
一种面向芯片转移的对心检测方案设计
2014-10-15 09:58叶晓滨陈建魁尹周平
制造业自动化 2014年19期
叶晓滨,陈建魁,尹周平
(华中科技大学 数字制造技术与装备国家重点实验室,武汉 430074)
0 引言
倒装键合技术逐渐成为微电子封装的主流技术之一[1,2]。在倒装键合技术中,需对芯片进行拾取、翻转、转移和贴装等操作,特别在不同吸嘴间转移芯片时,需要保证对接吸嘴轴线的对心精度,防止由于对心不良导致的芯片滑移、侧立及脱落所引起的封装失效。
常规对心装置及检测方式有:刘庆胜等[3]所述的上下顶尖同轴的调整方法,通过使用百分表或扭簧比较仪对上下顶尖进行轴线调整;Jeong等[4]提出的轴线对准方案,利用激光束、反射镜和光电二极管等器件,通过成像得出激光束和旋转平台轴线之间的偏差,再通过调整激光束位置使得两者轴线重合;Bell等[5]设计了一种具有两组挠曲件的柔性光学装置,通过在挠曲件上施加弯矩使光学元件的光轴中心发生旋转,最后使得挠曲件的投影线交点与所述的光学元件的光轴重合;卢好蕊[6]在圆柱度仪的对中控制中采用螺旋采点法,将所测数据进行圆柱拟合,得出被测工件轴线的偏心量和倾斜角度,然后进行调节。上述对心检测方案常为机械式手动调节或改为施加自动调整运动或力,其操作或控制较为繁琐,通常不满足自动化工况的要求。
目前,采用机器视觉系统实现高精检测和对准逐渐成为趋势。Chen等[7]采用机器视觉对准系统实现丝网印刷的高速定位,Chen等[8]提出了包括视觉引导反馈系统的拥有自动同轴对准能力的机床主轴。采用机器视觉进行对心检测时,为判断空间两物体是否同轴,至少需要从两个方向上进行观察。已有方法通常使用多个相机进行观察或者使用单个相机进行变视角观察。前者成本过高,且所占空间范围较大;后者改变相机的位置及角度常引起操作不便,且改变相机位置后难以保证物距相同,需重新调整相机的焦距进行观察。
因此,为解决倒装键合工艺中对精密对心工艺的需求,克服常规机械式调整的复杂操作,并引入机器视觉的高精检测优势,本文拟提出一种基于单相机和光路系统的对心检测方案,并验证其效果。
1 对心检测方案的设计分析
一种基于单相机和光路系统的对心检测方案从对心光路的设计、对心装置的结构设计以及对心偏差计算的实现等方面进行论述。
1.1 对心光路及装置结构设计分析
对心检测方案的光路设计如图1所示。光路由被测对象传出,分为两路光线,经过一对一次反射镜,光路变为水平方向。再经过一对二次反射镜,光路垂直进入相机镜头,实现单相机的双视角采图。
为了满足清晰采图,要求光路的物距等于相机的焦距,即:
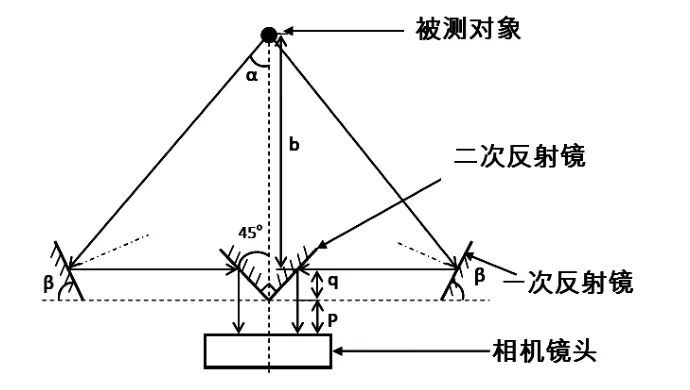
图1 光路方案原理图

