
嫦娥三号软着陆轨道设计
2014-10-21 20:02冷建华
山东工业技术 2014年24期


摘 要:通过建立坐标系,将三维立体图转化成二维的平面图,结合椭圆方程,利用开普勒定律和能量守恒定律,分析得到嫦娥三号着陆准备轨道近月点、远月点的位置,近月点的速度、远月点的速度,为嫦娥三号软着落提供有效保障。
关键词:嫦娥三号;软着陆;轨道设计
0 引言
嫦娥三号于2013年12月2日1时30分成功发射,12月6日抵达月球轨道。嫦娥三号在高速飞行的情况下,要保证准确地在月球预定区域内实现软着陆,关键问题是着陆轨道与控制策略的设计。其着陆轨道设计的基本要求:着陆准备轨道为近月点15km,远月点100km的椭圆形轨道,着陆轨道为从近月点至着陆点。本文通过建立坐标系,确定着陆准备轨道近月点和远月点的位置,并计算出嫦娥三号相应速度的大小与方向。
1 软着陆轨道位置和速度模型分析[1-3]
为了同环月运动的参考系一致,同时便于对软着陆下降窗口进行分析,需要将着陆器的运动表示在月心赤道惯性坐标系下。利用软着陆下降轨迹设计的一个结论:软着陆下降轨迹平面在环月停泊轨道平面内。可将月心赤道惯性系下的着陆器位置表示出来。通过建立月面坐标系的三维立体图及二维平面图,得到运动轨迹椭圆方程。依据其相关关系可求出着陆准备轨道近月点和远月点的位置。
根据开普勒第二定律,嫦娥三号在椭圆轨道上环绕月球运动时,单位时间内,嫦娥三号与月球球心的连线扫过的面积是一个固定值。这也就意味着,嫦娥三号在某个点的速率大小与该点到月心(不是月球表面)的距离的乘积是个固定值。由于嫦娥三号绕月球的轨道是由圆形轨道变为椭圆形轨道,借助开普勒定律、能量守恒定律求解出近月点及远月点的速度。
2 位置模型及求解
为了同环月运动的参考系一致,同时便于对软着陆下降窗口进行分析,需要将着陆器的运动表示在月心赤道惯性坐标系下。利用软着陆下降轨迹设计的一个结论:软着陆下降轨迹平面在环月停泊轨道平面内。可将月心赤道惯性系下的着陆器位置表示出来。建立月面三维立体图及相对应二维平面图如下图1,图2所示。
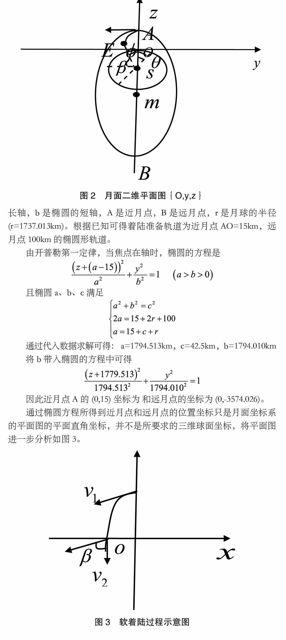
:为月球赤道平面与嫦娥三号卫星最后阶段自由落体的曲线所围成的夹角。椭圆轨道的圆心为m,s是椭圆的焦点,a是椭圆的长轴,b是椭圆的短轴,A是近月点,B是远月点,r是月球的半径(r=1737.013km)。根据已知可得着陆准备轨道为近月点AO=15km,远月点100km的椭圆形轨道。
由开普勒第一定律,當焦点在轴时,椭圆的方程是
且椭圆a、b、c满足
通过代入数据求解可得: a=1794.513km,c=42.5km,b=1794.010km
将b带入椭圆的方程中可得
因此近月点A的(0,15)坐标为 和远月点的坐标为(0,-3574.026)。
通过椭圆方程所得到近月点和远月点的位置坐标只是月面坐标系的平面图的平面直角坐标,并不是所要求的三维球面坐标,将平面图进一步分析如图3。
利用切线的斜率:β=59.4162°
由于嫦娥三号着陆点的位置为(19.51°W,44.12°N),且经纬度就是圆周360度的角度 。因此可得: =44.12°
依据θ= -(90°-β)可得:θ=13.5362°
由近月点在椭圆轨道的这个平面与所选嫦娥三号的着陆月球点的月球面共面,嫦娥三号的着陆点的位置为(19.51°W,44.12°N),所以近月点的位置为(19.51°W,13.54°N)高度相对于月球表面为15km ;远月点的位置为(160.49°E,13.54°S)高度相对于月球表面为100km。
3 速度模型及求解
假设卫星在运动过程中,不考虑其他星体对它的作用,即机械能守恒。根据开普勒第二定律,嫦娥三号在椭圆轨道上环绕月球运动时,单位时间内,嫦娥三号与月球球心的连线扫过的面积是一个固定值。这也就意味着,嫦娥三号在某个点的速率大小与该点到月心(不是月球表面)的距离的乘积是个固定值。设近月点速率大小为vA,距离月心为r1;远月点速率大小为vB,距离月心为r2,那么
vA·r1=vB·r2
以无穷远处为势能零点,由机械能守恒,那么近月点嫦娥三号的势能为,远月点嫦娥三号的势能为(G=6.67×10-11N·m2/kg2为引力常量,M=7.3477×1022kg为月球质量,m=2400kg为嫦娥三号质量),而近月点嫦娥三号的动能为,远月点嫦娥三号的动能为,因此
如图4所示,r1=a-c,r2=a+c,A、B两点为卫星运动轨道上的近月点和远月点,vA、vB分别表示卫星在这两点的速度。
代入相关数据可得:
vA=1.692km/s,方向平行于y轴负半轴
vB=1.613km/s,方向平行于y轴正半轴
所以得到近月点的速度为1.692km/s,远月点的速度为1.613km/s,方向都为椭圆轨道的切线方向,两点方向相反。
4 结论
通过将三维空间转化为二维平面研究,通过建立椭圆方程,使研究变得直观。计算得到结果与嫦娥3号飞行器近月点、远月点位置以及运行速度相符。为嫦娥三号软着落提供有效保障。
参考文献:
[1]徐敏,李俊峰.月球探测器软着陆的最优控制[J].清华大学学报(自然科学版),2001,41(08):87-89.
[2]王鹏基,张熇,曲广吉.月球软着陆飞行动力学和制导控制建模与仿真[J].中国科学,2009,39(03):521-527.
作者简介: 冷建华(1978—),男,江西高安人,讲师,硕士,研究方向:计算机仿真。
