惠斯顿杠杆的设计分析
2014-11-06 06:16:14殷洪霞
冶金设备 2014年1期
殷洪霞
(中冶东方工程技术有限公司 内蒙古包头 014010)
2006年底包钢轨梁厂配套建设“型钢加工线”,其所用的惠斯顿移钢机是编组区重要的传输设备,见图1和图2。惠斯顿移钢机的功能是把运输辊道上过来的型钢托起放在链式运输机上,其主要机构就是惠斯顿杠杆,目前在许多工程中都在使用这一机构,本文的目的是分析其结构、工作原理、对这一结构的设计关键点、制造、安装的关键环节做一论述,为以后的改进、优化提供理论依据,为施工现场提供一些借鉴。
1 惠斯顿杠杆结构
惠斯顿杠杆(如图3),由张紧装置、配重、活动链轮、托盘、保护罩等共同组成转臂装置(如图4),然后转臂装置和转轴用键固接在一起,这样转臂装置能随着转轴同步转动,其次固定链轮和转轴空套,焊接在轴承座上。目的是使固定链轮相对地面静止。最后链条把活动链轮和固定链轮连接起来,形成惠斯顿杠杆。在转臂装置中,活动链轮和托盘与小轴以键刚性联结形成一个整体,这个整体再通过轴承和转臂装置活动联结。
2 惠斯顿杠杆的工作原理

图1 惠斯顿移钢机主视图
惠斯顿杠杆的左侧是链式运输机,右侧是型钢的运输辊道,它的初始位置在辊道的下面,当型钢在辊道上停下时,惠斯顿杠杆的转轴在电机、减速电机的驱动下开始转动,从而带动托盘托起型钢,在固定链轮和活动链轮的传动比等于1的条件下以及链条的拉力控制下,托盘会保存初始的水平状态随着转臂做圆周轨迹的平动,实际上托盘就像行星一样,既随着转臂作公转,又有自己的自转。托盘的这两种运动相互抵消即得到了平动。当托盘转到左侧的链式运输机上时,型钢就被放在了上面,此时惠斯顿杠杆继续沿逆时针空转到辊道的下面,即上个动作的起始点。这时惠斯顿杠杆就完成了一个周期的动作。

图2 惠斯顿移钢机左视图
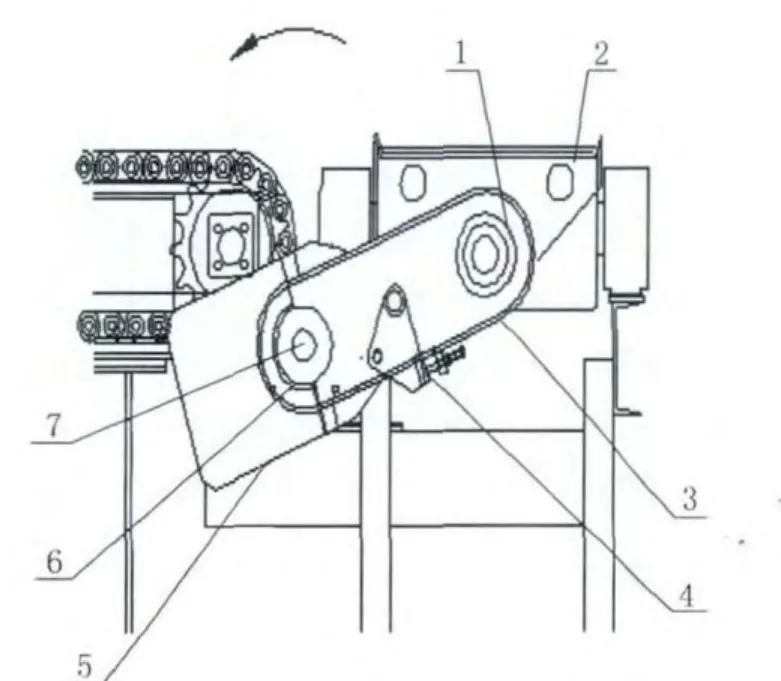
图3 惠斯顿杠杆结构示意图

图4 转臂装置三维图
3 设计惠斯顿杠杆时的几个关键点
3.1 固定链轮和活动链轮齿数相等
从运动学角度来分析,首先转轴在电机带动下以转速ωe转动,转臂装置与转轴由键刚性联结,故转臂装置也以转速ωe转动,即托盘的牵连运动为转动,又因为托盘以一个小轴通过轴承与转臂装置活动联结,所以,托盘相对于转臂装置以角速度ωr相对运动,即托盘的牵连运动也为转动。由理论力学的知识:刚体绕两个平行轴转动合成的结论:当ωe和ωr等值而反向时刚体绕瞬时轴转动的角速度ωa=0,即当刚体以同样大小的角速度同时绕两个平行轴而反向转动时,刚体的合成运动为平动[1],所以,只要使托盘相对角速度和牵连角速度大小相等方向相反即ωr=-ωe,就能保证托盘作平动。因为活动链轮与托盘在同一小轴上固接,所以,活动链轮相对于转臂装置的角速度也是-ωe,由前面结构可知,固定链轮相对于转臂装置的角速度是-ωe。根据齿轮传动比的计算公式:
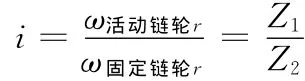
由上面论述可知

