
水声信道均衡算法比较研究
2014-11-08 03:35裴晓黎1宁小玲2忠2张建强2海军装备部驻上海军事代表局上海200083海军工程大学电子工程学院武汉430033
计算机工程与应用 2014年1期
裴晓黎1,宁小玲2,刘 忠2,张建强2 1.海军装备部驻上海军事代表局,上海200083 2.海军工程大学 电子工程学院,武汉430033
1 引言
水声信道均衡的目的是消除信道对传输信号的影响和减小码间干扰,提高信息传输的可靠性。目前,在相干水声通信中,普遍采用自适应均衡技术。文献[1]描述了现在的数字水声语音传输系统,并采用LMS-DFE算法进行均衡,且进行了水池实验。文献[2]提出了一种DFE 结构的,基于复值广义归一化梯度下降的自适应步长调整归一化LMS 方法(GNGD-NLMS)来替代简单的LMS 算法,这种方法提高了跟踪信道的能力。文献[3]总结归纳了一种判决反馈均衡器加数字锁相环(DFE+DPLL)结构,并称其为标准化结构,该结构在相干接收机中已经进行了广泛的研究和应用。关于LMS类算法和RLS 类算法性能比较的文献也比较多。文献[4]对比研究了三种自适应均衡算法:自适应变步长LMS 算法、模稳定快速逆滤波算法和信道估计RLS 算法。上述三种算法均采用二阶锁相环(PLL)跟踪载波相位的变化。文献[5]的VS-XENLMS-DFE-2DPLL 算法收敛速度和克服码间干扰的性能和RLS-DFE-2DPLL 相当,但具有较小的计算量。
从提高通信带宽效率的角度看,采用自适应均衡技术,重复发射已知训练序列的代价较高。而采用不需要训练序列的盲均衡算法可有效节约带宽,提高通信速率。文献[6]研究了归一化常数模盲均衡算法的性能,采用均衡器与一阶锁相环级联的结构。实验结果表明,归一化常数模盲均衡算法的性能与自适应变步长LMS算法的性能较接近,可以完成对垂直信道的均衡处理。文献[7]针对CMADFE 收敛速率慢的问题,利用超指数算法收敛速度快的特点,提出了超指数迭代判决反馈水声信道盲均衡算法(SEIDFE),并在哈尔滨工程大学水池做了实验,验证了该算法误码率低,比几种自适应算法收敛快,更适合多途水声信道的盲均衡。文献[8]提出了一种带二阶锁相环的改进超指数迭代判决反馈盲均衡算法(NMSEI-DFE-2DPLL),获得了很好的收敛效果。
本文分别比较了自适应均衡和盲均衡算法各自的性能,并比较自适应算法和盲均衡算法在相同条件下的均衡性能,最后在消声水池进行了实验,就均衡输出星座图比较了算法的载波恢复性能、抗多径效应以及多普勒频移补偿的能力。
2 算法原理
2.1 自适应均衡算法
自适应均衡算法有很多种,大体可分为两类:最小均方误差(Least Mean Square,LMS)类自适应算法和递归最小二乘(Recusive Least Square,RLS)类自适应算法。其中,LMS 是基于最速下降法的典型自适应算法,计算复杂度低,结构简单,但它的收敛速度慢,收敛速度与自适应步长和失调之间存在着矛盾。针对这个问题,许多改进的自适应LMS 算法得到研究,如归一化LMS(NLMS)算法、变步长LMS(VSLMS)算法。RLS算法因具有较快的收敛速度而得到人们的重视,但其计算复杂度很高,所需的存储量极大。但LMS 算法和RLS 算法因各有其优势而在水声信道均衡中得到广泛应用。自适应均衡算法的基带模型图,如图1 所示。
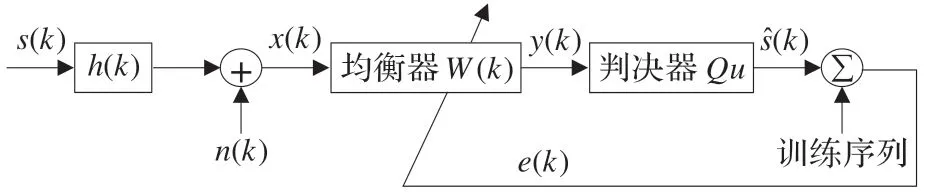
图1 自适应均衡算法的基带模型图
LMS 算法的权值迭代方程为:

2.2 盲均衡算法
盲均衡算法通常分为三大类:Bussgang 类盲均衡算法、高阶统计量类盲均衡算法以及非线性均衡器盲均衡算法。其中,Bussgang 类盲均衡算法中研究较为广泛的是常数模算法(Constant Modulus Algorithm,CMA),该算法采用最小均方误差准则进行迭代,代价函数仅与接收信号的幅值有关,而与相位无关,形式与LMS 算法很接近,但不需要期望响应。但是,由于其对相位是盲的,所以修正的CMA 算法(Modified CMA,MCMA)算法得以研究,它对于常模信号或非常信号都具有良好的收敛能力。基于高阶统计量的盲均衡算法中典型的算法有超指数(Super-Exponential Iteration,SEI)算法,该算法因具有近乎于超指数的收敛速度而在高速的水声通信中得到广泛应用。非线性均衡器盲均衡算法主要是有关基于神经网络的盲均衡算法,该类算法在水声信道均衡中应用的研究成果报道不多,主要是还不能真正应用于水声通信。盲均衡算法的基带模型图,如图2 所示。

图2 盲均衡算法的基带模型图
SEI算法的权值迭代方程为:

其中

可见,MCMA 算法将CM 代价函数分为实部和虚部两个部分,相当于将接收信号分为实、虚部二维变量联合确定相位,可在一定程度上进行载波相位补偿。由SEI 算法的表达式与CMA 算法迭代公式的比较可以看出,SEI 算法增加了一个Q(k)矩阵的运算,该矩阵可以完成对接收数据的预白化,从而使SEI 算法比CMA 算法具有更快的收敛速率。
3 算法性能比较与分析
3.1 仿真结果与分析
一个普遍的均衡器策略是判决反馈均衡器(Decision-feedback Equalizer,DFE),在信道失真严重的情况下,DFE 因其具有非常良好的时变跟踪性能而被广泛采用。因此,在以下的仿真实验中,均采用了基于DFE 的均衡算法。
3.1.1 典型的自适应均衡算法性能比较
仿真信道1 为典型的稀疏水声多径信道H1(z)=1-0.5z-14+0.4z-18,信噪比为25 dB,信号采用QPSK 调制方式。LMS-DFE 和VS-XENLMS-DFE 的前馈均衡器长度为Mi=64,反馈均衡器长度为Mb=64,RLS-DFE 的前馈均衡器长度Mi=128,反馈均衡器长度为Mb=64。
图3 给出了五种自适应均衡算法的均方误差曲线,可以看出:
(1)LMS-DFE 算法、VS-XENLMS-DFE 算法以及RLS-DFE 算法的收敛速度依次增快。
(2)LMS-DFE 和VS-XENLMS-DFE 算法相比RLSDFE 算法收敛稳定后的均方误差要小约1 dB。
(3)三种DFE 类算法的稳态误差相比LMS 算法和RLS 算法要小约5 dB。
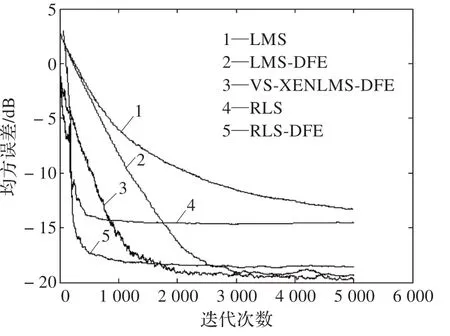
图3 自适应均衡算法的MSE 性能比较(SNR=25 dB,QPSK 调制信号)
可以得出结论:在复杂的稀疏多径信道环境中DFE均衡器的算法占明显优势;RLS 类算法的收敛速度明显优于其他算法,但复杂的计算量是其最大的缺陷,比LMS-DFE 类算法的计算量要高出一个量级;改进的LMS 类的算法不但具有优越的收敛速度、稳态误差,也因计算量小的优势越来越受到关注。
3.1.2 典型的盲均衡算法性能比较
对CMA、MCMA、CMA-DFE、MCMA-DFE、SEI-DFE、MSEI-DFE 等算法进行性能比较。利用文献[9]的深海信道模型进行仿真,H2=[0.244 3,0.118 3,-0.045 5,-0.090 5,0.676 6,0.662 2,-0.116 3,0.075 6],该信道是一个混合相位系统,有一零点十分接近单位圆,形成了很深的谱零点,因此,其均衡难度较大。在整个仿真过程中,判决反馈均衡器前向权采用中心抽头初始化,而反馈权采用全零初始化,前馈均衡器长度Mi=15,反馈均衡器长度Mb=8。Q 矩阵的初始值为均衡器一段输入数据的相关矩阵的逆:Q(0)=R-1,Q 矩阵的大小NQ=512。
从图4 可以看出:
(1)基于DFE 结构的算法相比CMA 和MCMA 算法对严重的频率选择性衰落有较好的克服能力,均衡效果要好得多,而CMA 和MCMA 算法在混合相位信道环境中不能收敛。
(2)SEI-DFE 相比CMA-DFE 算法由于其Q 矩阵对噪声的白化作用,收敛速度约快2 000 点,收敛后的稳态误差相同。同样的,MSEI-DFE 相比MCMA-DFE 算法的收敛速度也约快2 000 点。
(3)由于对相位的补偿作用,MSEI-DFE 和MCMADFE 类算法相比,SEI-DFE 和CMA-DFE 算法的稳态误差要约小6 dB。

