宽频段干涉仪测向天线设计
2014-10-13 08:00:18寇亚舟
舰船电子对抗 2014年3期
寇亚舟
(中国电子科技集团公司54所,石家庄050081)
0 引 言
无线电测向技术从出现到现在发展了上百年时间,出现了各种各样的测向系统。测向体制分为幅度比较测向体制、沃森-瓦特测向体制、乌兰-韦伯尔测向体制、到达时间测向体制、干涉仪测向体制、多普勒测向体制、空间谱估计测向体制等[1-2]。
干涉仪测向体制依然是现阶段使用最广泛、采用最多的一种方法。为了保证在宽频段内实现高精度的测向,必须对干涉仪测向天线进行组阵设计。
1 干涉仪测向组阵设计
干涉仪测向组阵设计就是按照给定的测向精度、测向范围以及设备的相位测量误差,选择合适的天线单元,并确定它们之间的间距。当然,在满足测向性能指标要求的前提下,需要的天线阵元数越少,且能够在较大相位差测量误差的环境下正确解模糊越好。
1.1 长短基线匹配干涉仪组阵设计
长短基线匹配干涉仪要求最短基线长度小于信号波长的一半,新增其它基线用于逐次解相位模糊,提高测向精度[3]。长短基线匹配干涉仪如图1所示。

图1 长短基线匹配干涉仪
经过推导可得到如下递推关系式,逐次确定其余各条基线的模糊数Nk,完成解模糊过程:
实际测向设备在进行相位测量时不可避免地存在测量误差,当相位测量误差超过一定范围后会导致上述逐次解模糊过程出现错误,即无法获得正确的N值。设干涉仪的无模糊测向范围为[-θm,θm],各基线允许的最大相位测量误差为Δφk,由单基线干涉仪公式及上面递推关系式解模糊表达式,可得到如下的解模糊条件:

长短基线匹配干涉仪组阵设计步骤:
(1)按照测向设备工作的最高频率(最短波长λmin)、最大无模糊测向角度θmax、最大相位差测量误差Δφ确定需要的短基线长度D1;

图2 虚拟基线干涉仪组阵示意图
(2)根据测向精度表达式确定总的基线长度;
(3)根据最大相位差测量误差Δφ,确定其它各条基线的比例系数;
(4)各条基线长度之和大于所需的总基线长度。
1.2 虚拟基线匹配干涉仪组阵设计
小型化测向设备受限于天线尺寸,因此实际应用中使用虚拟基线干涉仪组阵设计。虚拟基线干涉仪组阵示意图如图2所示。
虚拟基线干涉仪解模糊条件与实基线解模糊条件类似,但2个虚拟天线单元之间的最大相位差测量误差为2Δφ,所以解模糊条件为:

虚拟多基线干涉仪天线阵设计的关键是虚拟基线的选择和构造,考虑到相位差测量误差,基线长度还应满足上述约束。如图3所示,虚拟基线主要通过相邻2条基线相减获得,同时还可以利用虚拟基线的和来构造新的虚拟基线以增加虚拟基线的数目。
虚拟基线组阵设计步骤:
(1)按照测向设备工作的最高频率(最短波长λmin)、最大无模糊测向角度θm、最大相位差测量误差Δφ,确定需要的短基线长度D1。利用基线Dm+1、Dm+2构造虚拟基线D1= Dm+2-Dm+1。

图3 虚拟基线构造过程示意图
(2)利用基线Dm+2、Dm+3构造虚拟基线D2= Dm+3-Dm+2=K1D1。
(3)利用前2条基线的和构造第3级虚拟基线D3= Dm+3-Dm+1=(K1+1)D1。
(4)利用基线Dm+3、Dm+4构造第4级虚拟基线D4= Dm+4-Dm+3=K1D3=K1(K1+1)D1。
(5)重复步骤(3)、(4),构造其余虚拟基线。该步骤也用于确定构造虚拟基线的阵元间距。
(6)令Dm+1为所有基线长度之和的K2倍,由此可知需要多条虚拟基线:

(7)实际基线数n与虚拟基线数m 之间应满足:

(8)根据K3,构造其它实基线。
1.3 天线匹配加载设计
利用相位信息确定来波入射角能达到较高的精度,但测向天线之间的互耦对系统性能影响很大。加载匹配网络不但能降低接收机端口的驻波比,还能有效地减弱天线之间互耦的影响[4]。
在天线馈电端,采用宽带匹配网络,使得馈线阻抗与天线特性阻抗能更好地匹配,从而使天线实现更好的驻波比,实现信号的高效接收。
采用印制板作为对称阵子天线的2臂,其等效半径与印制板的厚度t和宽度s有关,具体数值可以由图4曲线得到。设天线的单臂长度为l,等效半径为ae,则天线的长细比因子为:

天线特性阻抗为:


图4 曲线图
采用分布加载,即在有限长的偶极子天线上,每隔一定的单位长度都对天线进行加载,试验表明,分布加载能够使天线获得更好的电性能。
理论分析表明,分布式加载天线每单位长度加载阻抗为:

式中:φ为一个实常数,由天线的电长度及结构参数决定,计算极为复杂,其虚部和实部比较起来很小,在工程中,可以把它近似地看成一个实常数,可以用经验公式φ=Ω-3来计算。
2 结束语
设计完成后的测向天线阵进行了相位、幅度的测试,并生成了样本数据库。在标准试验场随机抽取2个方位对测向精度指标进行测试,300~3 000MHz,统计精度在2°以内,如图5、图6所示。

图5 方位1测向误差
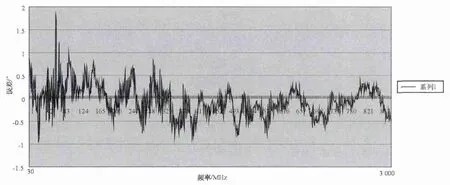
图6 方位2测向误差
经过试验验证,完成了宽频段干涉仪测向天线的设计,并在工程应用中实现了高精度测向。
[1]陈俊华.圆阵干涉仪测向技术[D].上海:上海交通大学,2008.
[2]Lars Jisefsson,Patrik Person.Conformal Array Anten-na Theory and Design[M].Boston USA:Artech House,2006.
[3]李淳.廖桂生.李艳斌.改进的相关干涉仪测向处理方法[J].西安电子科技大学学报(自然科学版),2006,33(3):401-403.
[4]辛红,郑家骏,梁昌洪.匹配网络对测向天线阵性能的改善[J].微波学报,2000(4):354-360.
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:34:06
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:02
科技研究·理论版(2021年20期)2021-04-20 01:13:14
应用数学(2020年2期)2020-06-24 06:02:40
计测技术(2020年6期)2020-06-09 03:27:14
航天电子对抗(2019年4期)2019-06-02 08:22:40
制导与引信(2017年3期)2017-11-02 05:16:58
火控雷达技术(2016年2期)2016-02-06 02:29:06
火控雷达技术(2016年2期)2016-02-06 02:29:04
电测与仪表(2015年18期)2015-04-12 00:45:28