其中,b为被测对象与二次反射镜面中心的垂直距离;α为被测对象到一次反射镜面的光线与竖直方向的夹角;β为一次反射镜面与水平方向的夹角;二次反射镜面与水平线的夹角均为45゜,且两个二次反射镜面相互垂直;q为二次反射镜面中心与水平线的垂直距离;p为水平线与相机镜头距离;为相机的焦距。
根据的大小值可计算出一次反射镜面与水平方向的夹角,其满足:

实际中可根据工况选择合适的b值,计算出所需值,即可求取对应一次反射镜面到二次反射镜面的中心距离和一次反射镜面需要调整的角度,最后将一次反射镜镜面调整到位。
在光路方案基础上,需进一步在机械结构上考虑满足功能的支撑、调节机构等,同时还需要考虑到相机的视野范围,所需的镜面尺寸等条件。在装置结构设计以及实际应用中可以适当增加镜面的宽度和高度,避免因为加工或安装误差导致不能完整成像。所设计对心检测装置模型如图2所示,其中两侧远端旋钮用来调整一次反射镜距离二次反射镜的间距,内侧两旋钮用来调整一次反射镜的角度。
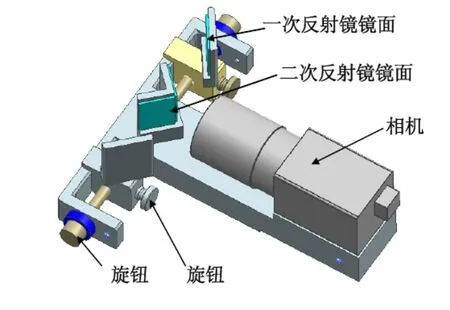
图2 对心检测装置模型图
1.2 对心方案的偏差计算
上述对心方案通过光路和机械结构设计,利用相机和成套反射镜,可同时采集两个不同方向上的图像。然后利用对心的两者在图像空间的偏差值,即可反求出被测对象在实际物理空间中的偏差值,最后利用运动平台完成准确对心的功能。对心方案示意图如图3所示。
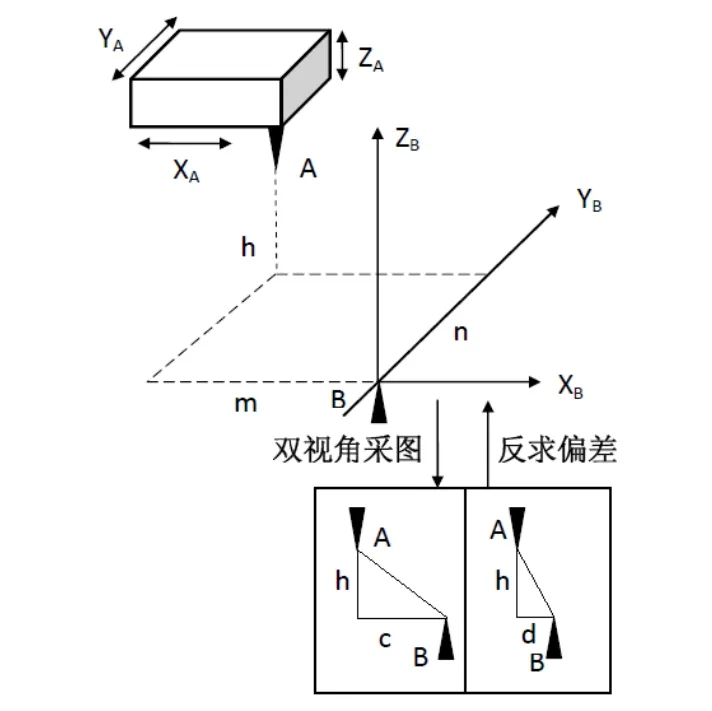
图3 对心方案示意图
A、B两被测对象在经过双视角采图后,从所采集的图像上可得到被测对象A、B在两个方向上的距离,且其水平距离分别为c、d,竖直方向上两被测对象的高度差h相等。假设对心装置前支架与水平X向的夹角为γ,通过相机镜头的物距以及被测对象到二次反射镜面中心的垂直距离的选择,可计算出视角α。如图4所示,光路e1以及e2分别与负Y轴夹角分别为α-γ,α+γ,过A点分别作e1、e2的平行线、e1'、e2',过点B分别做两条平行线的垂直线,垂足分别是A1、A2,两条垂直线的长度即为c,d。而后问题转化为求向量 ,即将A点相对于B点在X、Y方向上的距离设为(m,n),联合竖直高度差h,则点A相对于点B的空间偏差为(m,n,h)。
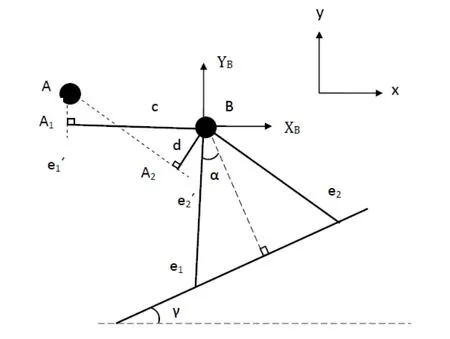
图4 对心偏差计算示意图
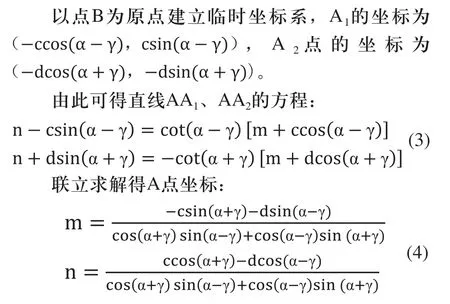
基于B点坐标系所计算出来的A点坐标即可理解为实际物理空间中A、B两点的位置偏差,通过对心检测所在装备的运动系统调整A点的位置,使其与B点重合,即可完成对心检测和操作功能。
2 对心方案验证
在RFID标签封装设备中,通常采用倒装键合技术完成芯片与天线的互连,此工艺中需通过翻转头将芯片从Wafer晶圆拾取,再将芯片翻转180°后与贴装头完成芯片对接,再通过贴装头将芯片准确放置到天线焊盘区域[9]。翻转头吸嘴与贴装头吸嘴交接芯片过程中需要实现两吸嘴中心的精确检测和对位,此过程可以通过上述对心检测方案和装置实现,实际工况如图5所示。
