井巷三维人员定位系统关键技术
2014-10-31 02:36:34邱银国张振国王小兵
金属矿山 2014年7期
邱银国 张振国 王小兵
(1.安徽科技学院城建与环境学院,安徽滁州233100;2.中钢集团马鞍山矿山研究院有限公司,安徽马鞍山243000;3.金属矿山安全与健康国家重点实验室,安徽马鞍山243000;4.金属矿产资源高效循环利用国家工程研究中心,安徽马鞍山243000)
长期以来,在我国的煤炭开采过程中,井上、井下处于隔离状态,井上人员无法及时获取井下人员的实时位置等信息[1-2],给日常管理与灾后救援工作带来了极大的困难[3]。如何利用信息化技术提高煤矿企业对井下人员的管理水平是当前煤矿企业急需解决的问题[4]。现有的人员定位系统大多通过将巷道平面分布图的坐标系与定位分站及人员的坐标进行匹配,利用GIS地图管理功能描述人员的平面位置。此类二维人员定位系统在一定程度上使得管理人员对井下人员的位置分布情况有所掌握,但由于巷道间的特殊关系,不同层的巷道在平面图中有可能存在重叠的情形,因此目前的井下人员定位系统容易造成定位地点不明确、考勤争议等情况,只能用于下井人员区域定位和进出登记[5-8]。为满足煤矿企业安全生产的需求,本研究基于WiFi、虚拟现实、GIS等技术,构建了煤矿井巷三维人员定位系统。该系统能够实现人员信息管理、实时显示井下人员分布情况、跟踪指定人员、动态展示人员位置及周边环境信息等功能,可为灾后救援、考勤管理、生产调度等提供决策依据。
1 系统结构及工作原理
1.1 系统结构
煤矿井巷三维人员定位系统基于WiFi、虚拟现实、GIS等技术实现,其结构主要包括人员定位系统服务器、人员识别卡、定位分站、WiFi无线传输网络、数据传输接口、防雷器、数据引擎等,如图1所示。
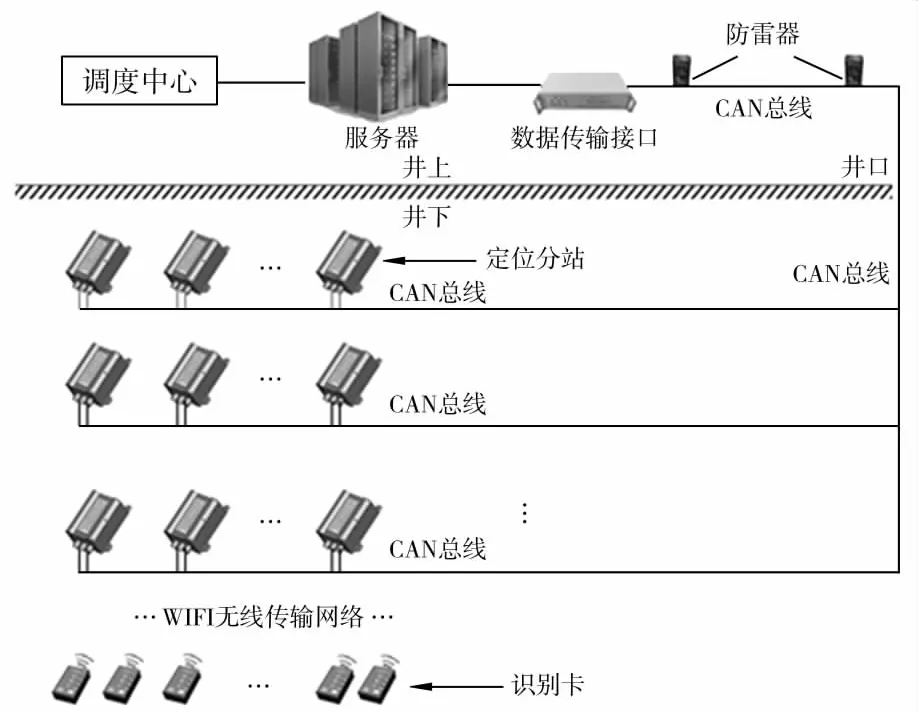
图1 井巷三维人员定位系统结构Fig.1 Structure of 3D underground personnel positioning system
(1)识别卡。集成于下井人员所佩戴的安全帽中矿灯附近的位置,其中保存有约定格式的电子数据,系统确定井下人员的位置实际上是确定人员随身携带的识别卡的位置。当识别卡进入定位分站的识别区域时,将用于人员识别的数据通过WiFi网络发送给定位分站。
