深水定位系泊系统关键设备的三链轮锚机控制操作研究
2014-10-17 03:57:53胡晓东付万里金新平
机电设备 2014年6期
顾 炳,胡晓东,刘 贺,付万里,金新平
·(1.中船重工第七○四研究所,上海 200031;2.江阴双马重工装备有限公司,江苏 江阴214408)
深水定位系泊系统关键设备的三链轮锚机控制操作研究
顾 炳1,胡晓东1,刘 贺1,付万里1,金新平2
·(1.中船重工第七○四研究所,上海 200031;2.江阴双马重工装备有限公司,江苏 江阴214408)
定位系泊系统作为深水半潜式钻井平台的关键设备之一,已广泛应用于深水平台的作业中。介绍了深水定位系泊系统关键设备——三链轮深水定位锚机的主要组成及功能,尤其对它的操作界面及操作流程等进行了重点说明和研究。
深水定位泊系统;三链轮锚机;控制操作流程
0 引言
深水定位系泊系统作为深水半潜式钻井平台关键设备之一,具有结构简单、可靠、经济性好等特点;与用于水深较浅的定位系泊系统相比,深水定位系泊系统关键设备——定位锚机结构更加复杂,要求更高、更严格;同时锚机操作控制程度也较一般的定位锚机要复杂,其检测点和控制参数量多。
《大型海洋工程设备深水定位系泊系统研制》项目主要内容是研制一套1:1的、1500m水深并完全具有知识产权的半潜式钻井平台三链轮定位卧式电动锚机样机。通过介绍锚机样机的组成和功能原理,基本掌握深水定位锚机基本操作,对开发深水定位系泊系统以及实现国产化具有十分重要的意义。
1 锚机主要技术指标
锚机的主要技术指标为:
(1)锚机类型:三链轮卧式电动锚机。
(2)锚链直径:Ø84(R5)mm,有档焊系泊链。
(3)工作负载与速度:①齿轮箱低速档:2694kN和9m/min;1200kN和18m/min;②齿轮箱高速档:980kN和25m/min;430kN和50m/min。
(4)电机堵转(过载)时锚机负载:3367kN(~40%的锚链破断负荷)。
(5)盘式制动器制动时锚机负载:4200kN(~50%的锚链破断负荷)。
(6)锚机支持负载:8418kN(锚链破断负载)。
2 锚机主要组成、功能及使用介绍
2.1 锚机主要组成
三链轮卧式电动锚机由三套锚机本体装置、一套传动装置、一套液压泵站以及一套电控系统组成[1]。锚机具体组成清单见表1,结构总图见图1,系统功能组成见图2。
锚机电控系统原理图和控制框图见图3、4。

表1 锚机组成

图1 锚机结构总图和实物

图2 锚机功能组成框图

图3 锚机电控系统原理图

图4 锚机电控系统控制框图
现场控制盘及操作面板如图5所示。通过功能选择,可以实现对锚机的全功能控制,并具有状态检测功能,实时发出报警信息。通过面板上的液晶屏幕实时显示锚机的工作状态,电压、电流、功率等电气参数;液压系统的压力、温度、液位等液控参数;水温、水压等冷却水系统参数。

图5 现场控制盘及操作面板
2.2 锚机主要功能
锚机主要功能包括:锚泊定位时能调整锚;抛锚时能能够快速抛出锚链;对锚索的预紧有非常高的拉紧力,带有测力装置,通过控制可调整锚链张力;航行或拖航时能应急锚泊;在紧急状态下能应急释放。
2.2.1 动力起抛锚
