
船用剪叉式升降机电液比例控制系统设计
2014-10-17 07:01陈四华舒建华
机电设备 2014年3期
陈四华,普 超,舒建华
● (中国船舶重工集团公司第704研究所,上海 200031)
船用剪叉式升降机电液比例控制系统设计
陈四华,普 超,舒建华
● (中国船舶重工集团公司第704研究所,上海 200031)
在船用剪叉式升降机装置上,本文设计了一套采用PLC控制的电液比例控制系统,分析了电液比例控制系统的控制原理及特点。选用西门子公司S7-300 PLC 实现开环控制,其控制方式灵活,调试方便,调速范围、稳定性和自动控制等方面具有明显优势。实际运行表明,该装置在四级及以下海况下运行平稳,上升、下降冲击都较小,取得了良好效果。
船用;电液比例控制;升降机;设计
0 引言
电液比例控制技术是指在液压传动与控制的工程系统中,能实现系统输出量,比如压力、流量、速度和力矩等, 按确定的比例随输入控制信号变化而变化的一门技术[1]。随现代船舶技术的发展,电液比例控制在现代船舶上,如锚机、舵机、减摇装置、绞车和升降装置等广泛应用。整个船用液压系统由不同的液压分系统组成,构成较为复杂[2]。本文针对船舶海洋环境的特殊性,利用国内外先进技术和成功经验,结合我国国情和剪叉式液压升降平台的具体使用要求,实用,力求简单、用尽可能少的液压元件来实现剪叉式液压升降平台应具备的各种动作,以便降低故障发生机率,提高系统能量利用率,从而降低生产成本[3]。论述了电液比例控制技术和PLC在船用剪叉式液压升降机中的应用研究。
1 工况分析
研究的剪叉式液压升降机由平台、导向柱、内臂架、外臂架、驱动油缸、机架、液压机组和电控柜等组成,如图 1所示。升降机额定载荷为 500kg,最大起升高度1200mm,起升时间50s,平台静尺寸(长×宽)为2600mm×2500mm,整机质量 2500kg。平台是刚性较好的框架结构平面,下部由臂架支承。臂架分内臂架和外臂架,它们在中部以销轴铰接,臂架下端部与机架铰接。2个液压缸倾斜安装在臂架中部的横梁上,避免了垂直布置时2个液压缸稳定性不高或在水平布置时横向力影响较大的缺点,结构更合理些。当油缸伸出时,带动内臂架和外臂架相互转动张开,从而带动平台也上升运动;反之,当油缸缩回时,平台下降。

图1 升降机结构图
升降机采用集成化设计将升降平台组件、液压机组、所有电缆中间接线箱全部安装在一个机械框架内,升降平台的电缆、液压管路全部敷设在机架内,整个升降平台在陆上安装调试完毕后,可整体吊装。首先将升降平台整体吊装到位后,机架的安装基座与船体相应基座通过螺栓连接。集成化设计后的升降平台适装性更强,安装方便,缩短了船上安装及设备单机性能恢复时间。
升降机简化示意图如图2所示。HG表示驱动油缸,建立以固定支点A为坐标原点的直角坐标系。综合油缸的行程和液压缸的最大负载力等因素,取 AH=200mm,OG=400mm,α=10°,用上述的数据通过ADAMS仿真分析得到的平台位置曲线和速度曲线及油缸负载力变化曲线如图 3(a)、3(b)、3(c)所示

图2 升降机简化示意图