(2)定位分站。可以通过无线连接的方式接收识别区域内识别卡发送的人员定位信息,并通过矿用通信电缆(CAN总线)经数据传输接口传输至地面服务器。
(3)数据传输接口。通过串口服务器与矿上局域网-环网连接,接收井下定位分站传输的数据,并传输给服务器处理。
(4)服务器。接收通过数据传输接口传入的数据,利用数据引擎对数据进行预处理并将处理后的结果数据存储在目标数据库中。
(5)数据引擎。存在于服务器中的一组特定的数据处理程序对人员的定位数据进行预处理,实现系统数据的规范存储,提高数据检索的效率,为实现系统功能做好数据准备。
1.2 系统工作原理
矿井巷道环境如图2所示,巷道的长度可达几百米甚至上千米,而其宽度和高度不过4~5 m,考虑到这种比例关系,完全可以忽略高度和宽度方向上的定位误差,而只用人员在巷道轴向的位置来标识人员的实时位置。
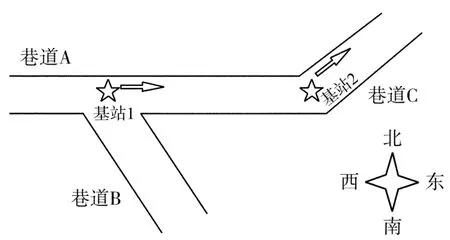
图2 巷道环境示意Fig.2 Schematic diagram of roadway environment
井巷三维人员定位系统的工作原理如下。
(1)井巷内安置定位分站。安置的原则为在巷道转弯或分叉处必须安置至少1台分站,对于长度超过定位分站的有效定位距离的巷道,应在其中间位置根据需要放置1个或多个分站以保证没有定位盲区,并将其定向天线指向合适的方向,避免信号干扰。
(2)井下实测。在每个分站的定位区域内,分别将识别卡置于距离分站最近与最远处,测得两处的信号强度,建立定位分站之间的拓扑关系表,如表1所示。由于信号强度理论上是呈线性变化的趋势,因此,当识别卡位于某个定位分站的有效定位区域时,根据当前分站和下一分站的坐标所确定的直线的方程,结合该分站接收信号的强度,利用空间插值技术确定人员的准确位置。
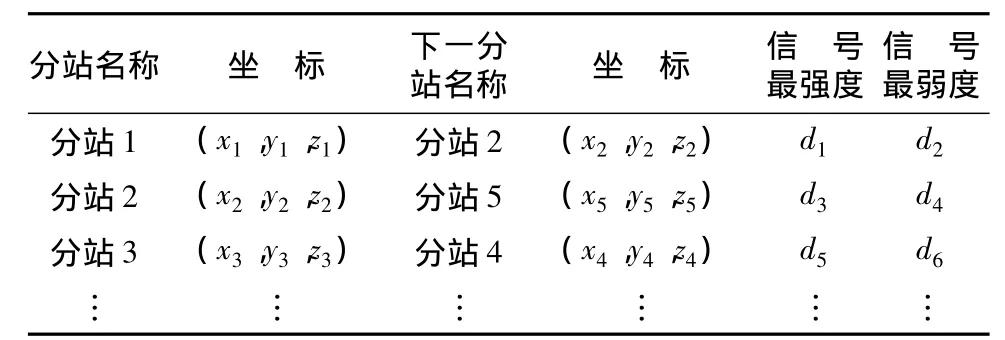
表1 分站-分站拓扑关系Table 1 Topological relationship between sub-stations
(3)定位分站定期采集1次数据并将其通过矿用通信网络经数据传输接口传输至服务器,该数据称为1个记录。每个记录的内容由4个部分组成:定位分站中网卡的MAC地址、识别卡的MAC地址、定位分站接收的信号强度以及接收信号的时间。