平台复位调整位置或平台需要撤离起锚时,锚机进行起抛锚作业。起抛锚过程中,等所有程序和检测到位后,让需要动作的锚机离合器合上,便可扳动操作手柄进行作业。起抛锚过程中,锚链的张力、长度、速度等信息实时显示。起锚工况若锚链张力比较大,变速齿轮箱必须挂在低速档;当锚链张力比较小时,变速齿轮箱可以挂高速档。起锚过程中不允许离合器脱开,或者变速齿轮箱换挡,必须在电机停止以后进行操作。
2.2.2 抛锚
深水定位锚机一般采用预抛锚的方式,在平台就位前由工作船在海底预先抛下锚索和锚,平台装置就位后,锚链舱的锚链由工作船拖出,和预先抛好的锚索相连接就可以了。抛锚时靠水冷刹车来控制锚链抛放速度。
另外一种抛锚方式为手操自抛锚,平台可以在航行或者拖航状态下,遇到紧急情况需要停航时抛1~2根锚链供平台停泊使用。液压泵站能正常工作或者蓄能器能正常工作,通过液压系统电控系统或UPS打开阀组,打开带式刹车控制锚链下放速度。
2.2.3 应急释放
当平台遭遇最大风暴、恶劣环境条件,锚链张力超过设定值时;或者有失常船舶撞向平台,此时锚链应急释放功能开启,离合器脱开,带式刹车松开,放出锚链。应急释放的最终目的一般就是快速弃链。
2.2.4 各种功能下锚机动作情况说明
锚机在不同工况下(以锚机本体装置CUR为例说明),各装置相应动作情况及状态见表2。
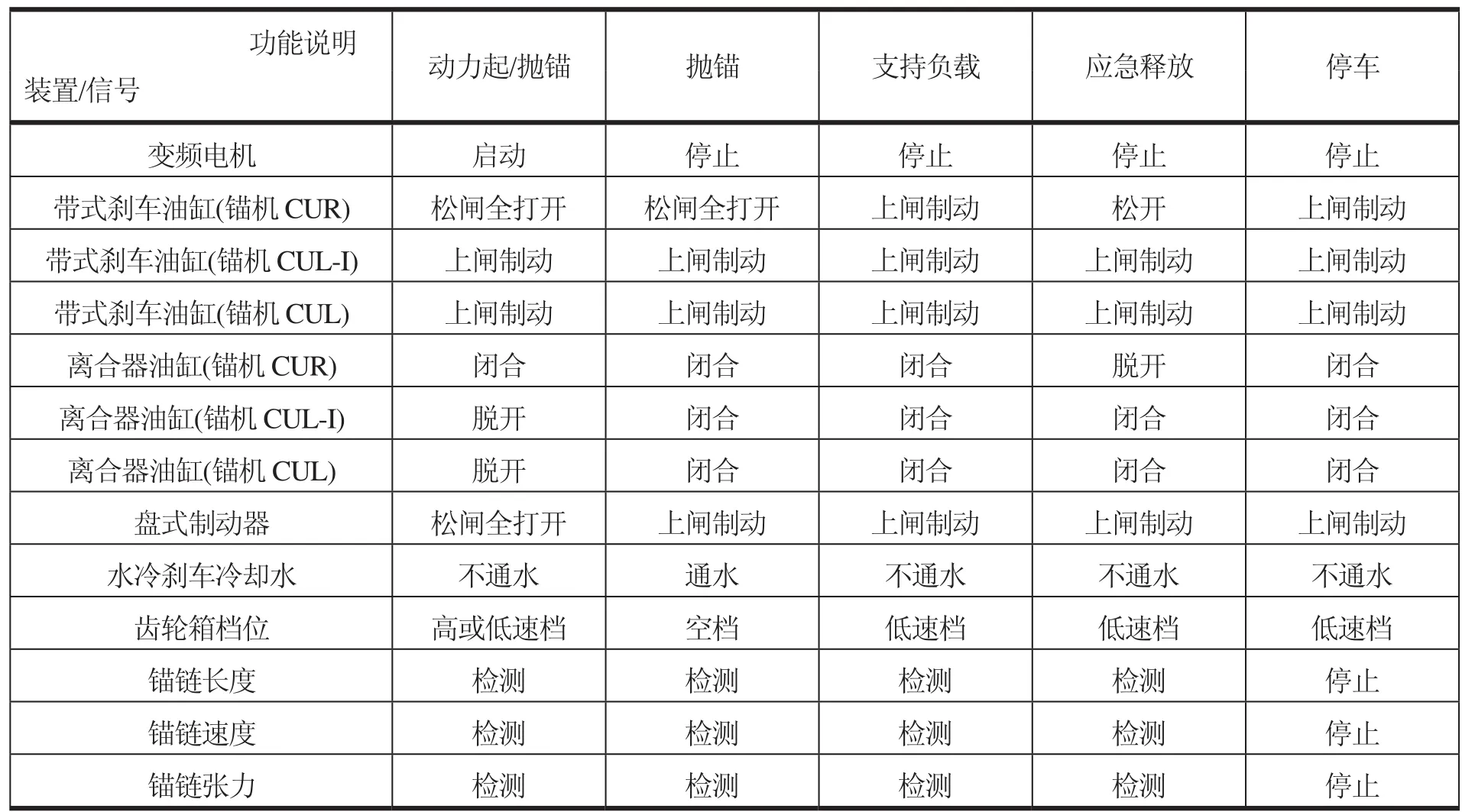
表2 单台锚机动作(以锚机CUR为例)情况
2.3 锚机使用说明
2.3.1 送电检查
设备在较长时间(一般为30天)没有通电运行时,在送电前应进行检查。 检查内容包括主电路电缆连接是否牢固,测试主电路的绝缘电阻,绝缘电阻应大于10MΩ,元器件上无明显的灰尘和凝露;确认无滴水、喷水及水珠凝结。
2.3.2 系统上电和自检
(2)在接通启动箱电源前,确认箱体内的开关处于接通状态,电控箱和液压泵站、现场控制盘等处于带电状态。在初次调试时,应先接通启动箱总电源,再逐个接通每一部分的电源。
(3)通过启动箱和液压机组上的控制按钮启动液压泵站,检查液压泵站的运行情况。确认液压泵运行平稳,管路压力正常,没有滴漏现象发生。
(4)观察现场控制盘上的工作指示灯和液晶屏显示的状态,当发生报警时,应及时处理。
2.3.3 PLC控制系统
安装在电控箱内的PLC系统由一台S7300CPU314C-2DP和开关量模块、模拟量模块FM350编码器计数模块组成。这组PLC是锚机控制系统的主站,通过PROFIBUS-DP连接液压泵站、现场控制盘和变频器驱动器,实现系统集成控制[2]。同时与中央集中控制台连接接受中央集中控制台的指令,完成集控和联控功能。
在PLC上电后首先通过PROFIBUS-DP连接线检测连接主站和从站的工作状态,在连接正常进入运行状态;连接异常时,PLC系统发出报警信号,应依照提示故障信息及时处理。
系统诊断模块对通讯状态进行检验,当检测状态正确时,进入系统工作准备状态;当检测发现错误时,检测程序发出通讯报警信号,等待对报警状态进行处理,系统运行后,实时进行FROFIBUS数据交换和共享
本次调查中发现静脉给药发生严重ADR/ADE的比例最高。静脉给药后药物可直接进入血液循环迅速达到峰浓度。输液剂的渗透压、药物浓度、内毒素、微粒等都可引起严重ADR/ADE。配置或静脉给药过程无菌操作是否规范,操作环境、滴注速度是否合适也是影响因素之一[9]。世界卫生组织首先推荐口服给药,其次为肌肉注射、静脉给药。临床医生制定给药方案时,尽量给患者选择口服给药,避免静脉给药。
