
主动声呐的多假设跟踪算法研究
2014-10-22 06:58:54孙旭李然威胡鹏
声学与电子工程 2014年3期
孙旭 李然威 胡鹏
(第七一五研究所,杭州,310023)
在演习对抗时,利用主动声呐发现潜艇目标的能力往往小于声呐发现距离的标称值,其中一个主要的原因是:在演习对抗时,声呐兵没有先验目标的距离和方位信息,而由于海底的不均匀性、海面的起伏、鱼群等的反射影响以及海洋中存在的声干扰(我们统称为“杂波”-Clutter),使得主动声呐在目标检测时,伴随着大量的虚警,虚警数目过多会导致声呐兵目标判决困难,难以发现真正目标所在,从而造成漏报率大幅增加。因此,杂波引起的高虚警问题是主动声呐在浅海工作时面临的最主要挑战之一,如何抑制杂波、最大程度地降低虚警率是工程关注的焦点。
基于目标的时空连续性而发展起来的数据关联方法可以有效的解决当前主动声呐检测面临的高虚警问题。在没有杂波干扰条件下,传统的数据关联算法,如最近邻(NN)算法,可以取得较好的关联效果,而当目标处于杂波区,NN算法将统计距离最短的点作为关联点,可能导致关联错误率升高,跟踪不稳定。Reid首先提出了用于红外成像目标跟踪的多假设跟踪(MHT)算法[1],该算法在关联出现模糊时,生成多个假设以延迟关联判定。在杂波环境下,MHT是最优的数据关联算法[2]。多假设跟踪(MHT)是一种基于多批量测,进行数据互联的方法,主要解决主动声呐浅海工作面临的高虚警问题。
1 MHT原理
MHT是基于“全邻”最优滤波器和Bar-Shalom的聚概念提出的。该方法考虑在每个扫描周期回波来自现有目标、杂波或新目标等各种情况的可能,构造面向量测的关联假设树,在数据关联发生冲突时,形成多个假设延迟作逻辑判定的决策。利用贝叶斯后验概率的传递特性,对假设树的各个分枝进行概率的计算和评估,不断反复“修剪”小概率不可能的假设,合并相同的假设,较好地适应密集杂波环境下的多目标跟踪。
1.1 假设生成
假设是某个小区域内一组目标与量测的互联分配关系,每个这样的小区域都包含一个假设群,假设群中的每个假设都代表一条可能的航迹。在对一个假设群内目标与量测进行关联生成假设的同时更新假设群中每个假设的概率和目标的状态。为后续表述方便,先给定以下记号:

表示k时刻量测集合;

表示k时刻的积累量测集合;

表示k时刻的关联假设集。
Ωk中的假设由k−1时刻的关联假设集 Ωk−1与当前量测集Z(k)关联得到的。对于量测 Zm(k)存在三种可能的互联:
1)量测 Zm(k)已有某个航迹的继续;
2)量测 Zm(k)由新目标产生,起始一条新航迹;
3)量测 Zm(k)源于虚警。
每个目标至多与一个落入跟踪门内的当前量测关联。
1.2 假设概率计算
记关联事件θk为描述当前量测与目标之间的对应关系,设 Θk,l表示关联假设集 Ωk中的第l个假设,由假设生成的概念,它由 Ωk−1中的某个假设Θk−1,s和关联事件组合得到,即

利用Bayes公式,假设 Θk,l的后验概率为
如果量测zk,i源于一条已建立的航迹,其服从高斯分布,记ti为与量测zk,i关联的目标编号;若量测zk,i源于杂波或虚警,则其在跟踪门内服从均匀分布,概率密度为 V−1;若量测zk,i源于一新目标,也假设其服从跟踪门内的均匀分布,则

其中Λk,i代表新息的似然函数,

而
1.3 假设管理
在MHT算法中,可行联合假设的个数随着目标以及杂波数目的增加呈指数增长,因此,MHT技术的关键在于假设管理的有效实现。本文采用K-best最优假设和N-scan回溯剪枝方法进行假设生成和轨迹树剪枝以控制算法复杂度。
1.3.1 K-best最优假设
K-best最优假设产生方法[4]是不列举所有假设的情况下,把K个置信度最高的假设列举出来的方法。基于假设的当前及历史量测点迹与航迹预测点的统计距离信息,搜索前K个置信度最高、概率最高的关联假设,并赋给该K个假设内存,等待下一次调用。
1.3.2 N-scan回溯剪枝
N-scan剪枝法[5]是一种通过限制轨迹树深度来控制假设数量的方法。N-scan剪枝方法强制在k时刻产生的不确定性在k+N时刻延迟解决。当轨迹树的深度大于N时,N-scan剪枝法将搜索轨迹树中当前置信度最高的叶子节点,然后将置信度最高的叶子节点所在的根节点分枝保留,删除其余分枝。
