半导体激光测距仪用双脉冲电路设计
2014-10-25 05:26周俊生邓华秋邓云龙
激光与红外 2014年8期
周俊生,徐 晓,邓华秋,邓云龙
(华南理工大学物理系,广东广州510641)
1 引言
激光测距技术开始多用于军事,现已在工业、航空航天、大地测量、建筑测量和机器人等领域获得了广泛应用。激光测距机是指利用射向目标的激光脉冲或连续波激光束测量目标距离的一种距离测量仪,脉冲半导体激光测距具有结构简单、体积小、功耗低、可靠性高、价格低等特点[1-3]。针对于对距离测量的精度要求不高的消费人群,本文设计了适用于便携的测距机使用的大电流双脉冲半导体激光器驱动电路,利用一种二值化高速数据采集方法实现了测距功能[4]。
2 单脉冲测距与双脉冲测距比较
光能的传播按指数衰减,大气对激光测距的影响使激光传输的能量衰减,接收信号减弱。远距离的光信号进入光探测器后所转化的电信号非常微弱,通常被掩盖在噪声中。信号与噪声在随时间变化的规律上是区别的,信号具有周期性,噪声具有随机性[5]。下面通过分析矩形脉冲信号频谱,用以说明采用双脉冲测距的合理性。
矩形单脉冲如图1(a)所示,其表示式为:
其中,E为脉冲幅度;τ为脉冲宽度。其连续时间Fourier变换为:即:



由图可见矩形脉冲信号在时域集中于有限范围内,然而它的频谱却以抽样函数的规律变化,分布在无限宽的频率范围上,但主要能量处于f=0范围。因而,通常认为这种信号频带B近似为1/τ。

图1 矩形脉冲信号的波形与频谱Fig.1 wave and spectrum of rectangular pulse
由于单脉冲频带过宽,用数字滤波器不易过滤大部分噪声,滤波效果不好。图2是通过Matlab对三种脉冲模拟计算结果。由于Fourier变换具有时移特性和显示尺度变换特性,因而,对图2(2-1)的双矩形脉冲,同样假设脉冲幅度为E,宽度为τ,两个脉冲之间相距时间也为τ,不难得出其Fourier变换为:

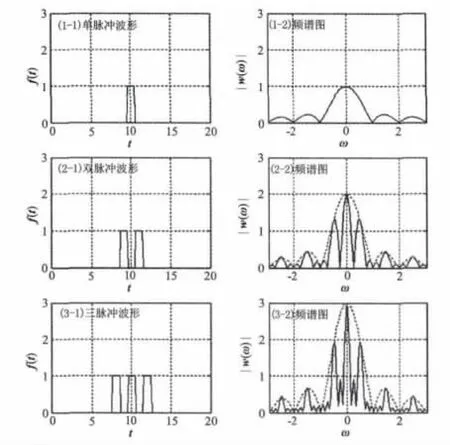
图2 几种矩形脉冲信号波形和频谱Fig.2 wave and spectrum of several rectangular pulse

可见幅度谱幅度更高,中心波长部分带宽更窄,滤波器滤波效果更好,如图2(3-2)实线。如果脉冲再增加,中心波长带宽会更窄,最后收缩为单频谱线。由于增加一个脉冲必然要增加一套高压驱动电路,考虑到电路的复杂度和成本,选用双脉冲形式。
设双脉冲间距为T,脉冲宽度为τ,把T定为τ、3 τ、5 τ,通过Matlab模拟得到幅度谱如图3所示。由图可见脉冲间距拉宽则中心波长带宽也变窄,这也有利于滤波。根据实际情况需要,选择了τ=50 ns的脉冲宽度,10τ左右的脉冲间距,100 Hz的双脉冲重复周期,脉冲中心频率为10 MHz,以利于数据采样和数字化处理。
可见其幅度谱为2倍单脉冲幅度谱和cosωτ的乘积,图形见图2(2-2)实线,其中心波长部分带宽比单脉冲窄,而幅度高一倍,这对数字滤波器滤波效果有明显提升。
对图2(3-1)三脉冲波形,同样可以得出Fourier变换为:

图3 不同时间间隔的双矩形脉冲波形与频谱Fig.3 wave and spectrum of different interval of dual- pulse
3 电路实现方案
3.1 测距电路框图
测试系统选择半导体激光器和光电接收组件,采用 CMOS功率管[6]作为激光脉冲电流驱动器,MCU使用ARM Cortex系列低功耗的嵌入式单片机STM32F051C8T6作为主控制电路,负责数据处理、输出显示和发送各种控制指令。用复杂可编程逻辑器件(CPLD)实现数字信号发送和回波数据采集以及测量通道切换,并在软硬件上采用文献[4]提出的二值化高速数据采集和处理方法。电路原理框图如图4所示。
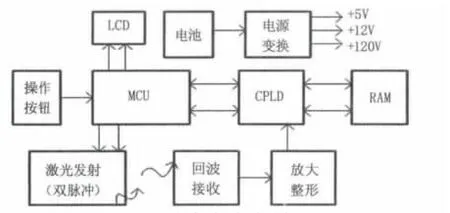
图4 双脉冲测距机电路框图Fig.4 Schematic diagram of circuit of dual- pulsed rangefinder
3.2 双脉冲大电流激光二极管驱动电路
根据要求而设计的激光器双脉冲驱动电路图如图5所示,图中MAX773为升压芯片,通过对电阻R17、R18的选择可得到130 V高压输出。由于MAX 773调制脉冲频率达300 kHz,滤波电容C 12选择耐压200 V、容量为1 μF即可。CD 4504属于数字电平转换芯片,用以提高触发电平,开关功率管采用大电流CMOS管。
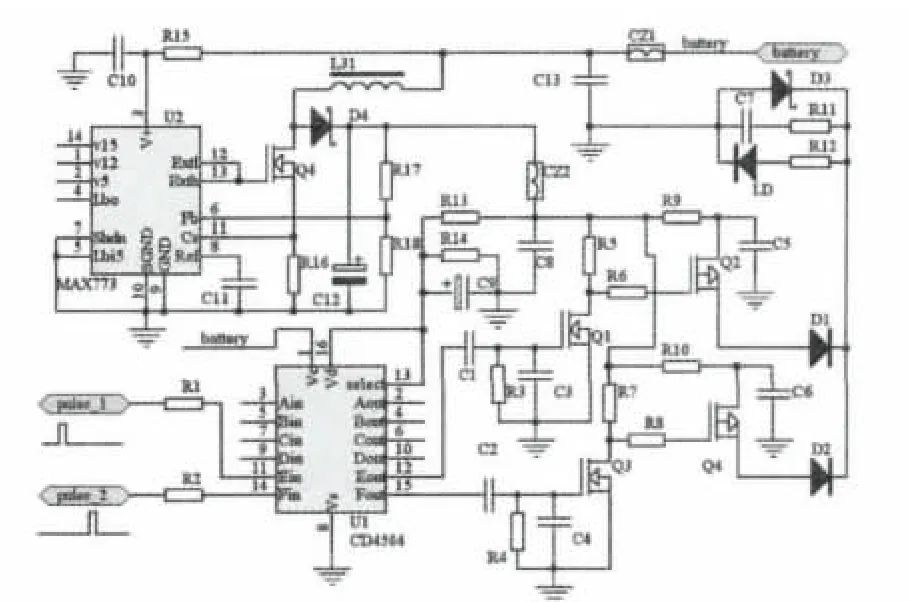
图5 双脉冲大电流半导体激光器驱动电路Fig.5 High - peak dual- pulsed driving circuit of LD
激光发射电路工作过程简述如下:
电容C12的高压通过磁珠(CZ2)接到激光器脉冲驱动电路前级上并通过电阻R9、R10分别对电容C5、C6进行充电,使电容两端达130 V电压。两个触发脉冲重复频率都为100 Hz,它们起始时间相差500 ns。触发脉冲1到来时,通过CD4504转换为高电平,使Q1导通,Q2导通,电容C5上电能通过Q2、D1、R12、LD放电,LD得到瞬间大电流脉冲。触发脉冲过后Q1、Q2马上截止,LD截止,C5重新充电。当触发脉冲2到来时,原理如上述。这样LD就获得类似于图6所示的大电流双脉冲。