图3 平台位置、平台速度与油缸负载力变化曲线
剪叉式液压升降机液压缸是驱动剪叉起升的动力装置,活塞的最大推力 Fmax是确定液压系统工作压力的依据。由分析结果图3(b)可知,平台的速度由大逐渐变小,油缸最大负载力Fmax=64430N。在启动时,油缸力最大,平台速度也最大,初始时刻会有冲击。
2 液压系统设计
从平台的运动分析(如图3(b))可知,平台上升启动初期冲击较大。用简单的阀控缸型式难以实现平台的平稳运动,所以采用电液比例控制系统。其控制方式又分为开环和闭环控制等,开环控制的液压系统是依靠各种电气和液压控制元件来实现速度、位置等控制,它一个显著的特点就是没有设定和检测装置,所以对其产生的误差也就不会自动的反馈和纠正。一旦选定了控制元件,整个控制系统的精度也就基本上固定了,这就影响了开环控制的大量应用和推广。不过开环控制系统成本较低,控制方式较可靠和简单。闭环控制与开环控制相比,它是根据控制对象输出的反馈来进行校正的控制方式,这种方法是在测量出实际的控制要求与指令的发生偏差时,按设定的控制策略来进行纠正,能达到更高的控制精度。但闭环控制的控制系统一般比较复杂,控制成本较高;但当系统要达到高的控制精度时,就必须采用闭环控制。
由于升降机的平均速度仅为0.024m/s,且运行时间较短只有50s,不需要较高的速度控制精度,所以,要设计的液压系统采用开环比例阀控制液压缸传动,实现液压剪叉式升降平台的正常工作,系统设计原理图见图4。

图4 系统设计原理图
在升降平台上升状态时,能平稳上升。在下降时,升降平台平稳下落,速度稳定,无冲击。在突然断电的情况下,平衡阀起作用,升降平台能固定在某处,不会突然下落,造成意外事故;系统液压原理图见图5。在启动初期,通过PLC输出一个极低的信号给比例放大器,将设定输出的信号放大成一定的驱动功率的控制信号加到电液比例阀(8)上,控制电液比例阀(8)阀芯开口的大小,从而控制液压系统的流量,使油缸(2.1)和(2.2)缓慢伸出,降低初期的冲击振动。此外,为保证电液控制系统正常工作,设置有液压附件如温度计、液位传感器(19)和过滤器(20)等。
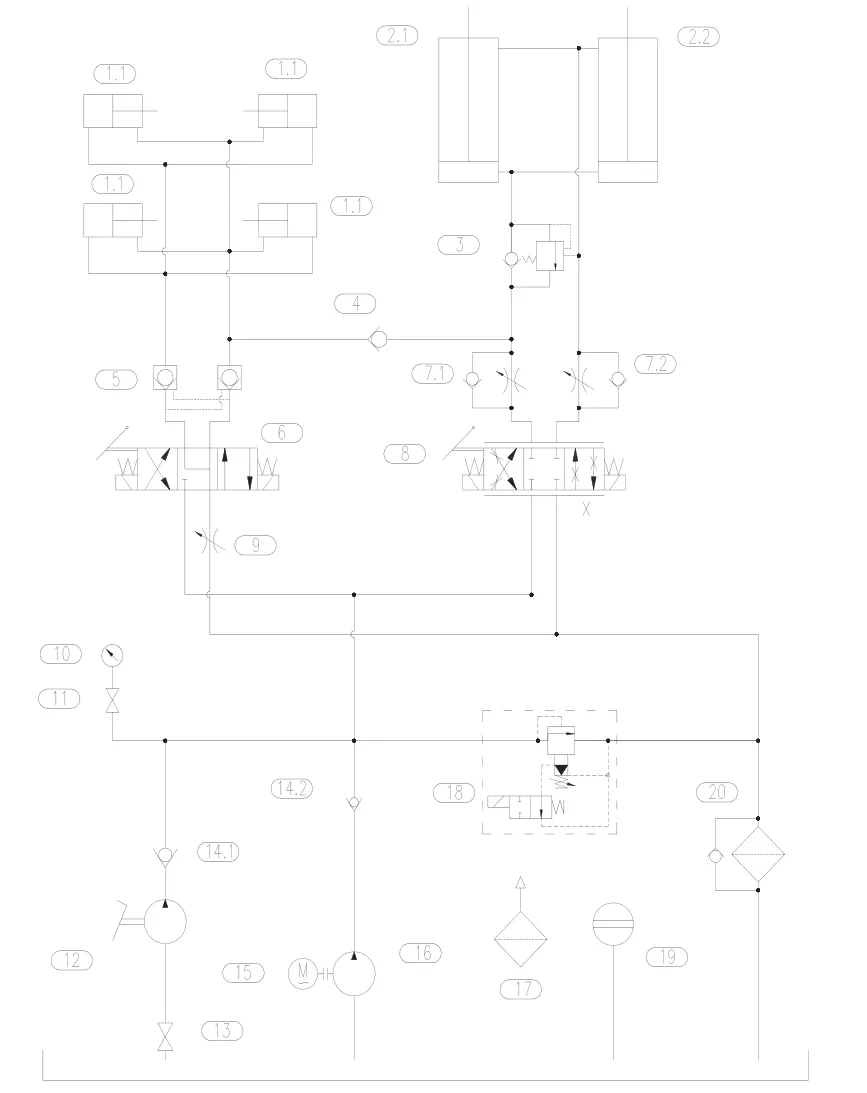
图5 液压系统原理图
在电气元件损坏或突然失电的情况下,为了提高设备的任务可靠性而增加了手动工况,依靠人力揿手动泵,通过操作换向阀(6)和(8)来驱动油缸动作,从而实现在突然断电的情况下,升降平台能继续上升或下降。 当到达某一位置时,操作手动换向阀使其处于断开状态,由于平衡阀(3)的作用,升降平台停止,提高了设备的任务可靠性。
3 电气系统的设计
3.1 硬件配置
设计的电液比例控制系统含有模拟、数字量和脉冲量的输入输出等参量。根据这一特点,选择西门子 S7-300可编程控制器作为整个电控系统的控制元件; S7-300系列PLC是一种模块化的结构,提供了各种性能递增的CPU和丰富的且带有许多功能的I/O扩展模块,各种模块可根据系统复杂程度很方便配置。在系统中 CPU 选用CPU315,具有中到大容量的程序存储器和大规模I/O配置的CPU,可用于包括分布式及集中式I/O的任务中[4]。
