
仿生湿吸二维微力传感器设计与试验研究*
2014-09-25 08:03何斌,蔡蜜,王昆
传感器与微系统 2014年3期
何 斌, 蔡 蜜, 王 昆
(1.同济大学 电子信息工程学院,上海 201804; 2.同济大学 机械工程学院,上海 201804)
0 引 言
自然界进化出一些具有超强爬壁黏附能力的动物,它们能在任意角度的表面(如垂直表面,甚至天花板)自由爬行,在爬行过程中它们的脚掌与爬行表面之间的吸附力由法向吸附力和切向吸附力两部分组成[1]。因此,研制一种能同时进行垂直方向的粘着力测试、水平方向的摩擦力测试以及二维运动中的粘着力和摩擦力的测试的二维力传感器测试系统很有必要。本文主要介绍了电阻应变式传感器的结构设计、有限元分析、标定以及传感器测试系统设计。
1 传感器结构与传感器阵列
电阻应变式传感器由弹性体、电阻应变敏感元件及变换电路组成。研制的“L”型二维微力传感器的弹性体如图1所示。
传感器弹性体的水平梁的一端为开有一螺丝孔的凸体,用于传感器的固定。凸体的下端比水平梁突出2 mm,可以用于限位。传感器阵列上方(垂直梁的顶端的小方块处)的结构设计可以满足大的测试平面完成,适用于体型大、质量轻的爬行动物的测试,也可适用于小体型爬行动物长距离爬行运动的观察与测试。
用硬铝合金一次加工成型的弹性体,加工过程中采用线切割工艺。电阻应变敏感元件采用金属箔式应变计,将2组应变计排布在梁上应力集中的区域,即垂直梁上位置和水平梁上的腰型孔薄壁位置,如图2所示,分别用于测量被测力的2个分量(Fx,Fy)。采用腰型孔薄壁使贴片位置的局部应力水平明显提高;同时用于减轻弹性体的质量,减小传感器重力对测量结果的影响[2]。垂直梁和水平梁上的应变计的变换电路采用惠斯登全桥电路连接方式。当外加力载荷作用在该结构的弹性体时,弹性体发生变形,安装在弹性体上的电阻应变敏感元件的阻值将随之变化,接着由变换电路将电阻变化转换为电压的变化,根据电压的变化即可得知所加力载荷的大小。
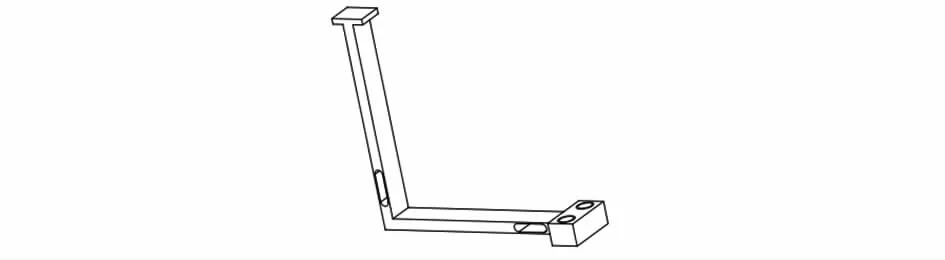
图1 传感器弹性体

图2 传感器实物图
2 有限元分析
在Solidworks三维软件中进行二维微力传感器弹性体的实体建模,初步进行应力分析,得到最佳模型后再导入到ANSYS有限元软件进行精确的有限元分析[3]。由ANSYS自由网络划分对整体进行网络划分,腰型孔薄壁这块应力集中区域则采用智能网络划分进行网格细分得到更精确的解[4]。
弹性体是通过底座的1个螺钉固定在基座上,弹性体与基座之间认为是刚性连接且将底面的全部自由度设置为零。在测试平台中心点处施加力载荷进行求解,得到应力、应变等值线或曲线图,通过分析,了解应力、应变的分布状况。
采用ANSYS后处理器提供的路径映射技术确定的贴片位置。ANSYS后处理器的路径映射技术一个强大的功能就是能够把计算出的结果数据(如应变结果)映射到模型中的任意路径上[5]。在坐标系中选择2个定义端点的节点定义路径。采用图形的方式观察结果项沿路径的变化情况(图3、图4)。通过在测试平台中心点处施加沿X,Y方向的力载荷,分别确定水平梁和垂直梁上的最佳贴片位置。
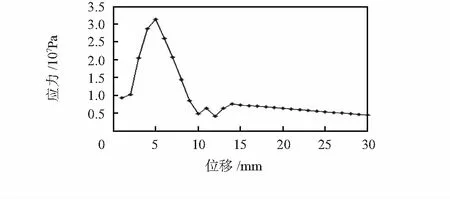