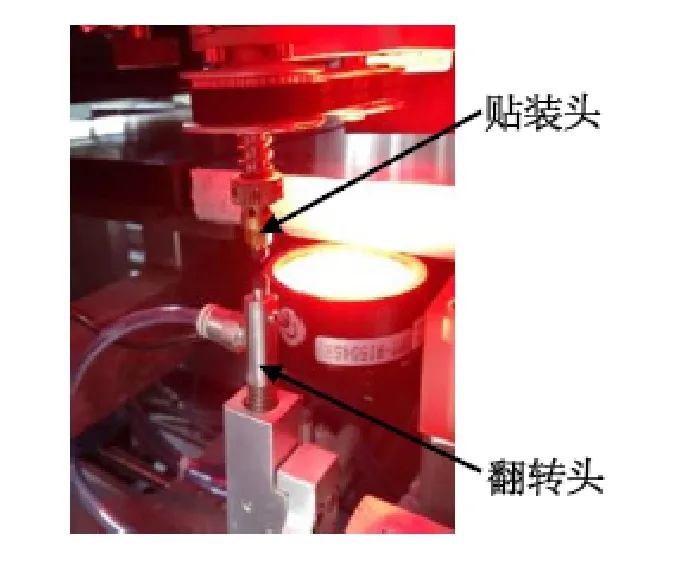
图5 被测对象所处工况
检测的目的是使贴装头与翻转头的轴线重合,保证芯片的正常拾取对接,该对心检测装置实物如图6所示。
在实验过程中,对心装置配置德国BASLER acA1300-30gm型号相机,测得贴装头和翻转头与二次反射镜面中心的垂直距离都约为240mm,一次反射镜面与水平方向的夹角约为56°,对心装置前支架与水平X向的夹角约为35 °。
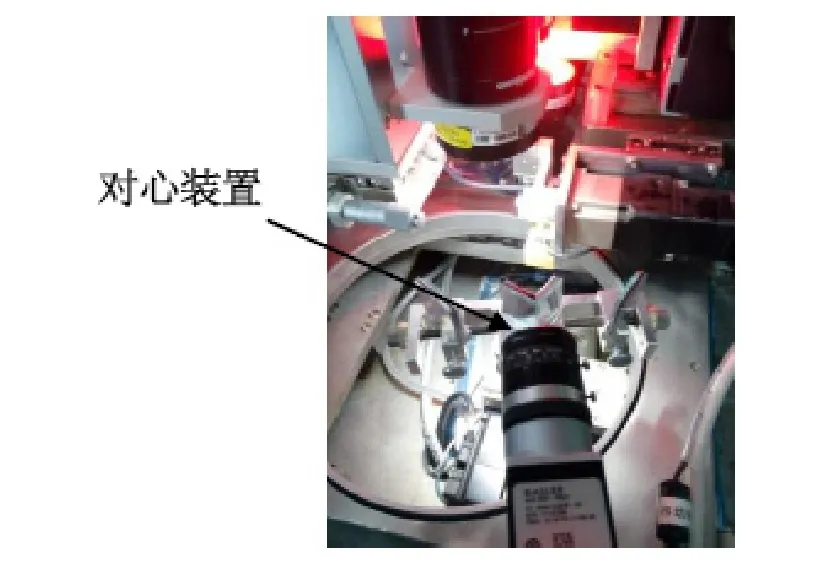
图6 对心装置实物图
在未进行对心调整前,两被测对象的空间轴线不重合,使用装置进行双视角采图后,相机视野里会同时出现两个方向上的图像。图像显示,两吸嘴存在两个方向上的水平距离差c和d,竖直高度差h基本一致,如图7所示。
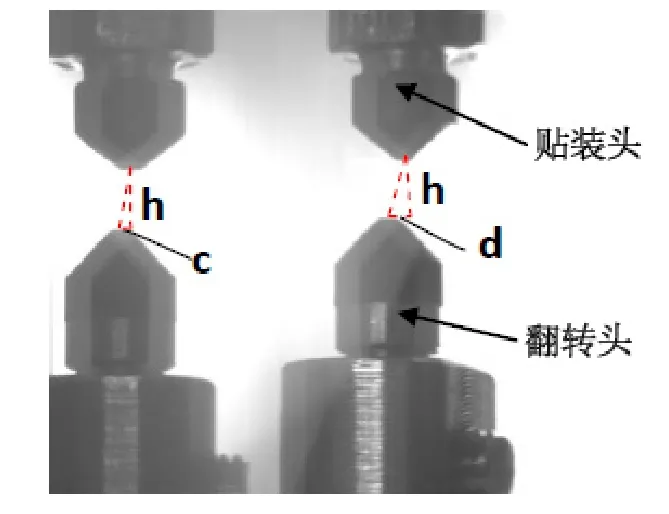
图7 调整前被测对象状态
通过系统中贴装头的移动,完成初始对心调整和高度移动后,再次利用对心检测装置视觉系统采图,并求解得到初始对心后两者轴线在图像的左右两边的像素偏差,利用偏差反求计算出被测对象的实际物理距离,并经平台运动调整予以补偿。所采集的图像如图8所示,此时可重新求解得到两被测对象轴线在图像的左右两边的像素偏差。
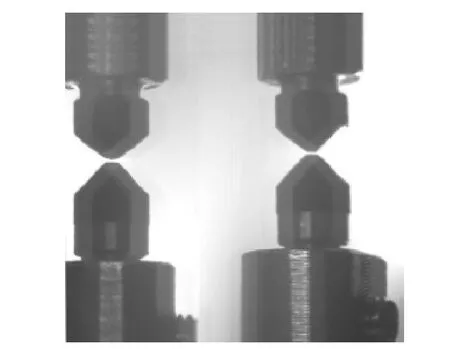
图8 对心检测装置调整后被测对象状态
上述实验过程和数据结果如表1所示,实验数据表明,翻转头与贴装头初始对心精度为±20像素,经对心检测和调整后,对心精度提高至±5像素。

表1 对心偏差对比表
实验结果显示该对心检测方案能在不影响被测对象运动和布局的情况下切实提高倒装工艺中对心精度,直接证明所述方案中光路设计和偏差计算方法的正确性。
3 结束语
面向倒装键合工艺芯片转移过程中精确对心需求,本文提出了一种基于单相机的对心检测方案,设计了能将被测对象进行双视角采图的光路和机械装置,详细分析了利用所采图像求解被测对象的空间位置偏差,然后通过偏差补偿实现精确对心。RFID标签倒装键合装备上完成的实验表明,利用本对心检测装置对双吸嘴偏差进行检测补偿后,能切实提高对心精度,满足实际工作需求。
[1]曾苗,廖广兰,张学坤,等.基于模态分析的倒装芯片缺陷检测[J].振动与冲击,2013,32(6):24-28.
[2]Vardaman E J,Matthew L.Flip chip market trends[C].SPIE proceedings series.Society of Photo-Optical Instrumentation Engineers, 2001:571-574.