PLC配置为:CPU模块CPU 315、开关量输入模块DI2、模拟量输入输出模块AI2/AO2和电源模块PS 307 10A。结构如图6所示。

S7-300 控制系统I/O地址分配见表1。
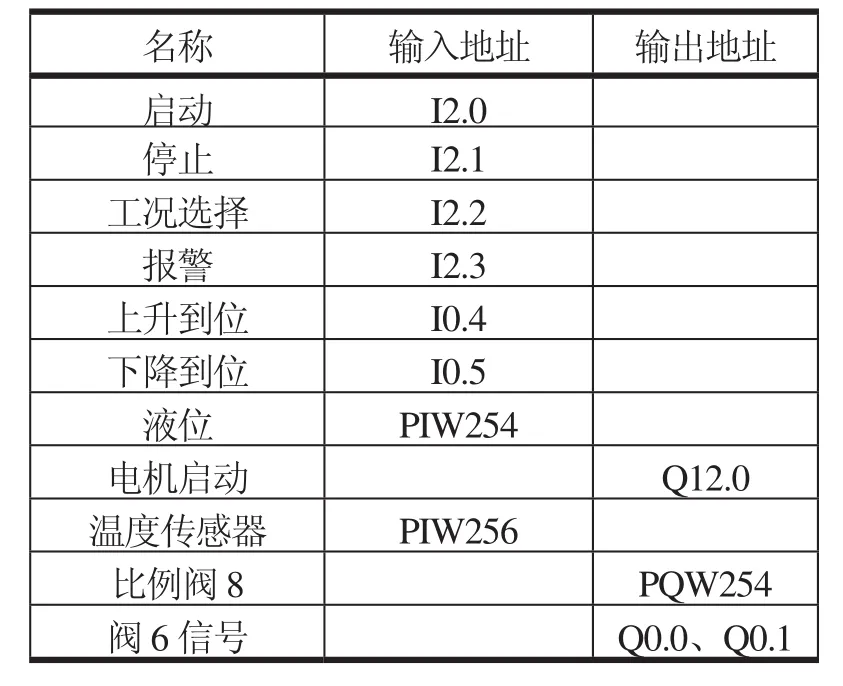
表1 可编程控制系统I/O分配表
3.2 控制软件设计
PLC 程序采用STEP7软件设计开发。STEP7 有LAD(梯形图)、STL (语句表)和FBD (功能块图)等编程形式,3种形式种可随意切换和组合使用,非常方便。程序设计采用结构化编程,有组织块(OB)、数据块(DB)、功能块( FB、FC)等组成剪叉式升降平台控制系统程序。
先在 STEP7 软件中对系统进行硬件配置和网络配置,在STEP7 5.2中按上述配置进行硬件组态,将AI设置为0~20mA,与模拟传感器输出信号匹配,将AO设置为-10V~+10V,与比例放大器匹配。
PLC软件的设计与编写。按照系统的工况和联锁条件,程序结构为:一个组织块(OB1)、四个功能(FC1、FC2、FC3、FB1)、和三个数据块(DB1、DB2、DB3)等。其中OB1作为主循环程序块,调用其它功能块和数据块实现控制任务;FC1是条件、状态检测功能,用于对油温、液位、油污染情况进行检测,判断液压系统是否具备工作条件;FC2属联锁控制功能,对平台启动、停止条件和联锁条件进行逻辑运算,保护平台运行安全;FC3是通讯功能块,为未来系统扩展用;FB1是控制比例阀8的功能块, DB1作为整个程序的共享数据块。程序结构如图7所示。
4 结语
在船用剪叉式升降机装置上完成了基于PLC 的比例液压控制系统的方向、调速回路设计;选用西门子公司S7300 PLC 实现控制,采用STEP软件编制了相关PLC控制程序。这比开环液压调速控制系统,控制简单,稳定性好,调速方便,工作可靠、操作简便、调试方便和易于维修保养。
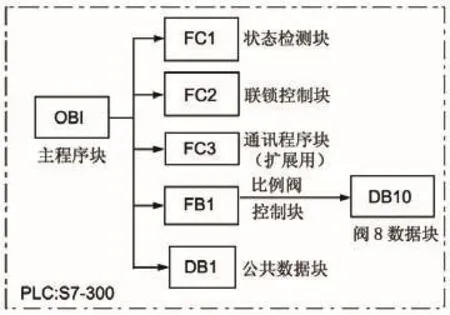
图7 S7-300程序结构图
目前,该剪叉式升降机已在某型船投人使用,而实际运行表明,该装置在四级及以下海况下运行平稳,上升、下降冲击都较小,取得了良好效果。
[1]李浩.电液比例控制技术在耙头绞车主动补偿系统中的应用研究[J]. 液压与气动, 2013(4): 66-68.
[2]陈四华.船用输送装置控制系统冗余设计[J].机电设备, 2012(2): 58-59
[3]於又玲,刘明春,曾志钢,等.剪叉式升降机液压系统的设计[J]. 液压与气动, 2008 (11): 25-26.
[4]S7-300可编程程序控制器产品目录[M]. SIEMENS,2012.
[5]成大先.机械设计手册(第四版)[M]. 北京:化学工业出版社, 2002.
[6]液压传动与控制.机械设计手册单行本[M]. 北京:机械工业出版社, 2007.
1~4月我国船舶工业经济运行情况 1
