
反射式拼接CCD相机非均匀性定标与校正
2014-11-09 09:08:54李晓杰任建伟李宪圣孙景旭刘洪兴
液晶与显示 2014年6期
李晓杰,任建伟,李宪圣,孙景旭,万 志,刘洪兴
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
1 引 言
为了满足遥感领域对大视场遥感图像的需求,国际上普遍采用CCD拼接以扩大相机视场[1]。CCD 拼接主要有机械拼接[2]和光学拼接[3]两种方式。其中光学拼接是利用棱镜的分光原理形成一对等光程面,将CCD在这一对等光程面上首尾搭接。根据所使用棱镜的不同,又可分为折射式、半反半透式和反射式拼接,其中折射式拼接会产生像差,半反半透式拼接能量利用率小于50%,反射式拼接因其可拼接长度较长,能量利用率高,体积重量较小、无像差等优点成为了未来光学拼接的主要发展方向。但反射式拼接由于自身拼接特点会在拼接交界处产生渐晕,从而影响成像面的非均匀性,这需要利用后续定标工作进行校正。
在反射式拼接CCD相机非均匀性校正过程中,由于光学系统设计复杂,成像面同时有反射镜参与,为了达到大视场的目的拼接所用到的CCD数目也较多,这就给整个光学系统能量传输模型的分析及后续的非均匀性定标校正工作带来一定的难度。目前国内关于非均匀性定标和校正的研究多是以单片CCD相机或机械拼接CCD相机为对象,无论在红外探测波段还是可见光波段,都有了比较成熟的理论和广泛的实践[4-8]。而针对反射式拼接相机非均匀性定标和校正的研究比较少,陶明慧等[9]针对两片面阵CCD的拼接,引用最速下降法,从渐晕图像的数码输出(DN)特征出发,通过软件拟合的方式确定公式中的参数后进行校正,取得了较好效果;张宇等[10]定量分析了入瞳处辐射亮度通过反射式光学系统和反射镜后,实际到达每个拼接CCD像元的辐射照度分布,但定标后校正算法的选取并没有依据这种能量分布规律,校正因子只能对某一亮度点图像取得满意的效果。
针对上述研究现状,本文从焦平面各像元接收到的辐射照度不同是引起反射式拼接CCD相机图像非均匀性的本质出发,首先在相机焦平面拼接前对单片CCD进行辐照度响应度定标,然后用积分球作为定标光源对相机整体进行非均匀性定标,得出入瞳辐亮度与像元接收到辐照度的关系。根据这一关系,设计校正算法,实现从较低到接近饱和亮度范围内对相机输出图像非均匀性的校正。
2 成像非均匀性产生机理分析
遥感器成像过程大体可描述为:地面物体发出的光能量通过大气传输到达光学系统入瞳处,通过光学系统后,到达成像面探测器并由光信号转化为可输出的电信号,最后经过图像采集系统输出显示。在实验室定标过程中可以忽略大气传输的影响,因此影响反射式拼接相机成像非均匀性主要有以下因素。
2.1 相机光学系统
对于非理想成像光学系统,其轴上像点和轴外像点接收到的照度满足关系(1):

其中:Ew为轴外像点接收到的辐射照度,E为轴上像点接收到的辐射照度,w为光学系统视场角。