图6是串联在LD上的取样电阻R12取值为1 Ω时的电压波形,可换算为LD脉冲电流,脉冲宽度为50 ns左右,电流瞬间峰值接近33 A,两个电流脉冲形状、幅度、宽度基本上保持一致。通过改变激光高压和取样电阻阻值,可以获得不同幅度和宽度的驱动电流。
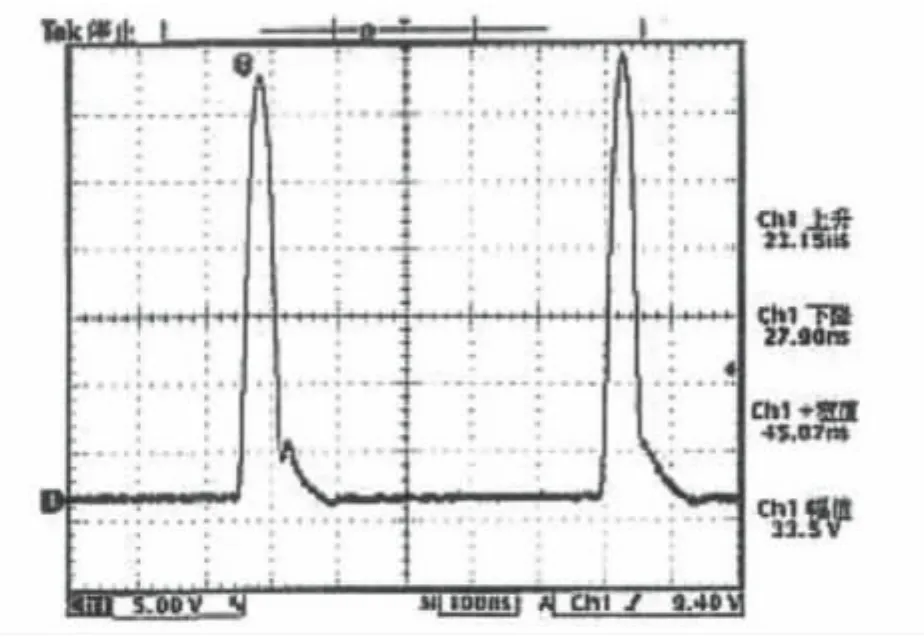
图6 双脉冲大电流波形图Fig.6 Wave of high - peak dual- pulsed current
3.3 激光回波信号分析
激光回波信号经放大后采集得到数据序列。数据序列经实验系统处理后通过Matlab作图,得到如图7所示的波形。图7中1为强干扰,它是由于激光脉冲电流的尾部振荡引起的,属周期性系统干扰,2为有效信号波形(双脉冲)。采样序列经过带通滤波后波形,得到的波形已经比较清晰,但是有效信号前面的干扰尖峰依然存在。再把序列经过差分后,强干扰峰已被削弱,信号明显比其他干扰信号高很多。图8是相关运算后得到得序列波形,通过计算出尖峰点的数值位置,通过软件直接换算就得到距离测量值。
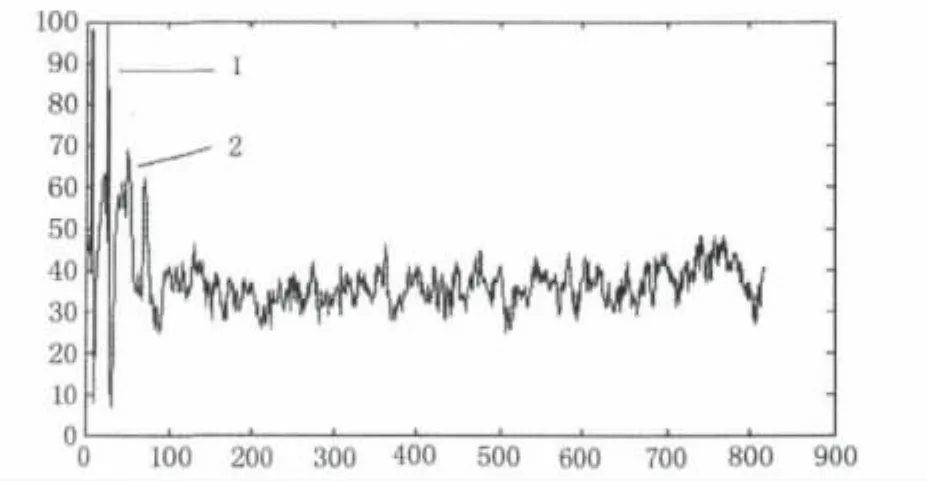
图7 采样数据变换结果波形图Fig.7 Wave of sampling sequence transform
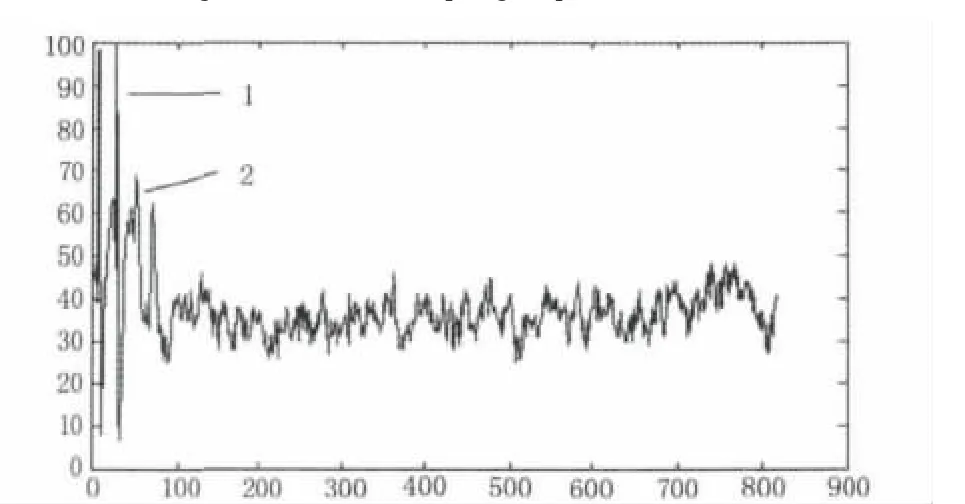
图8 采样数据相关运算结果波形图Fig.8 Wave of sampling sequence processing
4 样机与测试结果分析
4.1测距样机介绍
应用双脉冲驱动电路制作的机器整体为一台测距功能原型机。该机前面有大小两个镜头,小镜头是发射光学系统镜头,半导体激光器发射的激光经过压缩、准直后经此镜头照射到测量目标。目标反射光直接由大镜头进入,在机器内部利用光学系统把接收光分为两路,一路到目镜,另一路入射接收器。
机器侧面是LCD屏和测量按钮,为了测试方便,在显示距离的同时还显示了数据的相关度(即信号强度,大于设定统计阈值表示接收到目标回波,距离数据有效;否则距离数据无效,以“NA”代替),以此来判断激光是否照射到被测目标上。
4.2 测距数据及分析
4.2.1 近距离目标测试数据
近距离测量采用粗糙的白板为待测目标,在天气晴朗,能见度好的情况下进行测量。通过改变白板的位置,在每个位置连续测量10组数据,最后得到测量数据如表1所示。由表中数据可见,对近距离目标测量(400 m以内),基本上能达到100%的命中率,且所测数据一致性好。