(4)调度中心的计算机根据记录中定位分站的MAC地址确定该分站及其下一分站的空间坐标,结合记录中的信号强度可以确定识别卡(人员)的具体位置。在三维场景中,根据人员的坐标,应用摄像机遮挡检测算法,更新主摄像机的空间位置与方向。
2 关键技术研究
井巷三维人员定位系统采用的关键技术有无线实时定位、真三维显示、改进的摄像机遮挡检测技术。无线实时定位可实现对人员的实时跟踪,真三维显示可准确直观地显示人员的具体空间位置及周边环境信息,改进的摄像机遮挡检测算法可避免三维场景中障碍物遮挡摄像机视线情况的发生,确保人员周边环境信息的实时全方位展示。
2.1 WiFi无线实时定位
WiFi是当前流行的一种无线局域网技术,又称802.11标准[9],是IEEE定义的一个无线网络通信的工业标准,具有覆盖范围广、可靠性高、传输速度快、有效距离长等特点[10-12]。该标准定义了2种工作模式[13]:ad hoc模式和infrastructure模式。前者为点对点模式,包含2个无线站点;后者即AP(Access Point,无线网络接入点)模式,无线站点通过AP与现有的骨干网相连接,组成1个基本服务组(BSS)。
在无线局域网覆盖的区域内,井下工作人员随身携带的WiFi识别卡周期性地向AP发出信号,与定位分站进行信息交流。以图2为例,在基站1的有效定位区域内,实时定位过程如下。
设基站1的空间坐标为(x1,y1,z1),基站2的空间坐标为(x2,y2,z2),由这2个基站的坐标可确定的空间直线L的“点向式”方程为

由于基站1与基站2的空间坐标已知,因此,在3个未知数x、y、z中,若其中1个为已知,则另外2个是唯一确定的。由表1数据可知,在当前区域内,信号最强度、最弱度分别为d1、d2,设人员实时位置为(x,y,z),则坐标求解公式为

即

其中,d为接收到识别卡信号的强度。根据每一时刻的d值可确定x,同理可以求解出y和z,进而确定人员的实时位置。其他基站的定位原理与基站1的相同,不再赘述。
2.2 三维展示与摄像机遮挡检测
系统采用优秀建模工具3ds Max和实时仿真软件Unity3d实现井巷人员周边环境三维视景表现。视景表现系统由3个部分构成:场景建模、视景生成和实时定位,如图3所示。
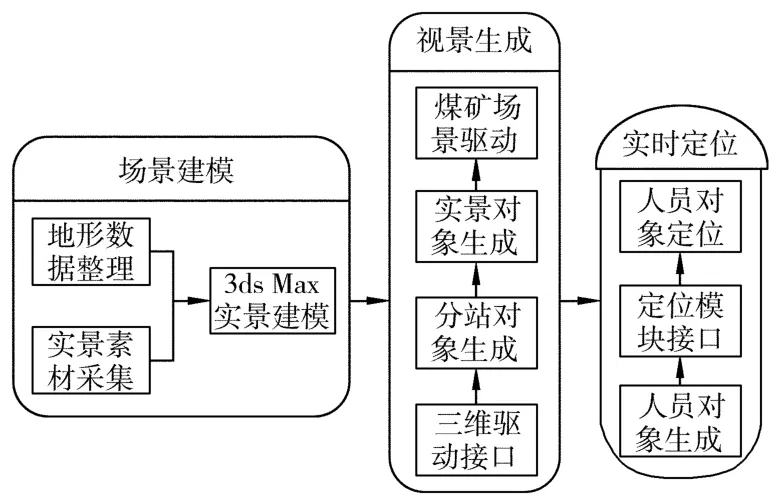
图3 井巷三维定位视景展示系统结构Fig.3 Structure of 3D underground positioning and scene displaying system