可见,在视场角w较大的情况下,比如某些测绘相机(2w≈60°)轴上点和轴外点照度差别能达50%之多,这种非均匀性必须校正。而对于一般空间相机,其视场角较小,视场边缘辐射照度下降带来的非均匀性影响也较小。
对于反射式拼接CCD相机,其典型的拼接方式如图1所示。反射镜反射面与光轴呈45°角,反射面CCD与直射面CCD位于反射镜棱边的两侧,相当于在一对等光程面上,这样就保证了对同一大目标地物输出图像的完整性和同时性,也减小了拼接后焦平面的尺寸。
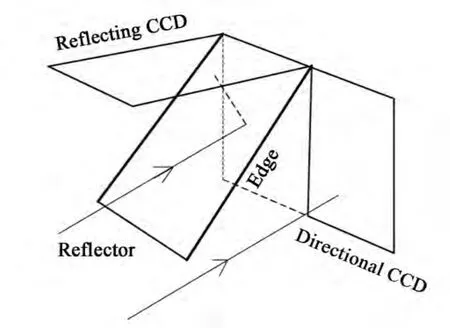
图1 典型反射镜拼接方式Fig.1 Typical mode of reflector-based mosaic CCD camera
然而由于拼接结构中反射镜的存在,在轴外点成像即光线斜入射时会对反射面CCD和直射面CCD形成遮挡,使得拼接交界区域像元接收到的实际辐射照度小于其他区域像元接收到的辐射照度,在输出图像上就表现为拼接交界区域灰度值下降,我们也称此区域为渐晕区。另外光线斜入射和直射时,也会因反射镜棱边的存在产生衍射现象,根据菲涅尔衍射及其改进型理论[11],衍射会造成拼接交界区域能量的重新分配。
2.2 CCD探测器自身特性
作为一种半导体图像传感器件,CCD在材料质量、制作工艺和结构上的局部差异性[12],会使得各像元的辐射响应度也存在不同。这样尽管各像元接收到的辐射照度相同,输出图像的灰度值也会表现出非均匀性。这种非均匀性与CCD局部的差异密切相关。本相机所选用CCD均属航天级,在响应度定标实验中也可以看出,4片CCD响应度基本一致,对图像非均匀性影响较小。
2.3 图像采集系统[13]
图像采集系统包括CCD驱动、传输以及处理电路,具体有时序驱动、信号预放大和放大以及A/D转换等电路。针对每一个CCD数据传输通道,如果这些电路的应用配置或者设定参数有不同,那么所得到每个像元的数码输出也会有区别。
通过以上分析,可以明确图像非均匀性是一个多重因素综合作用的结果。对于单片CCD相机或机械拼接CCD相机来说,光学系统不是引起图像非均匀性的主要因素;对于反射式拼接CCD相机,由于相机自身特殊的拼接结构,使得光学系统中反射镜的遮挡是最终图像非均匀性的主要原因。针对这种不同,需要重新设计定标实验和校正算法,实现图像非均匀性的校正。
3 实验室非均匀性定标实验
本反射式拼接CCD相机焦平面是由4片TDI-CCD构成,每片CCD分为两个数据输出通道,单通道有效像元数目为3071,量化位数12bit。
3.1 单片CCD辐照度响应度定标
在焦平面拼接前,对4片CCD进行响应度参量定标。定标光源采用标校后且光强输出稳定性优于0.5%/小时的溴钨灯,先用光谱辐射计测量距离溴钨灯1m位置处的辐射照度,然后根据距离反比定律可计算出任意位置处的照度;CCD及其驱动电路置于可由步进电机驱动并定位的光学导轨上;控制系统用于控制溴钨灯的光强和图像的采集及保存。
