
热力管道泄漏检测系统设计
2014-10-10 09:45张永胜
制造业自动化 2014年4期
李 琦,赵 杰,张永胜
LI Qi1, ZHAO Jie1, ZHANG Yong-sheng2
(1. 内蒙古科技大学 信息工程学院,包头 014010;2. 内蒙古包钢西北创业设计研究院,包头 014010)
0 引言
供热管道在现代工业生产和人们生活中占有重要的位置,成为冬季北方城市生活的大动脉。随着城市化进程的加快,各地的供热管道多采用直埋敷设方式,具有节约能源、造价低等优点,但这样就限制了红外热像仪在热网故障诊断中的推广使用,而对已经铺设的管道再次铺设分布式光纤测温系统用来进行泄漏诊断,成本昂贵无法实施。目前管道泄漏的检测技术有听声法、内投球法等,然而由于供热管道的介质和环境的特殊性,这些方法未能在供热管道上得以应用,且实时性较差[1]。
为了能迅速诊断并定位泄漏点,本系统采用负压波对供热管道进行检测,负压波法不需要建立复杂的管道模型,且对设备仪表的要求比较低(无需流量传感器),检测速度较快,实时性好,投资少,缺点就是对渗漏和微弱的泄漏的检测效果不理想。
1 负压波检测泄漏的基本原理
当管道的某位置发生泄漏事故时,泄漏处物体的压力突然减小,由于管道中的物体不能立即改变其流速,在泄漏处周围的物体就会向泄漏处流动,形成一个以泄漏处为中心的压力波动,这一压降波将沿着管道向两端传播,被称为负压波[2]。
负压波检测原理如图1所示,泄漏点的位置可以由下面的公式得到:

式中:x为泄漏点距首端测压点的距离,m;
L为被测管路对象的长度,m;
v为负压波的传播速度,m/s;
∆t 为首末端采集负压波的时间差,s。
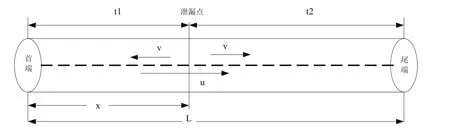
图1 负压波检测泄漏原理图
从式(1)中可知影响泄漏点定位准确度的主要是v和∆t,负压波的速度可以由式(2)求解:
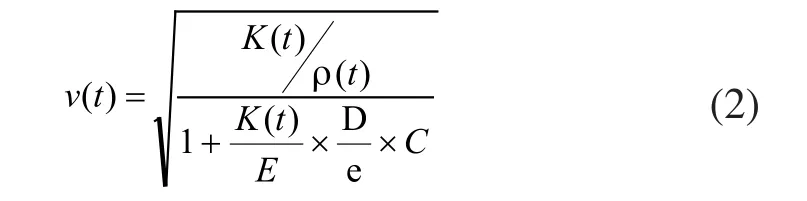
式中:v(t)为温度为t时的负压波波速,m/s;
K (t )为温度为t时水的体积弹性系数,Pa;
ρ (t )为温度为t时水的密度,kg/m3;
E为管道的弹性模量,Pa;
D为管道的直径,m;
e为管道管壁的厚度,m;
C为与管道约束条件有关的修正系数。
对于已经投入使用的管道,它的厚度、直径、弹性模量都是定值,只需考虑管道内水的弹性系数和密度,而水的弹性系数和密度均与温度有关,此时的负压波速度是有关温度的函数,将式(2)展开成关于温度t的泰勒级数,通过分析计算在供热管网的温度范围内,泰勒级数展开式中的高次项都趋近于零,所以负压波的速度与热水的温度近似成线性关系[3]。经过数值拟合可以得出:

式中:k为大于零的常系数。在进行计算负压波速度的时候必须考虑温度对其的影响,可以利用式(3)做出一定程度的近似。
时间差∆t主要有两方面影响,一方面是各个热力站采集系统的时钟是否同步;另一方面是于工业现场有不可避免的各种干扰造成采集到的数据含有大量的噪音且采样频率高,对采集到的信号消噪能否准确寻找到突变点,其与采集频率和上位机的诊断故障的算法有关[4]。