场景建模部分包括整理巷道平面分布图纸(CAD格式)、素材采集,并以之为基准,辅以巷道中一定数量控制点的实测高程数据、井巷中物体的空间坐标数据、拓扑关系数据等,利用3ds Max软件建立井巷环境的三维立体模型,效果如图4所示。

图4 井巷三维建模效果Fig.4 Effect of 3D roadway modeling
视景生成部分使用Unity3d的三维驱动接口实现虚拟场景的生成和驱动,包括虚拟定位分站对象构建、井巷模型构建、其他场景元素构建、煤矿场景的虚拟装配等,并实现基础的人机交互功能;实时定位部分可实时生成人员角色模型,并通过定位模块接口对人员进行实时定位显示。
在系统实时展示人员的位置信息及其周边三维场景信息时,应用摄像机防遮挡技术可有效避免由于摄像机与人员之间存在障碍物而导致摄像机视线被遮挡的问题。即在每一次人员定位时,根据人员与摄像机之间的通视情况适当调整摄像机的位置以保证目标人员恒位于摄像机的视野之内。设在定位过程中,系统预设的摄像机与人员间的距离为D且方向为恒定量。在计算获得人员坐标数据后,先按恒定的方向与D确定摄像机的坐标与方向,然后根据摄像机与人员之间的通视性调整摄像机的坐标。通视性检测方法为:以摄像机坐标为起点,发射1条经过人员坐标位置的射线,并计算位于摄像机与目标人员之间的线段与三维场景中所有物体的交点。若交点数量为0,则无需调整摄像机的位置;否则,获取距离目标人员最近的1个交点坐标,并将其作为调整后的摄像机坐标值。核心代码从略。
应用改进的摄像机遮挡检测算法进行人员定位的效果如图5所示。
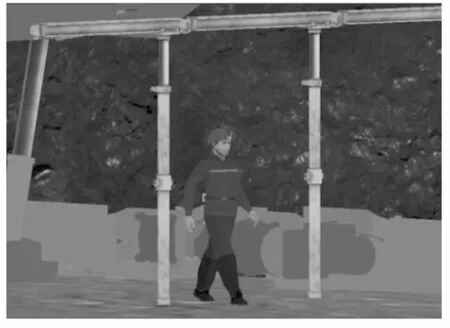
图5 井巷三维人员定位系统效果Fig.5 Effect of 3D underground personnel positioning system
3 定位性能评估
为验证定位算法的性能,以同煤集团某矿为试点,进行了实地模拟实验。以KJ98基站为硬件平台,在一个长约75.3 m、宽约3.5 m、高约2.5 m的区域内对15个采样点进行定位实验,结果如表2所示。
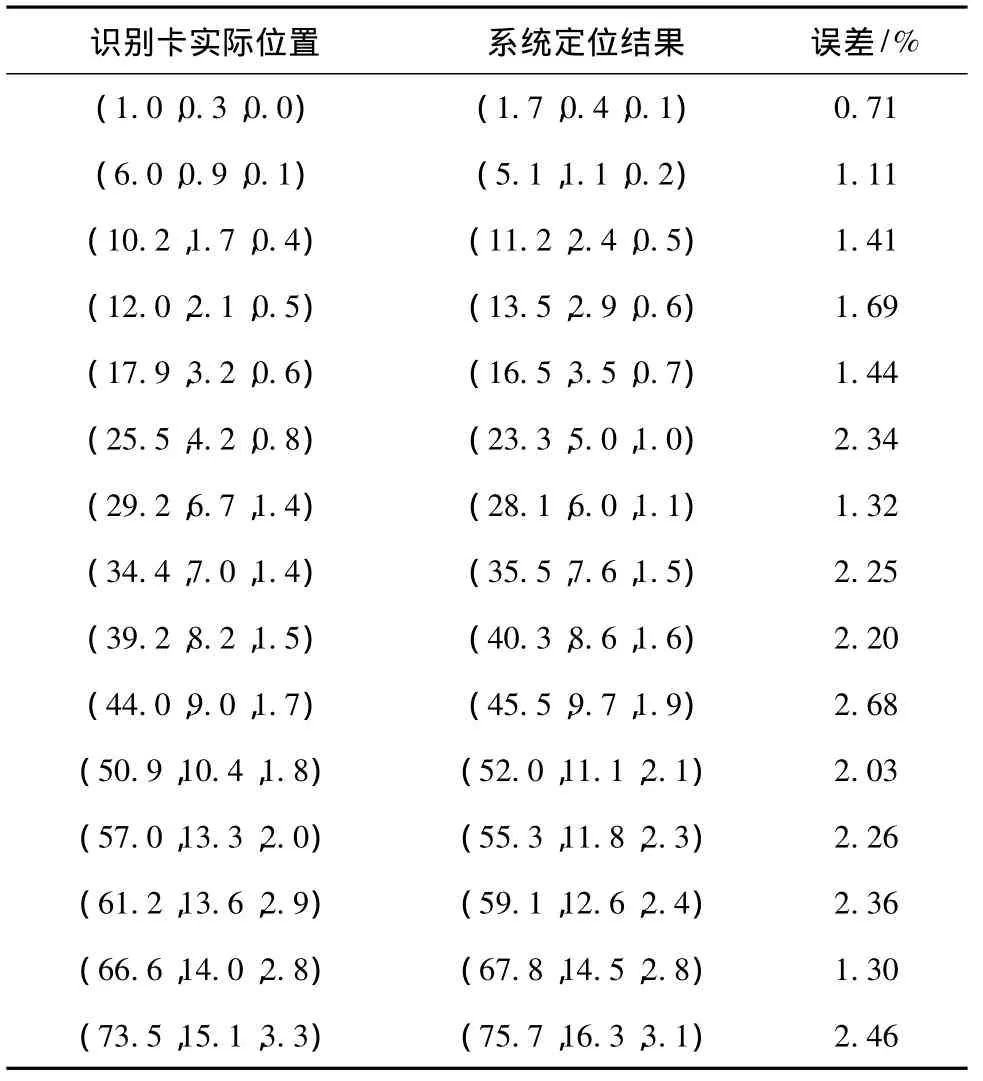
表2 实验结果Table 2 The result of experiments