在暗室中通过调节CCD与溴钨灯的距离,获取10种不同辐射照度下的输出图像,以单片CCD为单位计算每个像元的辐照度响应度[14](计算时除去本底信号)及其响应非均匀性(PRNU),结果如表1所示。4片CCD的响应度平均值之间相差很小,且非均匀性均小于0.5%,也就是说CCD器件本身和后续的图像采集系统的差异不大,也可以说明这两种因素对图像非均匀性的影响较小。
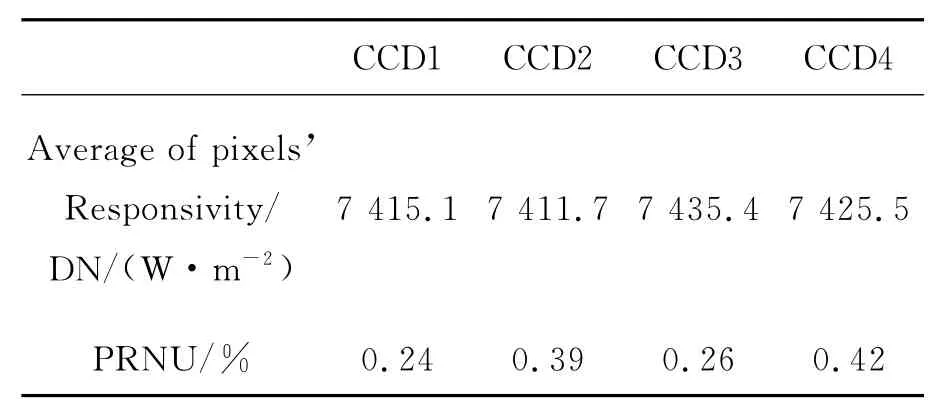
表1 CCD辐射响应度Tab.1 Responsivity of single CCD
3.2 整机均匀性定标
4片CCD按图1所示拼接方式在2个反射镜两侧交错放置,其中两片CCD位于焦平面的直射面位置,另外两片位于焦平面的反射面位置。CCD1第1通道和CCD4第2通道为正常通道,其他通道均为渐晕通道。
反射式拼接CCD相机整机实验室辐射定标装置示意图如图2所示。定标光源采用大口径积分球,它是一种理想的漫射扩展光源,开口处有很好的辐射照度面均匀性和朗伯特性[15]。本装置中积分球内径为4m,开口直径为1.2m,将拼接CCD相机放置在开口处恰当位置,能完全满足“全口径,全视场,端对端”的定标要求。电源箱控制积分球内96只溴钨灯,标校后的辐亮度计实时监测球体开口处辐射亮度,图像采集系统(与单片CCD响应度定标实验所用采集系统相同)能实时显示相机的输出图像。
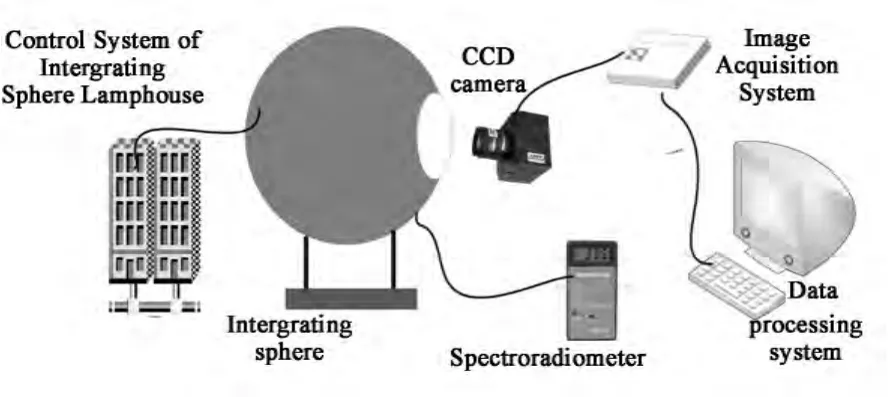
图2 实验室定标装置示意图Fig.2 Radiometric calibration setup in lab
在暗室中,先调节积分球开口处辐射亮度使相机输出图像接近饱和,然后依次降低积分球辐射亮度输出,通过图像采集系统分别获取33.91,32.01,26.91,21.90,17.81,13.01,8.21,3.79,0 W/(sr·m2)9个亮度点下的输出图像。
图3为辐射亮度为17.81W/(sr·m2)下所定标相机的输出图像。4片CCD拼接后形成了3个拼接交界区,尽管入射相同的辐亮度,在拼接交界区由于反射镜的遮挡,致使该处像元接收到的辐照度下降,故图像上就会表现出数码值较其他区域下降,就是看到的渐晕条纹。
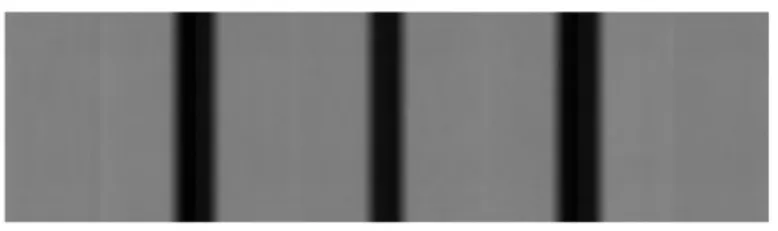
图3 入射亮度为17.81W/(sr·m2)的相机定标图像Fig.3 Calibration image which incident radiance is 3.75W/(sr·m2)
3.3 定标结果分析
各亮度点下单个像元接收的辐射照度Ei可由公式(2)计算,

其中:DNi为第i个像元输出图像数码值,REi为第i个像元的辐照度响应度。
图4为根据整机均匀性定标图像和对单片CCD定标所得到的响应度并利用公式(2)计算得到的8个辐射亮度点下各像元实际接收到的辐射照度(以直射面CCD1第2通道和反射面CCD2第1通道拼接后的输出图像为例)。
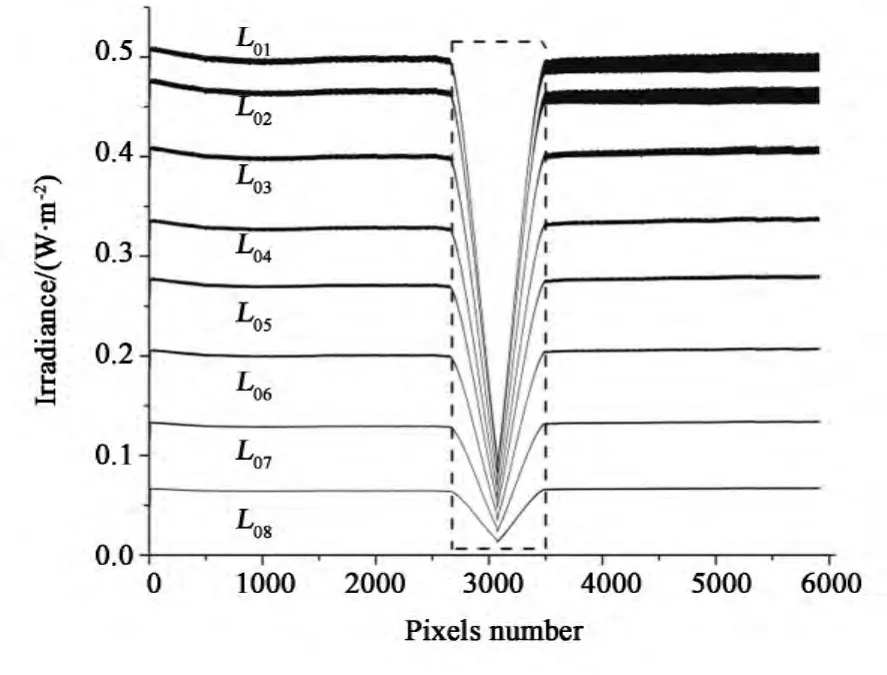
图48个亮度点下像元实际辐射照度Fig.4 Real irradiance of each pixel at eight radiances