设固定链轮的齿数为Z1,活动链轮的齿数为Z2,所以Z1=Z2,即固定链轮和活动链轮的齿数相等
3.2 转轴转速ω的变化规律
惠斯顿杠杆的力学简化模型如图5所示,坐标系X OY取在转轴的中心O1,转轴的曲柄长度为R,转轴转过角度为θ,转轴的转速为ω,与托盘固结的连杆AO2的长度为h,设托盘上与钢材的接触点为A点,建立点A的运动方程为

由(1)(2)两式得

由(3)式可知质点A运动轨迹是以(0,h)为圆心,以R为半径的圆。对质点A运动分析如图5,由于质点A运动轨迹是以(0,h)为圆心,以R为半径的圆,设质点A的绝对转速为ωA,则质点A的绝对速度为νa=ωA×R,另外,点A的速度从合成运动来分析,其牵连运动是以转轴中心O1为圆心,转速为转轴转速ω,半径为L的圆周运动,则质A点的牵连速度为νe=ωe×L,点A的相对运动是以铰链O2为圆心,转速为ωr,半径为h的圆周运动,则质A点的相对速度为νr=ωr×h
由点的合成运动可知:

在A点建立另一个坐标系X1AY1,对(4)式在轴Y1A取投影又由图中几何关系得

由(5)式可知由电机、减速机驱动的转轴转速ω和质点A的绝对转速ωA相同。即转轴转速ω的变化规律由钢材实际运动变化规律决定的。而实际上希望钢材在起始点被托盘慢速托起,再加速、匀速、减速、再慢速把钢材放下,那么要求转轴转速ω也应该是这样变化的。实际工作中转轴转速ω是按接近于正弦规律变化的如图6。
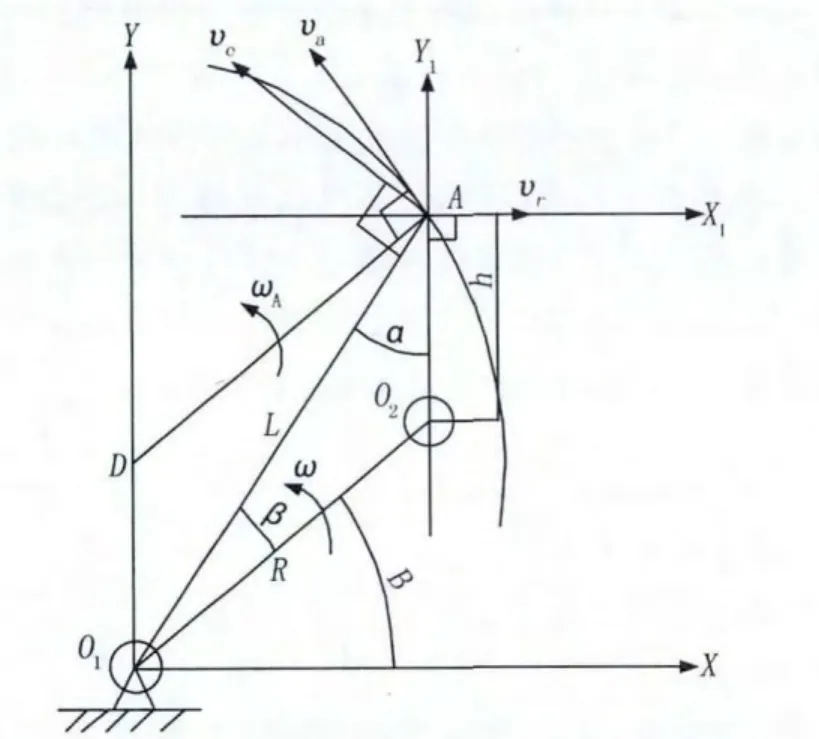
图5 质点A运动分析图

图6 转轴速度图
3.3 链条拉力
链条的拉力为托盘始终做平动提供了一定的动力来源。惠斯顿杠杆的简化模型如图5所示,坐标系XOY取在转轴的中心O1,转轴的曲柄长度为R,转轴转过角度为θ,转轴的转速为ω,与托盘固结的连杆AO2的长度为h,设托盘上钢材的质点为A点,由(3)(4)两式求二阶导数可得质点A的加速度如(6)(7)两式


图8 部件受力分析图
再对质点A受力分析如图7所示,质点A受到托盘对它的支持力N、摩擦力f和本身的重力G=mg,由牛顿第二定律得

下面以小轴BO2、托盘(包括托盘下面的连杆O2A)、活动链轮组成的系统为研究对象,对它进行受力分析如图8所示,由前面叙述可知,托盘及其固结的连杆O2A在惠斯顿杠杆运动过程中始终做平动,活动链轮、连杆O2A、托盘与小轴BO2以键固结,所以活动链轮和小轴BO2都做平动。平动就说明,图8组成的系统在运动过程中相对于惯性系没有转动,故所有力对小轴BO2取矩得