[3]刘庆胜,薛贵侠.上下顶尖同轴的调整方法[J].金属加工(冷加工),2008(14):47-48.
[4]Jeong S J, Lee S K, Jeong S H.Beam alignment with the axis of a rotation stage for laser fabrication of microcircular structures[J].Optics & Laser Technology,2004,36(5):401-408.
[5]Bell A D, Cronin S R.Two-axis optical adjustment flexure mechanism[A].International Symposium on Optical Science and Technology[C].International Society for Optics and Photonics,2000:237-244.
[6]卢好蕊.面向圆柱度仪的自动对中控制技术研究[D].郑州:郑州大学,2012.
[7]Chen C J, Jywe W,Teng Y,et al.To develop a high speed autoalignment system by dual machine vision based alignment system[A].International Conference on Optics in Precision Engineering and Nanotechnology (icOPEN2013)[C].International Society for Optics and Photonics,2013: 87692Q-87692Q-7.
[8]Chen W J, Lin W, Luo H, et al.An Multi-Axis Spindle for Automated Coaxial Alignment[J].Key Engineering Materials, 2010, 447: 503-507.
[9]付宇.RFID标签封装设备贴装头设计与实现[D].武汉:华中科技大学,2011.
猜你喜欢
新能源科技(2022年9期)2022-11-20
北京测绘(2021年7期)2021-07-28
装备制造技术(2020年11期)2021-01-26
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
环境技术(2020年1期)2020-03-06
中学物理·高中(2018年10期)2018-11-06
理科考试研究·初中(2017年5期)2018-03-07
中国光学(2015年1期)2015-06-06
中国高新技术企业·综合版(2013年1期)2013-02-04