其中虚线框表示渐晕区,其他区域为非渐晕区。可以看出渐晕区各像元辐照度下降严重,如L01亮度点下,非渐晕区像元接收到的辐照度大致为0.5W/m2,而渐晕区最中心位置像元只接收到0.1W/m2;由于反射面CCD和直射面CCD在反射镜棱边两侧呈等效对称位置,故各像元的照度分布也是对称的;另外由于反射镜对各像元的遮挡程度不同,故图像上表现出渐晕区各像元辐照度倾斜下降,而不是垂直下降趋势。
遥感器辐亮度响应度表征有光学系统参与的图像输出数码值与入瞳处辐射亮度之间的关系,描述的是相机整体响应度。对于反射式拼接CCD相机,焦平面各像元的辐亮度响应度RLi可由式(3)计算,

与辐照度响应度算法类似,计算出CCD1第2通道和CCD2第1通道拼接后各像元的辐亮度响应度如图5所示。同样虚线框内为渐晕区像元辐亮度响应度,虚线框外为非渐晕区像元辐亮度响应度。各像元辐亮度响应度曲线与辐照度响应度曲线表现一致。
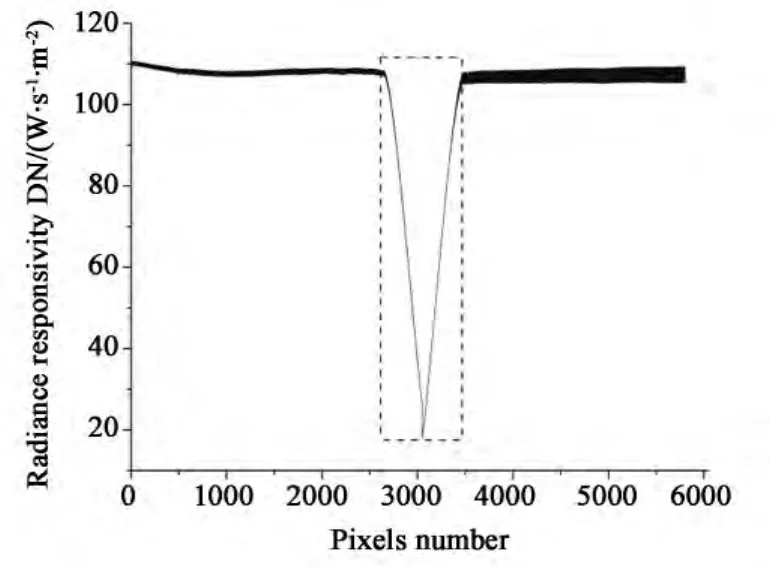
图5 各像元辐亮度响应度Fig.5 Radiance responsivity of each pixel
4 非均匀性校正
4.1 算法设计
从定标图3可以看出渐晕条纹严重影响图像的非均匀性,因此设计算法求出每个像元的渐晕校正因子以消除图像渐晕是反射式拼接相机后续定标工作的重要内容。理想情况下,反射式拼接CCD相机入瞳处辐射亮度L与成像面辐射照度E(w)之间的关系可以用公式(4)描述,

其中:F为相机光学系统相对孔径,Ad为CCD探测器面积,t为积分时间,τ为光学系统透过率,w为相机视场角,f(w)为反射式拼接CCD相机渐晕系数。

实际上,由于光学系统像差以及其他噪声的影响,入瞳处辐射亮度与像面辐射照度并不严格呈线性关系,可以用泰勒级数来表示其关系:

其中:A0i为无光入射时像元接收到的辐射照度,A1i为线性系数,A2i,A3i,…Ani为高次系数。
对于第i个像元假设高次系A2i,A3i,…Ani→0,用最小二乘法解超定方程组:

其中:j表示亮度点个数(j=1,2,3…8);Eji表示第j个亮度点下第i个像元接收到的辐射照度;Lj表示第j个入瞳辐射亮度。并统计了Eji和Lj的相关性,二者的一次相关系数均达0.9999,呈严格线性。结果表明,上述假设合理。所以,第i个像元接收的实际辐射照度与入瞳处辐射亮度关系可以写为:

又根据公式(2)(3)所表达的像元接收到的辐射照度和入瞳辐射亮度与图像输出DN值的关系,得出渐晕图像非均匀性校正方程:


将每个像元的一对渐晕校正因子写入相应的图像采集系统中,这样,对于同一入射辐射亮度,焦平面各像元就相当于得到相同的辐射照度,最终使得各像元输出数码值一致,实现图像非均匀性校正目的;而且应用此算法得出每个像元的一对校正因子可以校正一定入射亮度范围的输出图像。
4.2 结果分析