PLC功能检测模块对系统的初始状态进行检测,当检测状态正确时,进入系统工作准备状态;当检测发现错误时,检测程序发出报警信号,等待对报警状态进行处理。
PLC控制系统主要包括下列控制模块:
(1)液压泵站控制程序:响应液压泵站的检测信号指令,发出动作执行指令。
(2)变频器控制程序:响应变频器的控制指令,发出响应的执行指令。变频器动作控制程序主要在系统调试时使用,在电控箱上,控制调整变频器实现变频电机的正转、反转和停止,显示变频器的工作状态,对变频器报警响应和复位。
(3)张力采集程序:实时采集三个锚链轮上锚链张力信号,记录在数据块。
(4)编码器采集程序:采集三个锚链轮上的编码器信号,记录锚链长度的数据,实时计算锚链速度。
(5)通讯程序:实现主站与从站以及集控中心之间的通讯和数据交换。
(6)系统联动控制程序:当操作人员通过现场控制盘上的按钮、转换开关、操纵手柄进行操作时,控制程序依照控制逻辑关系,发出组合控制盘指令,实现装置的功能性操作。
(7)显示处理程序:PLC系统对锚机工作状态、张力数值、锚链长度、运行速度、液压机组工作状态、减速箱的工作状态等信息实时检测,并将数据处理后,传递到液晶屏实时显示。
(8)液晶屏WINCC组态:液晶屏通过MPI接口与PLC连接,实时接受PLC的数据,在液晶屏上由WINCC编写设计良好的人机界面,包括状态显示、系统设置、基本功能控制、报警显示和记录等。同时WINCC组态软件中包括比较丰富的帮助文档,使用者可以方便地获得帮助信息,更好地完成锚机的操作和控制[3]。
2.3.4 基本控制功能
电源总开关在启动箱上,使用设备时,首先合上电源总开关。
在电控箱有一组变频器控制按钮和指示灯。操作这些按钮可以对变频器进行控制,电控箱上的按钮用于变频器动作控制,仅在系统调试时使用。按下正转按钮,变频器输出正转控制指令,变频电动正转,正转指示灯亮;按下反转按钮,变频器输出反转控制指令,变频电动反转,反转指示灯亮;当变频器发生故障时,变频器故障报警指示灯量,按下故障复位按钮,可进行故障复位。
电控箱上的正转和反转按钮,与所有的刹车制动、离合状态没关联和连锁,在操作时,应将刹车制动器、离合器调整到相应的状态。
在电控箱上,有液压泵站启动和停止开关,在电控箱上可以操作液压泵站。
液压泵站有独立的电控柜,在分系统调试时,使用电控柜操作面板可对所有的液压执行部件进行控制。当液压泵站的PLC控制系统与电控箱中的PLC控制系统通过PROFIBUS-DP连接后,液压泵站的PLC作为一个从站,接受主站的控制指令,向主站发送检测和报警信号。此时操作面板上除液压泵站的启动、停止和急停外其他操作功能将被屏蔽。
2.3.5 整机操作控制
正常情况下,通过现场控制盘对锚机进行操作。现场控制盘的操作面板上包括以下内容:
(1)数字显示仪表:数字仪表采用易于识别判断的彩色显示屏,它根据数值的区间可以在红绿之间转换。数字显示仪表接受PLC的数据,在系统运行是可以显示拉力/速度/长度。
(2)控制全转换开关:选择控制权限。当选择现场控制方式时,使用现场控制盘操作锚机;当选择中央控制方式时,使用集控中心控制方式操作锚机;当选择调试方式时,用于调试和维修调整。
(3)离合器控制转换开关:选择离合器控制方法。选择联动方式时,离合器随操作手柄和控制指令分开和啮合。离合器转换开关上有操作钥匙,操作人员不可随意操作,正常情况下,设置在联动方式。