2 泄漏故障诊断系统设计与构成
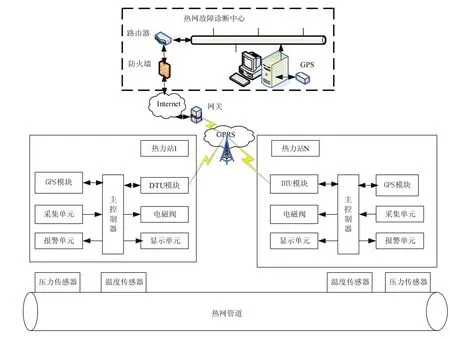
图2 热网故障诊断系统
热网故障诊断系统框图如图2所示,系统由远程故障诊断中心和若干个热力站点的采集设备组成。在各个热力站完成对压力和温度信号的采集处理,由故障诊断中心分析计算确定采集数据的突变点,进而确定故障点的位置。本文侧重于热力站采集系统的设计与开发,在满足功能要求的条件下尽可能选择集成度高且功耗小的芯片以保证系统运行的稳定性。
在管道两端安装压力传感器(JKB-K0-HAG)和温度传感器(JWB/P23),热力站采集系统采集温度、压力信号(4~20mA),采集数据实时显示供值班人员查看、记录数据,把GPS模块接收并解析的时间信息用来授时,经过主控芯片的数据处理,并通过GPRS DTU按照既定的数据传输协议传到故障诊断中心。
该故障诊断系统需要泄漏管道两端采集到的数据同步才能进行分析,因此必须保证各采集系统的时钟数据同步即所要分析数据的起始点(时间)必须一致,否则由于时标不统一将导致故障点的定位误差增大。为了解决这个问题,将GPS接收到的时间信息作为各热力站和故障诊断中心的时间基准,实现采集点与采集点、采集点和故障诊断中心的时钟同步。
全球卫星定位系统(Global Positioning System , 以下简称GPS)可以为全球提供统一的高精度时间基准,通过对GPS模块的二次开发,可实现全天候、干扰小、精度高的时钟同步系统,非常适合于异地采集同步系统[5]。GPS模块接收的是以原子钟为基准的时间信号,原子钟的时间与世界协调时的误差在微秒级,加上传输计算的延迟,其精度也能在毫秒级范围,基本符合工业上的时钟同步应用[6]。
2.1 系统硬件设计
热力站采集设备硬件设计框图如图3所示,其硬件部分主要由主控芯片STM32F103VBT6、显示模块、报警模块、采集模块、GPS模块、无线传输模块构成。CPU选用了STM32系列微控制器,由ST意法半导体公司以ARM Cortex-M3为内核开发生产的32位微控制器,其高性能、低成本、低功耗的特性在工业领域有很大的应用空间。

图3 热力站硬件设计框图
热力站采集设备的系统时间由GPS模块提供,安装在管道上的高精度的压力传感器和温度传感器对现场信号进行采集,结合实验研究和工程实际确定采样频率为100次/秒,通过液晶屏实时显示当前的压力、温度、时间等数据;经STM32处理后,当采集设备判断为泄漏时,通过控制电路将电磁阀关闭,减少泄漏损失,并将采集数据和GPS接收的数据通过GPRS网络传给故障诊断中心以便对泄漏点进行定位。
GPS模块选用韩国JCOM C3-370C,其主芯片为高性能的GSC3F且集成了实时时钟ARM7TDMI处理器,可选的内部/外部射频连接器,低噪声放大器和滤波器增大增益,内置备用电池和天线,体积小巧,其外接引脚为EN、VCC、TX、RX、GND和BOOT,其中BOOT引脚在其正常通信时需悬空;GPS的TX引脚需接CPU的RX,不要接反。