应用上述算法对CCD1第2通道和CCD2第1通道各亮度点下拼接后输出图像进行处理,计算出每个像元的校正因子B0和B1。8个亮度点下校正前定标图像数码输出曲线如图6(a)所示。和图(3)灰度图像所描述的一致,整个数码值下降区域对应图像上得渐晕条纹:如L1亮度点下,非渐晕区平均数码值为3800,而在渐晕区数码值最小为800,图像非均匀性严重。
将校正因子写入图像采集系统中,调节积分球相同的入射辐射亮度,8个亮度点下校正后定标图像数码输出曲线如图6(b)所示。从图中可以明显看到,渐晕区与非渐晕区像元在8个亮度点下的数码输出值基本一致。而且,校正前后各亮度点下数码输出平均值相当,也就是说校正后没有改变图像的真实性;
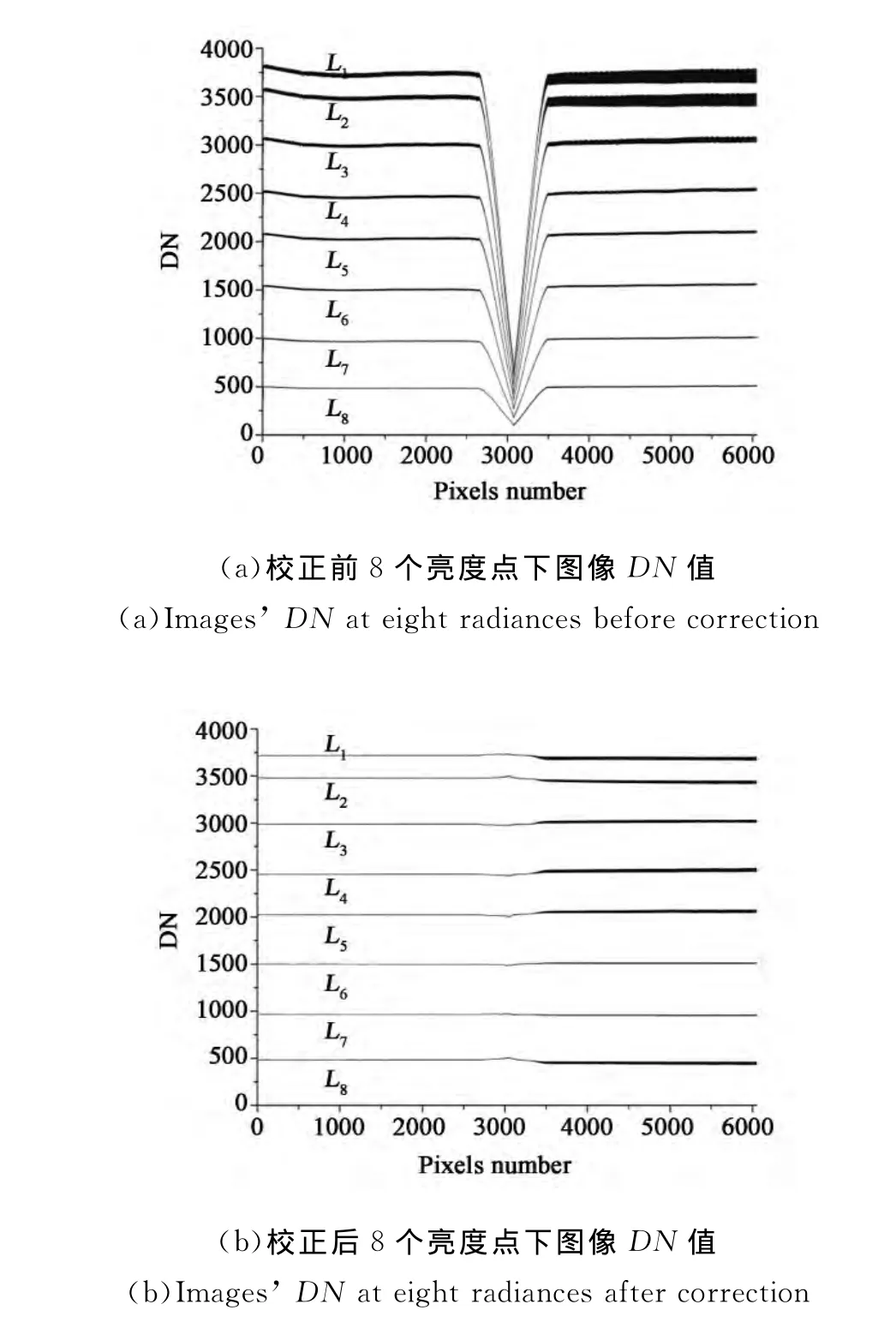
图6 校正前后图像DN值Fig.6 Images’DNbefore and after correction
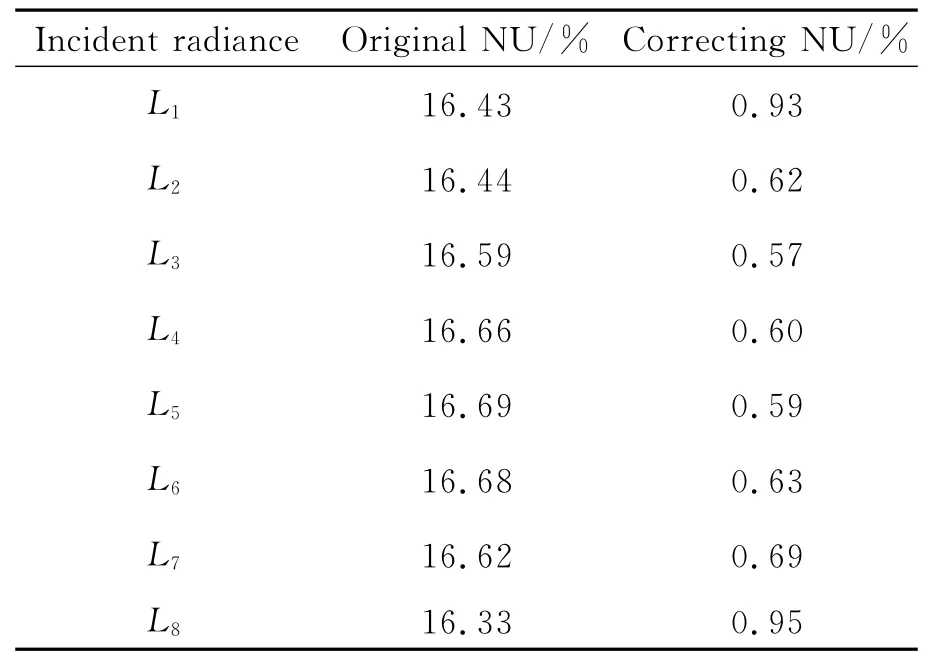
表2 校正前后8个亮度点下定标图像非均匀性Tab.2 Non-uniformity of images before and after correction eight radiances correction eight radiance
表2根据非均匀性(NU)评价公式[16]用统计数据描述了校正前后两幅图像整体数码输出的变化。高亮度点L1下,原始图像的非均匀性为16.43%,校正后下降为0.93%;中间L1至L6入射亮度范围内,校正后图像的非均匀性下降为0.7%之内;在低亮度点L8下,图像的非均匀性由校正前的16.33%下降为0.95%。经分析,由于高亮度点下图像接近饱和,低亮度点下暗信号噪声影响明显,致使高亮度和低亮度点下校正效果略差。
当入射辐射亮度同为17.81W/(sr·m2)时,经过非均匀性校正后的反射式拼接CCD相机输出的图像如图7所示。与图3比较可以发现,渐晕条纹基本消失,图像非均匀性理想。

图7 入射亮度为17.81W/(sr·m2)的定标校正后图像Fig.7 Correction image which incident radiance is 17.81 W/(sr·m2)
应用本反射式拼接CCD相机进行外场成像实验,图8给出了校正前后实际景物目标成像的情形,校正前3个拼接交界区域灰度值与正常区域差别较大,渐晕明显;校正后,交界处渐晕现象基本消除,图像层次清晰分明,整体细节容易分辨。
5 结 论
反射式拼接CCD相机因其自身特殊的光学拼接方式,输出图像在拼接交界处会出现明显的渐晕条纹。本文在对渐晕条纹产生的原因分析之后,对拼接CCD相机分别进行了拼接前“单片CCD辐照度响应度定标”和“整机均匀性定标”。前者定标结果说明用于拼接的CCD各像元的辐照度响应度基本一致,电子学系统工作正常;通过整机定标确定各像元实际接收到的辐射照度分布曲线,并结合所设计的算法,对输出图像的均匀性进行校正,从较低直至接近饱和的入射辐射亮度范围内,图像非均匀性从原始的16%下降为校正后的1%之内,很好地改善了图像的非均匀性。应用定标结果进行外场成像实验时,也取得了满意的效果。