(4)操作状态设置按钮:分别设置CUR,CUL-I、CUL三组锚机的操作方式,三组按钮分别设置三个锚机的操作,对于电机操作方式每次只有一个控制功能有效,三组停车控制同时有效。
(5)指示灯和按钮:设置和显示齿轮箱的档位状态。
(6)电源开关:接通或断开现场控制盘的电源。
(7)紧急停止按钮:在出现非正常危险状态时,按下紧急停止按钮,设备停止运行,所有装置处于安全停止状态。
(8)紧急释放按钮:在装置处于停车状态时,当出现极度危险情况,按下紧急释放按钮,快速放出锚链。
(9)液晶屏:由WINCC组态,通过MPI接口与PLC连接,实时接受PLC的数据,在液晶屏上有人机界面,包括状态显示、系统设置、基本功能控制、报警显示和记录等。
(10)操纵手柄:控制锚链的收放。手柄前推时,放出锚链;后拉时,收回锚链。手柄的推拉角度,决定收放速度。在自由抛锚时,推出手柄,实现自由抛锚,手柄回到中位,抛锚停止。
2.3.6 PLC系统组态和液晶屏操作
通过FROFIBUS接口、RS422接口以及工业以太网接口连接三链轮锚机控制系统的各个模块。三链轮锚机控制系统中PLC的通讯应用串行通讯口,能有效地支持具有很高安全等级的分布实时控制,通讯接口协议为RS-422,通过两对双绞线全双工工作,接收、发送信息互不干涉[2]。
通过触摸屏可以操控锚机刹车、离合装置、齿轮箱档位切换,在液晶屏幕上实时显示。在触摸屏界面上,显示变频电机的工作状态、电源电压、输出电流、工作频率、电机转速等;锚机、齿轮箱、刹车装置等位置信息;液压泵站压力、油温、液位、管路压力等的检测信息。锚机工作状态及参数显示和液压控制操作界面见图6。

图6 锚机工作状态及参数显示和液压控制操作界面
3 锚机控制操作步骤
3.1 “动力起抛锚”操作
(1)合上电源,控制箱通电,启动现场控制盘操作面板(显示屏),控制系统进行自检。
(2)设备完成自检后,长按“指示灯测试”按钮5s,所有警示和选择按钮灯亮起,检查是否有报警等信号。一切正常后,启动液压泵站,开启泵1和泵2。
(3)锚链长度预设,在控制盘显示屏菜单上选择操作模式“电机操作状态”,观察齿轮箱换挡装置是否在低速档+有档位置,位置是否到位。
(4)在控制盘显示屏菜单上选择锚机本体装置CUR(以CUR为例,下同),观察CUR离合器是否进入闭合位置,CUL-I和CUL的离合器是否在脱开位置(若CUR离合器无法啮合,小角度扳动操纵手柄,电机慢慢转动,很低速转动齿轮箱轴,让齿CUR离合器顺利啮合);松开CUR带式刹车。
(5)扳动操纵手柄(起锚方向),电机慢慢转动起来,同时盘式刹车松开,观察锚机所有状态在面板上是否显示正常。按指令进行操作,扳动角度可至最大,此时起锚速度最大。起锚过程中,显示屏上显示抛出锚链长度、速度和张力。锚链达到预定长度后,手柄扳回到中间位置,此时盘式刹车制动。
(6)锚机运行过程中注意监测齿轮箱、液压系统等运行情况,温升、噪音、漏油等现象。若有异常,相关报警是否正常显示。
(7)起锚结束后,退出锚机本体装置CUR;揿下锚机控制盘上的“停车状态”按钮,CUR离合器脱开(若CUR离合器无法脱开,反方向小角度扳动操纵手柄,很低速转动齿轮箱轴,让齿CUR离合器顺利脱开)。带式刹车刹紧。
(8)关闭液压泵站,切断电源。
注意事项:
(1)在动力起锚过程中,若需要多次分多段锚链进行起锚时,按上述(5)步骤多次操作。若为动力抛锚时,操纵手柄反向扳动,操作步骤跟起锚一样。
(2)若操作其它锚机本体装置(CUL-I或CUL)时,退出锚机本体装置CUR后,选择相应的锚机本体装置后,按上述(5)步骤操作。
(3)若锚机运行过程中有紧急异常情况发生,按下“紧急停止”按钮,此时,变频电机、液压泵站等全部关闭,在查清楚原因之前,禁止再次启动锚机。
3.2 “抛锚”操作
(1)合上电源,控制箱通电,启动现场控制盘操作面板(显示屏),控制系统进行自检。
(2)设备完成自检后,常按住“指示灯测试”按钮5s,所有警示和选择按钮灯亮起,检查是否有报警等信号。一切正常后,启动液压泵站,开启泵1和泵2。
(3)锚链长度预设,在控制盘显示屏菜单上选择操作模式“动态刹车状态”,在PLC程序控制下齿轮箱自动换至空挡位置,同时水冷刹车按最大流量通入冷却水。
(4)在控制盘显示屏菜单上选择锚机本体装置CUR,观察CUR离合器是否进入闭合位置,CUL-I和CUL的离合器是否在脱开位置。(若CUR离合器无法啮合,切换至“电机操作状态”模式,让齿CUR离合器顺利啮合。)
(5)按指挥员指令慢慢扳动操纵手柄(往前,抛锚方向),带式刹车松开,抛出锚链。抛锚过程中,显示屏上显示抛出锚链长度、速度、张力以及冷却水流量、出水温度等。当抛出锚链长度达到预定长度时将操纵手柄回中间位置,停止抛锚(此时带式刹车刹紧)。锚机运行过程中注意监测齿轮箱、液压系统、冷却水等运行情况,温升、噪音、漏油等现象。若有异常,相关报警是否正常显示。
(6)抛锚结束后,退出锚机本体装置CUR;揿下锚机控制盘上的“停车状态”按钮,CUR离合器脱开(若CUR离合器无法脱开,切换至“电机操作状态”模式,让齿CUR离合器顺利脱开);关闭水冷刹车冷却水。
(7)关闭液压泵站,切断电源。
(8)在抛锚过程中,若需要多次分多段锚链进行抛锚时,按上述(5)步骤多次操作。
注意:若操作其它锚机本体装置(CUL-I或CUL)时,退出锚机本体装置CUR后,选择相应的锚机本体装置后,按上述(5)步骤操作。
3.3 “应急释放”操作
在锚机现场控制盘上,按下所需释放锚链的“紧急释放”按钮,带式刹车松开,释放锚链。
注意事项:
(1)应急释放功能除了在现场控制盘上操作之外,在中央控制台同样能操作。
(2)“应急释放”比“紧急停止”拥有更高的优先权,即在“应急释放”时按下“紧急停止”是没有作用的。
(3)“应急释放”一般仅在平台出现重大危险时才操作(比如锚链张力过大,平台突然受到其它船体的撞击威胁等),目的是快速释放锚链(弃链),因此平时严禁动作。
(4)“应急释放”时,张紧的锚链瞬间释放的动能非常大,导致锚链瞬间移动很快,对带式刹车会产生一定的磨损,发出大量的热量;同时锚链与锚链轮可能会发出火花。因此,需要开启喷水系统对制动轮和锚链轮进行喷水。
4 结束语
本文通过对深水定位锚机样机的成功试制和试验,同时参照和借鉴国外半潜式钻井平台先进的定位锚机,经过创新和自我设计,对深水定位锚机的控制和操作进行了实践总结和详细阐述,基本上掌握了深水定位锚机的组成、功能以及基本控制操作,对我国深水定位系泊系统的发展和实现产业化具有一定的指导作用。
[1]顾 炳.深水定位锚泊系统关键设备研究[C]//上海市船舶与海洋工程学会.中国国际海事会展高级海事论坛论文集,上海:上海市船舶与海洋工程学会,2011.