表2中的误差定义为


其中,(xr(i),yr(i),zr(i))表示识别卡实际位置;(xd(i),yd(i),zd(i))表示系统定位的结果数据。
对误差进行分析,结果如表3所示。

表3 误差分析结果Table 3 The result of error analysis
其中,平均误差珔E、误差标准差srr及均方根误差sJF的定义分别为
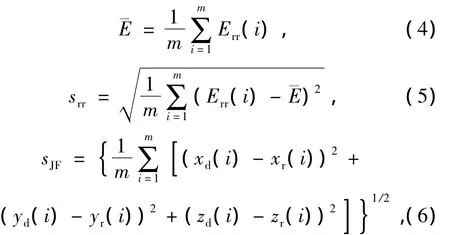
其中,m表示采样点数量。
由实验结果可知,井巷三维人员定位系统的定位误差基本控制在3 m之内,基本满足井下实时定位的需求。系统定位误差随着识别卡与定位分站之间距离的增大呈增大趋势,可以通过增加井下定位分站的数量,达到减小定位误差、提高定位精度的目的。
4 结论
目前常用的人员定位系统以二维显示形式为主,其适用于地面定位,能从全局的视角洞察人员整体分布情况,但在煤矿井下的应用存在较大缺陷。煤矿的巷道分布错综复杂,且存在上下层重叠的情况,二维的人员定位系统仅能显示人员所在的平面位置,无法表达上下层的信息,因此无法准确判断人员的具体位置等。介绍了一种井巷三维人员定位方法,采用三维全景的方式来显示人员位置及周边环境,可以准确得知其具体位置,为调度管理、应急指挥、解决定位模糊、考勤争议等问题提供了决策支持。通过井下实验验证了系统的定位误差基本控制在3 m之内。
[1] 史大伟,何继兰.煤矿井下人员定位系统关键技术探讨[J].煤矿机械,2010,31(9):82-84.Shi Dawei,He Jilan.Discussion on key technologies of personnel location system in coal mine[J].Coal Mine Machinery,2010,31(9):82-84.
[2] 郁万里,黄艳秋,李少军,等.一种基于WiFi的井下人员精确定位算法[J].煤矿安全,2011,42(7):97-99.Yu Wanli,Huang Yanqiu,Li Shaojun,et al.A precise positioning al-gorithm for underground staff based on WiFi[J].Safety in Coal Mines,2011,42(7):97-99.