[1]沈宏海,黄猛,李嘉全,等.国外先进航空光电载荷的进展与关键技术分析[J].中国光学,2012,5(1):21-28.Sheng H H,Huang M,Li J Q,et al.Recent progress in aerial electro-optic pay-loads and their key technologies[J].Chinese Optics,2012,5(1):21-28.(in Chinese)
[2]郭疆,龚大鹏,朱磊,等.测绘相机焦平面CCD交错拼接中重叠像元数计算[J].光学精密工程,2013,21(5):1251-1258.Guo J,Gong D P,Zhu L,et al.Calculation of overlapping pixels in interleaving assembly of CCD focal plane of mapping camera[J].Optics And Precision Engineering,2013,21(5):1251-1258.(in Chinese)
[3]李朝辉,王肇勋,武克用.空间相机CCD焦平面的光学拼接[J].光学精密工程,2000,8(3),213-216.Li Z H,Wang Z X,Wu K Y.Optical assembly of CCD focal plane for space camera[J].Optics And Precision Engineering,2000,8(3):213-216.(in Chinese)
[4]朱瑞飞,王超,魏群,等.红外探测器非均匀性校正系统研制[J].红外与激光工程,2013,42(7):1669-1673.Zhu R F,Wang C,Wei Q,et al.Manufacture of non-uniformity correction system for infrared detector[J].Infrared and Laser Engineering,2013,42(7):1669-1673.(in Chinese)
[5]任航.高分辨率大面阵CCD相机高帧频设计及其非均匀性的校正[J].红外与激光工程,2013,42(6):1491-1497.Ren H.High-resolution large area CCD camera frame rate design and its non-uniformity correction [J].Infrared and Laser Engineering,2013,42(6):1491-1497.(in Chinese)
[6]李丙玉,王晓东,李哲.在轨完成CCD非均匀性校正的方法[J].液晶与显示,2011,26(2):255-259.Li B Y,Wang X D,Li Z.Method of CCD non-uniformity correcting in orbit[J].Chinese Journal of Liquid Crystals and Displays,2011,26(2):255-259.(in Chinese)