图4 盲均衡算法的MSE 性能比较(SNR=20 dB,QPSK 调制信号)
综合可以看出,相比CMA类和MCMA类算法,MSEI类算法中Q 矩阵的计算增加了计算量,但收敛速度表现优越,在数字信号处理技术高速发展的今天,MSEI 类算法因其快速收敛性能而具有较高的应用价值。
3.1.3 典型的自适应盲均衡算法性能比较
为了比较两类算法的载波恢复性能,采用两径的相位旋转复信道[10]:H3=[e-0.7j,0,0,0.3e-1.8j],式中,e-0.7j表示直达路径,其幅度为1,相移为0.7 rad;e-1.8j为幅度为0.3,相移为1.8 rad 的多径,信道4 为稀疏多径相位偏转 复 信 道:H4(z)=(1-0.5z-14+0.4z-18)exp(-jπ/3)[11],在两种信道环境中,三种算法的步长均为μ=0.000 5,各算法的滤波器阶数均为M=61,仿真结果如图5 所示。

图5 自适应盲均衡算法的MSE 性能比较(SNR=20 dB,QPSK 调制信号)
从图5 可以看出,对于相位旋转复信道和稀疏多径相位偏转复信道,CMA、MCMA 算法和LMS 算法的均衡效果依次增强,MCMA 算法的载波恢复性能相比CMA 相差较大,稳态误差分别相差16 dB 和5 dB,与LMS 算法的稳态误差相当,但收敛速度相对慢一些。因此,对于复杂的相位偏转信道,自适应算法的收敛性能强于盲均衡算法,但是,MCMA 作为盲均衡算法,不需占用带宽资源,计算量小,且具有和LMS 算法相当的收敛性能,研究修正的MCMA算法是一项有意义的工作。
3.2 水池实验
为了对前面提出的自适应均衡和盲均衡算法的性能进行检验,在消声水池开展了实地实验,水声实验布局如图6 所示。在实验过程中,发射端和接收端分别放置于水下2.5 m 和3 m 处,水平间距4 m。为了模拟信道的多径效应和多普勒频移,实验条件为发射端剧烈移动。