2014年前4个月,船舶工业行业经济运行继续保持平稳,造船完工量同比下降,承接新船订单、手持船舶订单同比继续增长,主要工业经济指标同比企稳回升。
三大造船指标两升一降
1~4月份,全国造船完工1036万载重吨,同比下降24.9%;承接新船订单3030万载重吨,同比增长160%;4月底,手持船舶订单1.5015亿载重吨,同比增长43.2%,比2013年年底增长14.6%。
1~4月份,全国完工出口船948万载重吨,同比下降17.2%;承接出口船订单2897万载重吨,同比增长174%;4月底,手持出口船订单1.4084亿载重吨,同比增长57.5%。出口船舶分别占全国造船完工量、新接订单量、手持订单量的91.5%、95.6%和93.8%。
Design of Marine Hydraulic Scissor-fork Lift Electro-hydraulic Proportional Control System
CHEN Si-hua, PU Chao, SHU Jian-hua
(No.704 Research Institute, CSIC, Shanghai 200031, China)
According to marine hydraulic scissor-fork lift, an electro-hydraulic proportional control system is designed and the electro-hydraulic proportional’s control principle is analyzed. The open control system has the flexible and intellectualized function,and excellence of control mode, little debug and good stability etc. In practice, the lift can work smoothly under Class 4 sea condition and less shock under up and down movement. It obtains a good effect.
marine; electro-hydraulic proportional control; lift; design
TM31
A
陈四华(1981-),男,硕士,主要从事方向为机电液系统设计和研究。
猜你喜欢
燃料化学学报(2022年5期)2022-05-30
中国工程机械学报(2019年6期)2019-12-31
中国特种设备安全(2019年4期)2019-05-20
好孩子画报(2019年10期)2019-01-10
中国特种设备安全(2018年10期)2018-12-18
制造业自动化(2017年2期)2017-03-20
专用汽车(2016年7期)2016-11-23
大连理工大学学报(2016年5期)2016-10-12
凿岩机械气动工具(2016年3期)2016-03-01
合成化学(2015年4期)2016-01-17