[7]宁永慧,郭永飞.星上时间延迟积分CCD拼接相机图像的实时处理[J].光学精密工程,2014,22(2),508-517.Ning Y H,Guo Y F.Real-time image processing in TDICCD space mosaic camera[J].Optics And Precision Engineering,2014,22(2),508-517.(in Chinese)
[8]李宪圣,叶钊,任建伟,等.空间相机异常响应图像处理方法[J].液晶与显示,2012,27(4):557-561.Li X S,Ye Z,Ren J W,et al.Processing method for abnormal response of space camera image in orbit[J].Chinese Journal of Liquid Crystals and Displays,2012,27(4):557-561.(in Chinese)
[9]陶明慧,任建岳,张宇,等.反射镜拼接渐晕消除方法[J].光电工程,2011,38(6):45-49.Tao M H,Ren J Y,Zhang Yu,et al.Vignetting correction method of assembled images using reflector[J].Opto-Electronic Engineering.2011,38(6):45-49.(in Chinese)
[10]张宇,韩双丽,张珂,等.反射镜拼接相机渐晕消除方法[J].光机电信息,2011,28(6):23-29.Zhang Y,Han S L,Zhang K,et al.Methods of vignette elimination in reflecting-mirror-jointed camera[J].OME Information,2011,28(6):23-29.
[11]Keller J B.Geometrical theory of diffraction[J].Optical Society of America,1962,52(2):116-130.
[12]张宇,张立国,张星祥.行间转移大面阵CCD的Smear噪声实时去除[J].光学精密工程,2013,21(9):2389-2396.Zhang Y,Zhang L G,Zhang X X.Real-time elimination of Smear noise for large interline transfer area CCD camera[J].Optics And Precision Engineering,2013,21(9):2389-2396.(in Chinese)