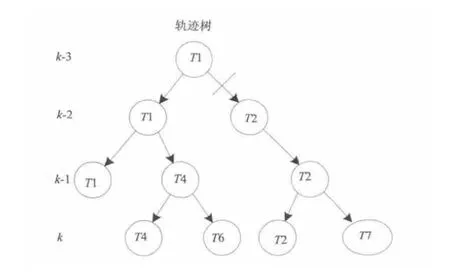
图1 N-scan回溯剪枝
图1中,取N=3,在k时刻轨迹树执行N-scan剪枝操作,假设当前叶子节点 T6所在假设置信度最高,则保留轨迹树中T1、T4、T6组成的分枝,删除k−3时刻根节点T1的后继节点及子节点,k−2时刻的节点T1成为新根节点。此时,k−3时刻的节点 T1及其前驱节点构成的序列被认为是所期望的目标航迹,输出给显控和指控。
2 算法的工程实现
在主动声呐的目标检测中经常遇到的一个问题是:连续多次的扫描中有几次目标存在而没有检测到,即量测断续。量测断续问题的存在限制了MHT算法在主动声呐中的应用。
针对MHT算法面临的量测断续问题,本文基于跟踪获取的目标运动信息提出M-break断续标记方法实现断续目标跟踪。
M-break断续标记是一种以航迹预测点代替量测点来处理量测断续问题的方法。当前一时刻的某条假设没有与当前批次的量测点关联上时,该假设当前的状态滤波值用状态预测值取代,归一化新息取该假设前 N次的均值;而在该假设连续出现 M次断续时,删除该假设。
MHT算法的主要环节包括:关联假设生成、递推滤波、假设管理等,算法流程如图2。
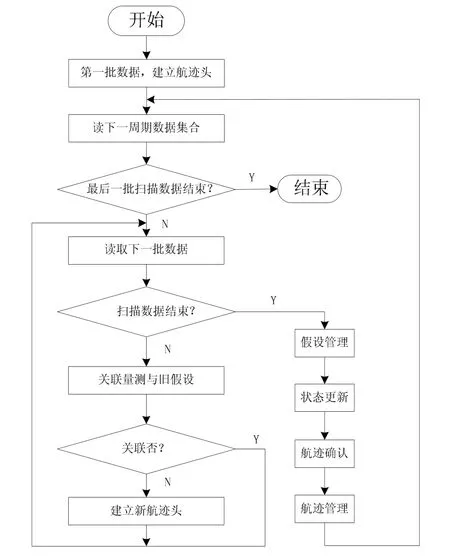
图2 MHT算法流程
3 算法仿真
仿真环境:设置三个匀速运动目标,其中一个目标存在量测断续,断续点按检测概率PD=0.9的规律产生。声呐测向误差取 σθ=1º,测距误差取σr=0.01×R±50 m,其中R为目标距离。每个批次随机产生20个杂波点。
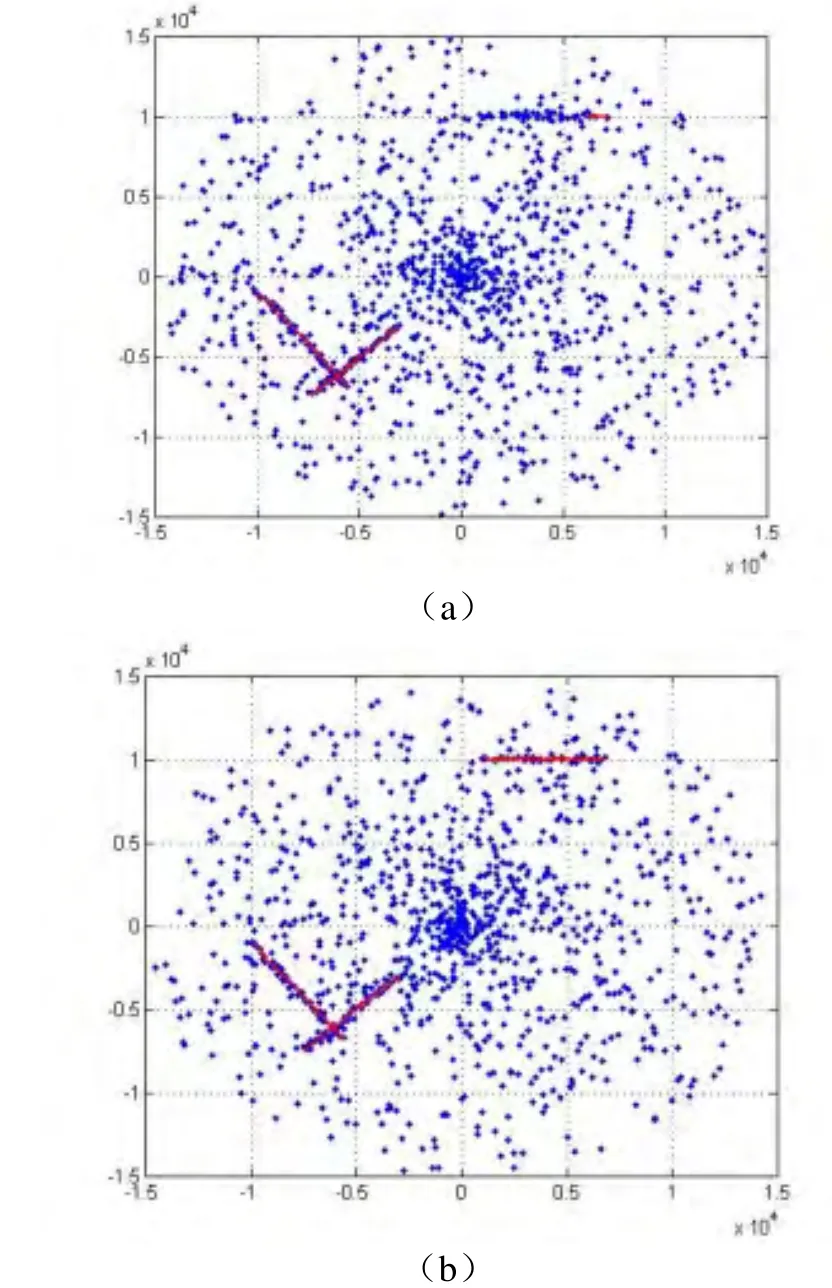
图3 MHT算法的目标跟踪曲线
图3(a)为没有采用断续标记方法跟踪的效果图,设置量测断续的目标出现了跟丢的情况,图中的一小段红线是跟丢后又重新起跟的航迹。图3(b)为采用断续标记方法跟踪的效果图,没有出现跟丢的情况。由此可见,采用M-break断续标记方法可以实现断续目标跟踪,同时也表明该算法可以较好的适应密集杂波环境的目标跟踪问题。