表1 近距离的目标测量数据(单位:m)Tab.1 Measuring data to close distance
4.2.2 中远距离目标测试数据
表2是对远处不同目标进行测量的数据。目标1测量值的平均值为669.5 m,标准偏差为1.17 m。可见信号强度非常好,前后测量值偏差不大,测量精度非常高。而800~1100 m距离的目标(目标2、3)范围内,虽然信号强度有所下降,但机器一直能够在保持一致性的情况下测量出距离数值,而且精度还保持很高。
为了对该机器的测距能力做进一步评价,对更远的距离进行测量。在晴朗的天气、能见度特别好的情况下对三个更远的目标(目标4-6)进行测量,数据如表2所示。可见,在天气极好,能见度特高的情况下最大测距距离可到1750 m(命中率30%左右)。

表2 中远距离目标测量数据(单位:m)Tab.2 Measuring data to far distance
5 结论
测量结果显示,在无合作目标的情况下,整机系统达到测量范围1.1 km,测量精度±3.75 m的要求。在天气极好,能见度特高的情况下最大测距距离可到1750 m。这说明采用双脉冲大电流驱动测距方案,具有功耗低、目标测试稳定、测量数据准确、测量距离远、命中率高等特点,具有实际使用价值。
[1] YU Yanmei.LD rangefinder and development trend[J].Information Command Control System and Simulation Technology,2002,8:19 -21.(in Chinese)于彦梅.激光测距机及发展趋势[J].情报指挥控制系统与仿真技术,2002,8:19 -21.
[2] LIU Feng.Development and application of the pulsed LD rangefinder[J].Infrared and Laser Engineering,2003,32(2):118 -122.(in Chinese)刘锋.脉冲半导体激光测距机的研制及应用[J].红外与激光工程,2003,32(2):118 -122.
[3] ZHANG Zaixuan,YU Xuangdong.Low cost mini LD laser rangefinder[J].Laser & Infrared,1999,29(1):21 - 23.(in Chinese)张在宣,余向东.小型低价LD激光测距仪[J].激光与红外,1999,29(1):21 -23.
[4] LIU Neng,XU Xiao,DENG Huaqiu,et al.Study on a new method for high-speed data acquisition of periodic signal[J].Chinese Journal of Scientific Instrument,2007,28(4):765 -768.(in Chinese)刘能,徐晓,邓华秋,等.一种新的周期信号的高速数据采集方法研究[J].仪器仪表学报,2007,28(4):765-768.
[5] PING Qingwei.Study on digital signal processor of the high resolution middle and long range laser ranger[J].Laser& Infrared,2003,33(8):261 - 264.(in Chinese)平庆伟.高分辨中远程激光测距机的数字信号处理研究[J].激光与红外,2003,33(4):261 -264.
[6] WEI Jin.Studyon high - speed pulsed laser by MOS power driving[J].Semiconductor Optoelectronics,2002,23(3):195 -197.(in Chinese)魏进.MOS功率驱动高速脉冲激光器的研究[J].半导体光电,2002,23(3):195 -197.
猜你喜欢
数学物理学报(2022年3期)2022-05-25
中国特种设备安全(2021年9期)2021-03-02
科学(2020年3期)2020-01-06
数学物理学报(2019年5期)2019-11-29
测控技术(2018年2期)2018-12-09
中成药(2017年12期)2018-01-19
电子制作(2017年7期)2017-06-05
通信电源技术(2016年3期)2016-03-26
焊接(2016年5期)2016-02-27
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01