[13]罗通顶,李斌康,郭明安,等.科学级CCD远程图像采集系统[J].光学精密工程,2013,21(2):497-504.Luo T D,Li B K,Guo M A,et al.Remote image acquisition system with scientific grade CCD [J].Optics And Precision Engineering,2013,21(2):497-504.(in Chinese)
[14]任建伟,刘则洵,万志,等.离轴三反宽视场空间相机的辐射定标[J].光学精密工程,2010,18(7):1492-1499.Ren J W,Liu Z X,Wan Z,et al.Radiometric calibration of off-axis three-mirror-anastigmat space camera with wide viewing field[J].Optics And Precision Engineering,2010,18(7):1492-1499.(in Chinese)
[15]刘洪兴,任建伟,李宪圣,等.基于Lighttools的大口径积分球辐射特性仿真[J].红外与激光工程,2013,42(4):960-965.Liu H X,Ren J W,Li X S,et al.Radiometric characteristics simulation of large aperture integrating sphere based on lighttools[J].Infrared and Laser Engineering,2013,42 (4):960-965.(in Chinese)
[16]宁永慧,郭永飞.TDI CCD拼接相机的像元响应非均匀性校正方法[J].中国光学,2013,6(3):386-393.Ning Y H,Guo Y F.Correction of pixel response non-uniformity in TDICCD mosaic camera[J].Chinese Optics,2013,6 (3):386-393.(in Chinese)
猜你喜欢
新能源科技(2022年9期)2022-11-20 19:28:56
锦绣·下旬刊(2021年11期)2021-10-12 09:54:22
中国电气工程学报(2020年2期)2020-07-28 10:17:04
环境技术(2020年1期)2020-03-06 11:41:02
科技视界(2019年20期)2019-08-29 02:57:44
物理实验(2017年2期)2017-03-21 07:20:41
风能(2016年8期)2016-12-12 07:28:48
光学精密工程(2016年6期)2016-11-07 09:07:15
光学精密工程(2016年1期)2016-11-07 09:01:50
电源技术(2015年7期)2015-08-22 08:48:32