[2]向晓汉,陆 彬.西门子PLC工业通信网络应用案例精讲[M].北京:化学工业出版社,2011.
[3]梁绵鑫.WinCC基础及应用开发指南[M].北京:机械工业出版社,2009.
Control and Operation Research on Three Sprocket Anchor Machine of Key Equipment for Deep Water Positioning Mooring System
GU Bin1,HU Xiao-dong1,LIU He1,FU Wan-li1,JIN Xin-ping2
(1.CSIC No.704 Research Institute,Shanghai 200031,China; 2.Jiangyin Shuangma Heavy Industry Equipment Co.,Ltd.,Jiangyin 214408,China)
Deep water positioning mooring system as one of the key equipments of the deepwater semi-submersible drilling rigs is widely applied to the task of deep water platform.The main components and functions of the key equipment of deepwater positioning mooring system (the three sprocket deepwater positioning anchor machine)are introduced,especially its operation interface and the operational flow are importantly explained.
deepwater positioning mooring system; three sprocket anchor machine; control operational flow
U664.4+2
A
项目来源:工业及信息化部大型海洋工程设备深水定位系泊系统研制(工信部装[2009]561号)
顾炳(1980-),男,工程师,硕士,主要从事甲板机械及海洋工程特种绞车设计。
猜你喜欢
江苏船舶(2023年2期)2023-06-14 11:07:44
船海工程(2021年6期)2021-12-17 03:17:44
现代制造技术与装备(2021年9期)2021-04-03 13:44:40
海洋工程装备与技术(2021年2期)2021-02-24 00:55:00
船舶标准化工程师(2020年1期)2020-06-12 09:16:24
通信电源技术(2018年5期)2018-08-23 01:15:34
中国修船(2014年5期)2014-12-18 09:03:08
机电产品开发与创新(2014年5期)2014-03-11 16:42:36
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:56
中国矿业(2013年4期)2013-09-07 09:23:36