[3] 刘志高,李春文,邢智鹏,等.巷道网络全局定位系统关键技术分析与实验[J].煤炭学报,2011,36(3):519-526.Liu Zhigao,Li Chunwen,Xing Zhipeng,et al.Key issues analysis and experiment of the global positioning system in underground tunnel network[J].Journal of China Coal Society,2011,36(3):519-526.
[4] 王保德.煤矿井下三维人员定位及信息管理系统的研究[J].工矿自动化,2011(12):98-100.Wang Baode.Research of 3D positioning and information management system in coal mine underground[J].Industry and Mine Automation,2011(12):98-100.
[5] 蒋 磊,于 雷,王振翀,等.基于WiFi和ZigBee的井下人员无线跟踪与定位系统的设计[J].工矿自动化,2011(7):1-6.Jiang Lei,Yu Lei,Wang Zhenchong,et al.Design of wireless tracking and positioning system of underground personnel based on WiFi and ZigBee[J].Industry and Mine Automation,2011(7):1-6.
[6] 张水平,袁飞亮.RFID技术在矿山井下人车智能安全管理中的应用研究[J].南方金属,2006(1):12-14.Zhang Shuiping,Yuan Feiliang.RFID technique and its application in safety management system for people and vehicle in mine shafts[J].Southern Metals,2006(1):12-14.
[7] 白婷婷.基于ZigBee协议的井下人员定位系统的研究[D].阜新:辽宁工程技术大学,2010.Bai Tingting.Research on Mining Person Localization System Based on ZigBee Protocol[D].Fuxin:Liaoning Technical University,2010.
[8] 张长森,董鹏永,徐景涛.基于ZigBee技术的矿井人员定位系统的设计[J].工矿自动化,2008(2):48-50.Zhang Changsen,Dong Pengyong,Xu Jingtao.Design of personnel positioning system of mine based on ZigBee technology[J].Industry and Mine Automation,2008(2):48-50.
[9] 郭 韡,李 郴,郑 岚,等.煤矿井下人员定位系统的现状和发展[J].江西煤炭科技,2008(2):33-36.Guo Wei,Li Chen,Zheng Lan,et al.Current situation and development trend of underground personnel positioning system[J].Jiangxi Coal Science & Technology,2008(2):33-36.
[10] 陈国良,汪云甲,顾和和.感知矿山GIS监控系统关键技术研究[J].金属矿山,2011(12):98-101.Chen Guoliang,Wang Yunjia,Gu Hehe.Key technology of mine geography information system by internet of things[J].Metal Mine,2011(12):98-101.
[11] 张鹤丹,卢才武.基于WiFi的井下人员定位系统研究[J].金属矿山,2012(9):99-102.Zhang Hedan,Lu Caiwu.Research on underground personnel positioning system based on the WiFi technology[J].Metal Mine,2012(9):99-102.
[12] 马卜林,杨 帆.煤矿井下WiFi人员定位GIS系统设计与实现[J].西安科技大学学报,2012,32(3):301-305.Ma Bulin,Yang Fan.Design and implementation of WiFi coalmine personnel positioning GIS system[J].Journal of Xi'an University of Science and Technology,2012,32(3):301-305.
[13] 刘增宝,边红星,吴相闯.基于WiFi技术的井下无线通讯系统在工业以太网上的应用[J].煤炭技术,2011,30(9):32-33.Liu Zengbao,Bian Hongxing,Wu Xiangchuang.Based on WiFi technology mine shaft wireless communication system's industry ethernet application[J].Coal Technology,2011,30(9):32-33.
猜你喜欢
世界汽车(2022年6期)2022-07-13 04:25:40
云南画报(2021年4期)2021-07-22 06:17:28
中国核电(2018年4期)2018-12-28 06:28:18
世界有色金属(2018年16期)2018-11-09 05:27:14
中国公共安全(2017年8期)2017-10-13 08:12:17
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
车迷(2015年11期)2015-08-23 11:48:28
精准医学杂志(2015年2期)2015-03-20 03:15:31
新闻前哨(2015年2期)2015-03-11 19:29:25