图6 水声通信实验布局图
实验中各算法的参数如下,M 为滤波器阶数,Mi、Mb分别为前馈、反馈滤波器阶数,NQ表示超指数算法的Q矩阵大小。其中,MCMA:M=88;LMS:M=88;MCMADFE-DPLL:Mi=45,Mb=23;RLS-DFE-2DPLL:Mi=60,Mb=30;VS-XENLMS-DFE-2DPLL:Mi=101,Mb=50;MSEI-DFE-2DPLL:Mi=45,Mb=23,NQ=300。
图7 为发射端与接收端的间距为4 m,发射端剧烈移动时各种均衡算法的效果图。从图7可以看出,MCMA算法的性能较差,相位图比较混乱,误码率为24.71%;LMS 算法由于均衡性能稍好一些,误码率为0.252 5%;VS-XENLMS-DFE-2DPLL 算法由于DFE 结构以及内部包含了锁相机制,可以在一定程度上实现对相位偏差的跟踪,也能起到克服多径效应和多普勒频移补偿的作用,从而大大提高整个系统的均衡能力,具有较好的性能,误码率为0。利用带有锁相机制的MCMA-DFE-DPLL 算法的效果图,如图7(e)所示,可以看出MCMA-DFEDPLL 算法可以克服多径效应且对多普勒频移进行了较好的补偿,保证了整个均衡算法的正常运行,此时的误码率为0。同时可以看出,NMSEI-DFE-DPLL 算法星座图张开效果最好、最紧密集中,这正说明了超指数迭代算法的优越性。
4 结束语
本文采用稀疏多径信道进行自适应均衡算法的比较,结果表明DFE 结构的算法明显占据优势,且改进的LMS 类算法因其优越的收敛性能可望在工程上代替RLS 类算法。其次,采用混合相位信道对盲均衡算法进行了比较,结果显示,超指数算法由于Q 矩阵对噪声的白化作用,在收敛速度上明显优于CMA 类算法,且由于对相位补偿的重视,关于超指数算法的改进算法越来越具有优势。在此基础上,采用多径相位旋转复信对自适应算法和盲均衡算法的典型算法进行了比较,结果表明,自适应算法不需要考虑相位的影响,且在相同的步长条件下,收敛速度也快于盲均衡算法。最后,将以上算法在消声水池进行了实验,并重点比较了几种数字锁相环算法的收敛效果。可以看出,带锁相环的DFE 结构的算法在一定程度上实现了对相位偏差的跟踪,也能起到克服多径效应和多普勒频移补偿的作用,大大提高了整个系统的均衡能力,均具有较好的性能。

图7 消声水池实验(距离4 m,剧烈旋转运动(QPSK))
[1]Goalic A.Toward a digital acoustic underwater phone[C]//Proceedings of the MTS/IEEE Oceans Conference,Brest,France,1994:489-494.
[2]Abdaoui A,Laot C.Blind DFE based on NLMS algorithm with generalized normalized gradient descent regularization[C]//Proceedings of the Oceans 2009,Biloxi,2009:123-127.
[3]Kilfoyle D B,Baggeroer A B.The state of the art telemetry in underwater acoustic[J].IEEE Journal of Oceanic Engineering,2000,25(1):4-27.
[4] Blackmon F A,Canto W.Performance comparison of several contemporary equalizer structures applied to selected field test data[C]//Proceedings of Oceans 2000 Conference and Exhibition,Providence,2000,2:809-816.
[5]宁小玲,刘忠,罗亚松,等.水声信道快速收敛自适应算法[J].系统工程与电子技术,2010,32(12):2524-2527.
[6]Gomes J,Barros V.Acoustic channel equalization results for the ASIMOV high speed coherent data link[C]//Proceedings of OCEANS 2000 MTS/IEEE Conference and Exhibition,Providence,2000,2:1437-1442.
[7]王峰,赵俊渭,陈华伟,等.超指数判决反馈水声信道盲均衡算法实验研究[J].声学学报,2004,29(5):414-418.
[8]宁小玲,刘忠,罗亚松,等.一种有效的水声信道载波恢复盲均衡算法[J].西安电子科技大学学报,2012,39(1):151-156.
[9]张欲.基于声场模型的水声通信特性与系统设计的研究[D].西安:西北工业大学,2000.
[10] Falahati A,Woodward B,Bateman S C.Underwater acoustic channel models for 4800b/s QPSK signals[J].IEEE Journal of Oceanic Engineering,1991,16(l):12-19.
[11]王峰.基于高阶统计量的水声信道盲均衡理论与算法[D].西安:西北工业大学,2003.
猜你喜欢
电测与仪表(2017年24期)2017-12-19
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
系统工程与电子技术(2016年7期)2016-08-21
电子器件(2015年5期)2015-12-29
电源技术(2015年1期)2015-08-22
电测与仪表(2015年9期)2015-04-09
声学技术(2014年1期)2014-06-21
电测与仪表(2014年8期)2014-04-04
电子设计工程(2014年18期)2014-02-27