无线传输模块选用了宏电公司的H7710 DTU,仅需使用前利用串口助手对其配置一次基本参数,并且H7710还具有心跳定时连接的功能,保证DTU永久在线,兼备RS232/422/485或TTL电平接口,适用于使用环境恶劣的各种工业监控的应用场合,为用户提供了高速、永远在线、透明数据传输的虚拟专用数据通讯网络。本设计中其与单片机通过RS-232接口连接,可实现热力站采集设备与故障诊断中心的双向数据传输。
2.2 系统软件设计
系统的软件设计采用前后台系统,共有五个任务,GPS时间信息解析任务、AD采集数据任务、显示任务、无线传输任务和报警任务。在应用软件中,程序先进行时钟、串口等初始化,主程序采用协作式调度器循环查询各任务,将周期性任务也放在后台,利用STM32自带的SysTick定时器产生1ms的时标,所有任务共用该信号量,而不必每个任务都开定时器,轮询检查某任务的周期时间是否满足条件,通过调度算法确定当前任务是否就绪,当任务执行周期时间同时任务就绪且不为空才执行其相应的子任务,当中断发生时先去响应中断待中断完成后返回主程序继续轮询各任务。系统软件的总流程图如图4所示。
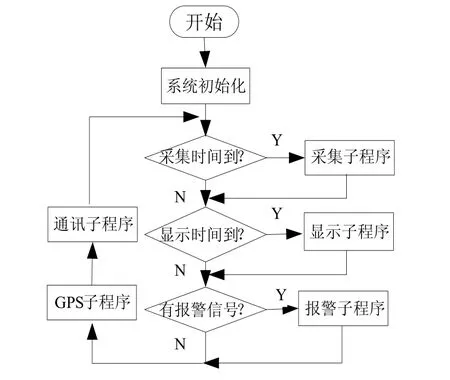
图4 系统软件总流程
当STM32进行AD采集,在AD模块和存储器之间利用DMA传输通道,将采样后的数据直接搬运到存储区中,节省了单片机的资源;在串口2接收到GPS数据时,系统将暂停所有任务去执行串口中断,解析GPS数据并为系统授时,授时完成后退出中断系统执行其他任务,使AD采集的数据与GPS时间数据建立时间上的关系。
DTU传输由GPRS网络,将采集到的压力、温度和GPS时间信息发送到诊断中心,实现采集数据网络化,此设计采用了ASCII串行传输方式,其帧格式如图5所示。此协议串口通讯时的数据共用9位,依次为8个数据位、1个停止位、无奇偶校验位。为了提高中断响应速度,串口1中断中只检查上位机发来的数据长度,只有当数据长度符合要求,各采集设备才识别地址信息,与地址信息一致的采集设备将相应的标志位置位,调用通讯子程序进行处理,否则丢弃此数据包,继续处于监听状态[7]。

图5 数据传输帧格式图
为了降低数据的传输数量,将采集到的数据放在环形缓冲区,本设计以1秒为单位将压力数据进行存储并通过对每秒采集的数据和既定的压力经验阈值相比较,假如判断为泄漏将此缓冲区的数据通过DTU按既定的数据传输格式发送到远程诊断中心,否则就向远端发送压力缓冲区的第一个数据以供监控人员了解管道实时运行情况。
GPS解析的流程图如图6所示。在应用软件中,程序先进行串口初始化,在串口中断发生时,先判断是否是数据包头“$”,当接收到“$”后打上语句更新标志,才继续接收并将信息放在相应的数组,否则放弃这帧数据;在GPS解析程序中,对接收到的数据进行解析,也是先判断是否是要解析的 “$”,若是则从“$”开始计算检验和直至“*”为止,与“*”后面的校验码字符比较,若相同则按逗号分隔符查找并解析需要的数据,还应注意的是在解析时间时,由于时区的差异,应在UTC时间上加上8小时才是准确的北京时间[8]。
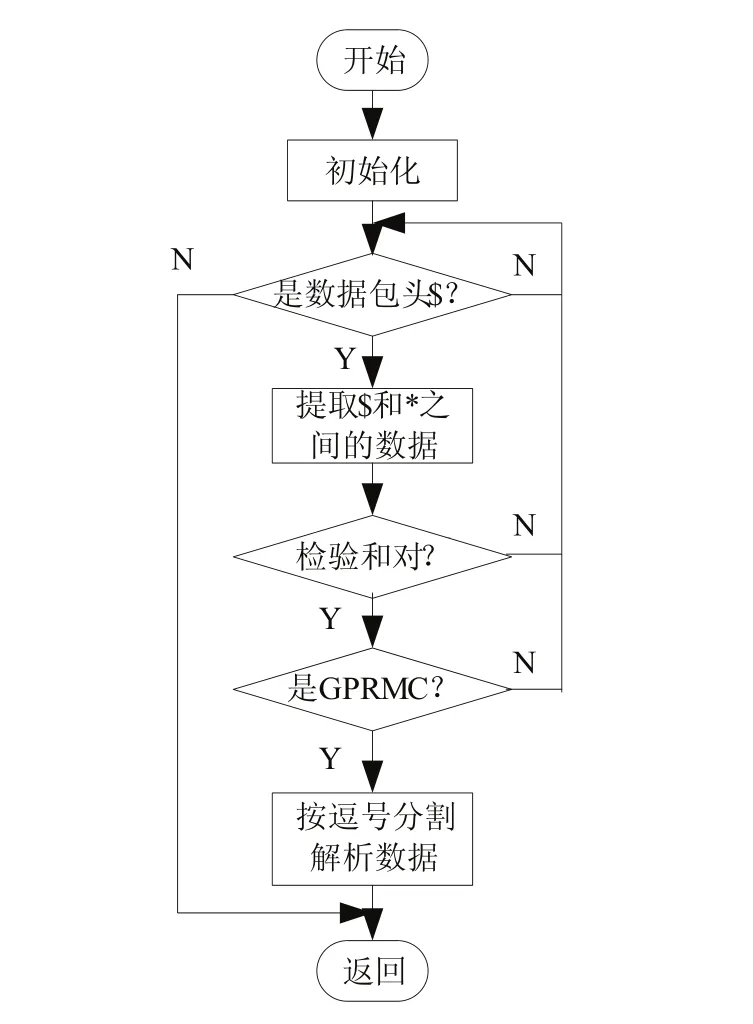
图6 GPS解析流程图