从而推出

式中f—托盘对钢材摩擦力的反作力;
N—托盘对钢材支持力的反作用;
FO2X、FO2Y—铰链对O2点的作力;
FBX、FBY—轴承对B点的作用力;
F—链条对链轮的拉力;
r—链轮的分度圆半径。
由上式可以看出,当转轴的转角规律确定后,链条的拉力和钢材的质量m、转轴长度R、托盘下面的连杆长度h以及活动链轮的分度圆半径r有关。当运送的钢材一定时,可以缩短托盘下面的连杆,缩短转轴长度、加大链轮来减小链条的拉力。
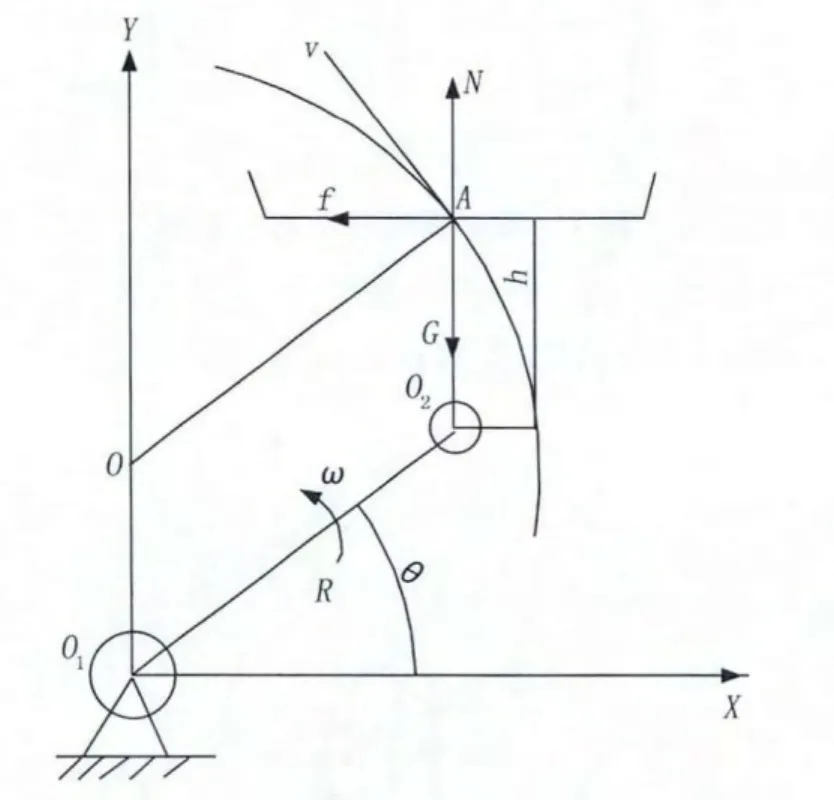
图7 质点A受力分析
3.4 转轴临界速度
转轴的临界速度就是使质点A不脱离托盘时转轴的最大速度,所以这也是设计时必须要考虑的。从质点A的受力图7可以看出当转轴转到90°时是临界点,这时要满足下式成立

4 安装时出现的问题及解决办法
4.1 托盘无法调平
原因是先把固定链轮定位,装好链条,然后调托盘,这样特费时费力,很难调平,正确的安装顺序是,在固定链轮没定位之前调平托盘,然后再固定好固定链轮的位置。
4.2 链轮的轮齿被咬坏或张紧轮被扭曲
原因是活动链轮、固定链轮、张紧轮三者没在一条线上,致使链条受力不在一个面上,链轮或张紧轮的受力也不在径向上,所以,链轮的轮齿被咬坏,或者张紧轮被扭曲。解决的办法是使固定链轮用螺栓与轴承座可调联结,当调好时再锁死。另外,三个轮子的轴向定位要牢固,保证其在工作中不窜动。
5 结束语
从运动学和力学的观点阐述了设计惠斯顿杠杆时注意的几个关键处,惠斯顿杠杆在机械行业已经被广泛应用,但是在其原理的基础上做进一步的延伸或改进,设计出更适合实际应用的机构,为现场实际应用提供有价值的参考。
[1]哈尔滨工业大学理论力学教研组编.理论力学.北京:高等教育出版社,1997.
[2]肖永力著.惠斯顿杠杆的研究.重型机械,1995(1):19~21.
猜你喜欢
上海大中型电机(2021年1期)2021-06-09 09:12:06
轮胎工业(2020年2期)2020-03-01 23:46:46
山东冶金(2019年2期)2019-05-11 09:12:24
汽车零部件(2018年11期)2018-12-08 06:24:22
制造技术与机床(2017年11期)2017-12-18 06:47:08
电脑爱好者(2016年23期)2017-01-05 20:39:51
设备管理与维修(2016年7期)2016-04-23 06:51:42
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
装备环境工程(2015年5期)2015-02-28 01:20:38
装备环境工程(2015年5期)2015-02-28 01:20:34