4 海试数据分析
本文选用某课题录取的海试数据验证所提算法性能做算法的应用分析,试验中主动声呐的测向误差和测距误差分别为σθ、σr,其中R为目标距离。图4为试验预设的目标航路,试验中目标绕本船以半圆弧形运动,距离为5 km左右。MHT算法参数取值:K-best最优假设数取16,N-scan回溯剪枝值取4,M-break断续标记值取2。
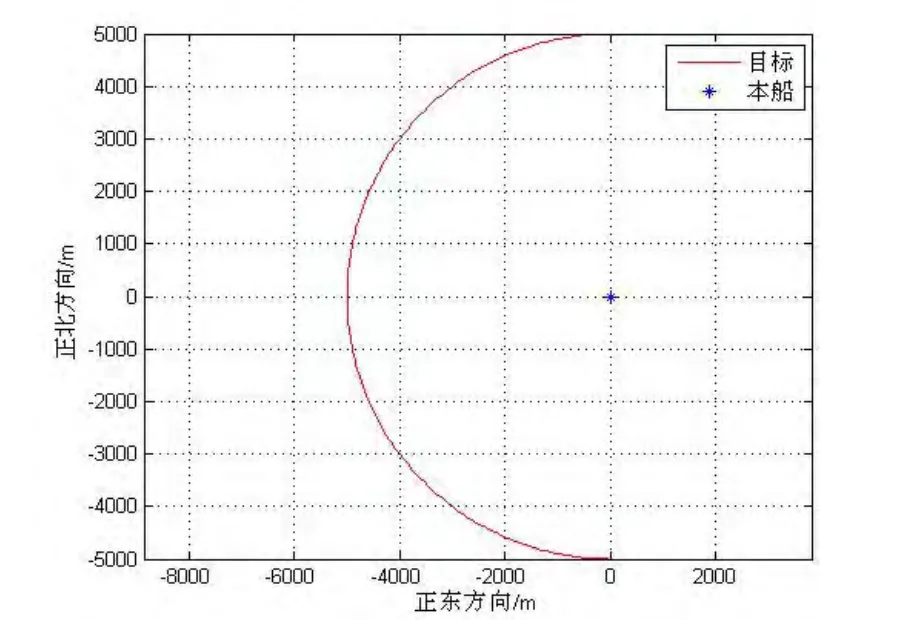
图4 试验预设的目标航路
试验的1到4批量测点如图5所示,每批数据在坐标点(0,−5000)附近都有回波,即目标具有时空连续性,而杂波在探测区域内则是随机分布的。MHT算法就是将这些具有时空连续性的回波提取出来,而无规则的杂波则被排除。
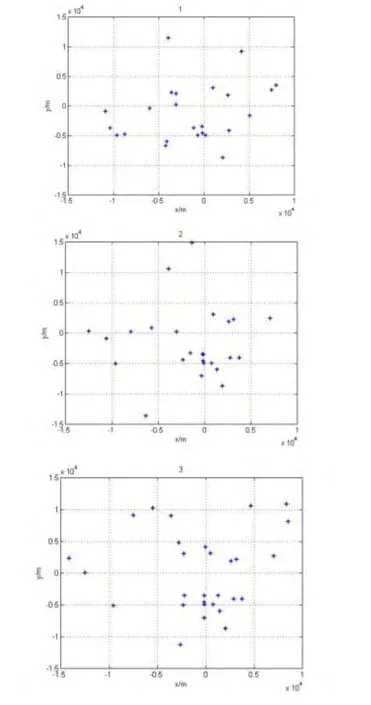
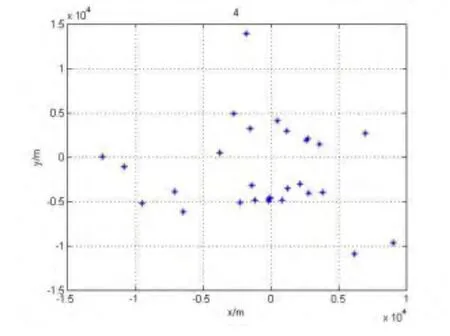
图5 单批的量测点
通过MHT算法跟踪检测前四批数据后,确认航迹如图 6,图中坐标点(0,−5000)附近平行于横轴方向的一小段红线即为目标,这时杂波在很大程度上被抑制。
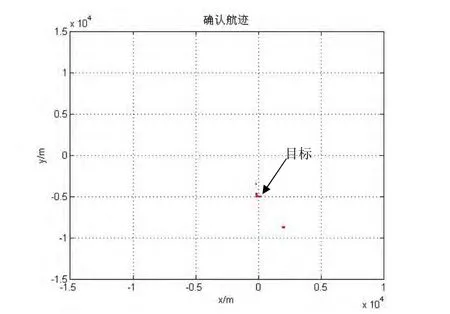
图6 前四批量测数据起始的航迹
图7是前40批数据的跟踪效果局部图,图中蓝颜色的点表示前40批数据得到的量测点,红色实线表示关联跟踪得到的目标航迹,坐标点(0,−5000)附近是目标的航迹起始位置,坐标点(−2700,−4200)附近是目标的航迹终结位置。通过实际海试数据分析验证,表明MHT算法有效的抑制杂波,降低虚警率,实现杂波环境下的目标跟踪。
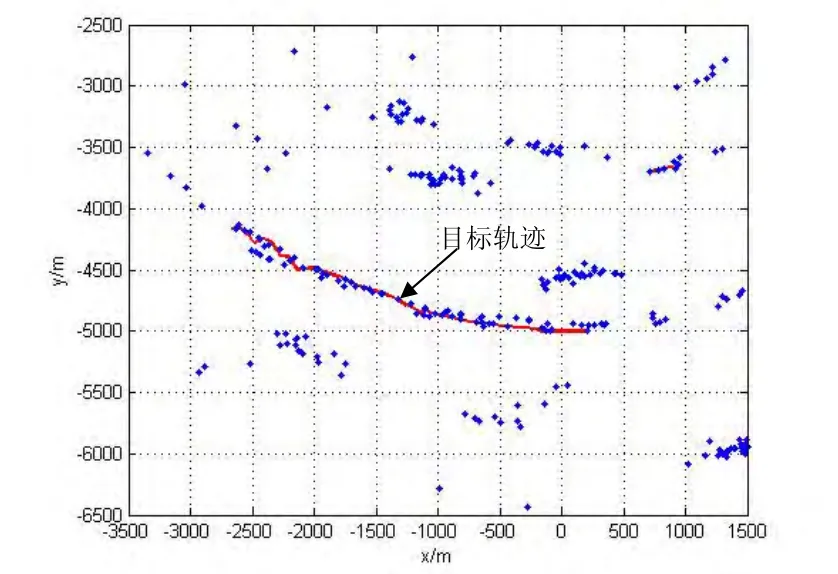
图7 基于MHT的目标跟踪曲线
5 结束语
本文采用K-best最优假设和N-scan回溯剪枝方法控制 MHT核心算法的复杂度,提出 M-break断续标记实现断续目标跟踪。通过算法仿真和海试数据分析,表明算法可以很好的应对主动声呐在浅海工作面临的高虚警率的挑战,实现杂波抑制。
[1]REID D B. An algorithm for tracking multiple targets [J].IEEE Transaction on Automatic Control,1979,24(6):843-854.
[2]楼晓祥,郑浩. 基于多假设目标跟踪算法[J]. 指挥信息系统与技术,2012,36(6):36-39.
[3]何友, 修建娟, 张晶炜, 等. 雷达数据处理及应用[M].北京: 电子工业出版社, 2013:171-174.
[4]CHANG SANGHYUN, SHARAN RANGOLI. People tracking with UWB radar using a multiple-hypothesis tracking of clusters method[J]. Int J Soc Robot,2010(2): 3-18.
[5]STEFANO CORALUPPI, CRAIG CARTHEL. Undetected target births in multiple-hypothesis tracking[C]. The 16th International Conference on Information Fusion , 2013.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
保健医苑(2022年5期)2022-06-10 07:47:22
科学与信息化(2021年30期)2021-12-24 08:00:20
成都信息工程大学学报(2021年6期)2021-02-12 03:00:54
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
天津诗人(2017年2期)2017-03-16 03:09:39
西北工业大学学报(2015年3期)2015-12-14 13:08:44
遥测遥控(2015年2期)2015-04-23 08:15:22
声学技术(2014年1期)2014-06-21 06:56:32