NEMA-0183协议是目前GPS模块上使用最广泛的协议,有$GPGGA、$GPGSA、$GPGSV、$GPRMC等,程序中解析具有最小数据量的GPRMC信息。其标准格式:$GPRMC<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*<13><CR><LF>。其中“$”为语句起始标志,“GPRMC”为语句识别符,“*”为检验和识别符,“<CR><LF>”为语句结束符。
3 实验验证
根据上述GPS数据授时原理,对其均间隔一小时授时一次,在实验室将两个热力站采集设备共地,将两个主控芯片的相同的扩展引脚(PD8)连接起来,让其中一个每500ms翻转一次PD8引脚电平,记录并输出当前时间戳;另一个则将此引脚设为外部中断,每中断一次就输出当前时间戳,两个设备输出时间值如图7所示。
4 结论
根据以上两个采集设备的时钟的测试,其时间同步系统的同步精度达到毫秒级,基本符合负压波测漏的时钟同步要求。在上位机对采集数据进行处理时,由于每帧格式数据位的开头都带有时间戳,保证了采集数据的起点一致,既为异地采集的数据提供了时标保证了采集数据的同步,也为后期上位机处理数据分析定位故障点减少了冗余的数据,满足了故障诊断的实时性要求。
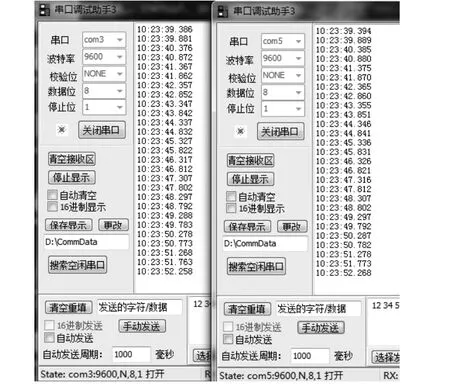
图7 串口输出图
[1]刘荣,李孝萍,马孝春.热力管道状态检测技术研究[J].煤气与热力,2011,31(2):24-28.
[2]李宏,王兰兰,张冬生,等.负压波输油管道泄漏检测技术研究[J].科学技术与工程,2011,11(2):340-342.
[3]柳战良,耿艳峰,马英.热油输送管道泄漏点定位算法的改进[J].石油学报.2008,29(3):467-474.
[4]张智.负压波检漏技术在输气管线中的应用[J].甘肃石油和化工,2012,(2):41-44.
[5]陈子健,张凯凯,王振涛,等.船舶液压系统泄漏检测与定位研究[J].机床与液压,2013,41(9):58-61.
[6]杨平,宋蜇存.基于GPS-OEM板和单片机的GPS接收机的设计[J].东北林业大学学报,2006,34(6):107-109.
[7]王嗣常,周有庆,邵霞,王娜.Modbus协议在保护测控装置内部通信中的应用[J].仪表技术与传感器,2008,(6):61-63.
[8]阳继军.基于GPS授时的地震采集系统同步系统设计[J].石油仪器,2009,23(1):80-87.
猜你喜欢
建材发展导向(2022年10期)2022-07-28
建材发展导向(2022年6期)2022-04-18
煤气与热力(2021年10期)2021-12-02
气象水文海洋仪器(2021年3期)2021-10-15
感染、炎症、修复(2021年1期)2021-07-28
装备制造技术(2020年11期)2021-01-26
现代计算机(2020年3期)2020-03-05
中国宝玉石(2018年3期)2018-07-09
数码世界(2017年5期)2017-06-06
灾害医学与救援(电子版)(2016年4期)2016-03-11