图3 沿X方向的受力分析情况

图4 沿Y方向的受力分析情况
3 二维传感器的标定
当某一力分量某方向输入量作用在传感器上时,可能会产生其他力分量方向的输出信号即产生维间耦合误差,为了消除或减小维间耦合误差,提高测试精度,需要对传感器进行标定实验[6]。标定就是建立力与电压之间的线性关系,通过加载已知砝码,得出与其对应的电压。这样,传感器在测试过程中加载未知力时,就能求解出输出电压。
二维力传感器标定系统主要由加载台、二维力传感器、砝码、计算机、信号放大和数据采集器以及直流电源组成。标定矩阵表达了二维力传感器输入与输出的线性关系。由于存在维间耦合,桥路输出电压与力的关系为
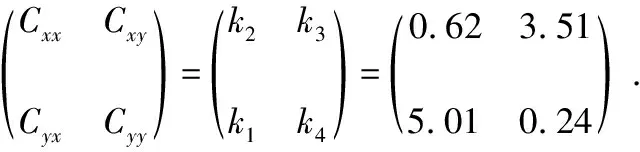
依次在X,Y方向上施加一组已知的定值载荷并同时记录X,Y方向桥路的输出电压值。得到2组4条F-U特性曲线(X方向加载砝码时,X,Y方向的输出电压变化曲线;Y方向加载砝码时,X,Y个方向的输出电压变化曲线)。X方向施力时,Fy=5.01x-0.031;Fx=0.62x+0.003;Y方向施力时,Fx=3.51y-0.021;Fy=0.24y+0.001。
特性曲线经过最小二乘法拟合,得到F-U特性曲线的斜率k1,k2,k3,k4,也就是对应标定系数矩阵中对应的系数,从而得到标定系数矩阵C为
4 传感器测试系统设计
研制的测试系统主要针对测量小体重爬行动物(例如:昆虫),爬行时足掌与接触表面的接触力,研究接触力的变化规律和如何实现吸附、脱附。该传感器阵列测试系统由二维微力传感器阵列、力加载台、信号调理电路、数据采集卡、测试分析软件软件(图形显示、数据保存)等几个模块组成(图5),可实时采集、观测爬行运动时接触力的变化情况。
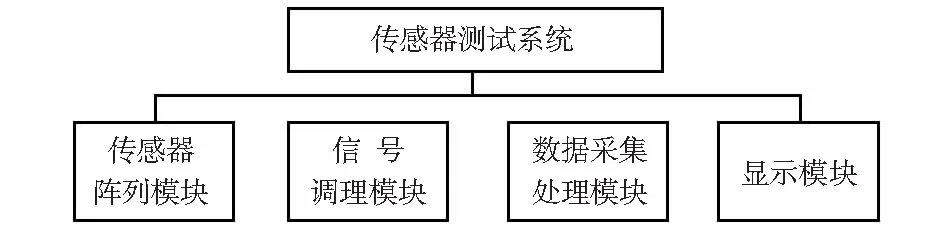
图5 测试系统组成
测试系统由软件和硬件部分组成。系统软件具有数据采集、存储、显示功能。硬件部分则由二维力传感器、力加载台、信号调理电路、数据采集卡组成。当测量对象在接触传感器阵列时,传感器感应产生的电压信号经过信号调理电路整理,进入数据采集卡进行 A/D 转换,由系统软件执行数据整理、存储和显示。基于Visual C语言开发的数据处理软件主要包括基于足垫运动的测量和力加载台的运动测量2个模块。
5 倾斜微结构湿吸力测试试验
图6为倾斜足垫及其接触表面和微结构图。
首先,采用微细电火花线切割加工制造微米尺度变截面金属沟槽,在微沟槽中浇铸聚氨酯制造湿吸足垫。
在测试之前,在接触表面上涂抹一滴水,2 min后擦拭(用以形成10 μm以内的液膜的厚度)。在湿吸足垫垂直方向上,以10 mm/s速度慢慢地像接触表面靠近,让足垫与接触表面直接达到一定的预压力;然后足垫以不同的速度、以相反的方向脱离接触表面。在整个测试过程中,微力传感器一直在测试微力信号。
在相对湿度50 %RH,无水膜条件下,对不同预压力下的黏附力进行测试。结果如图7所示,无论是法向黏附力还是摩擦力,均随预载增加而增加,并在一定范围内保持线性关系。吸附力的增加主要原因是接触面积的增加。
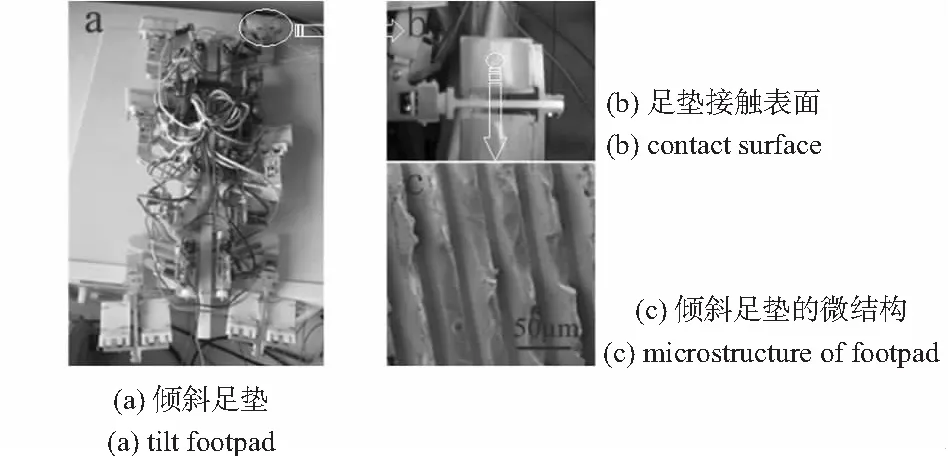
图6 倾斜足垫、足垫接触表面和倾斜足垫的微结构
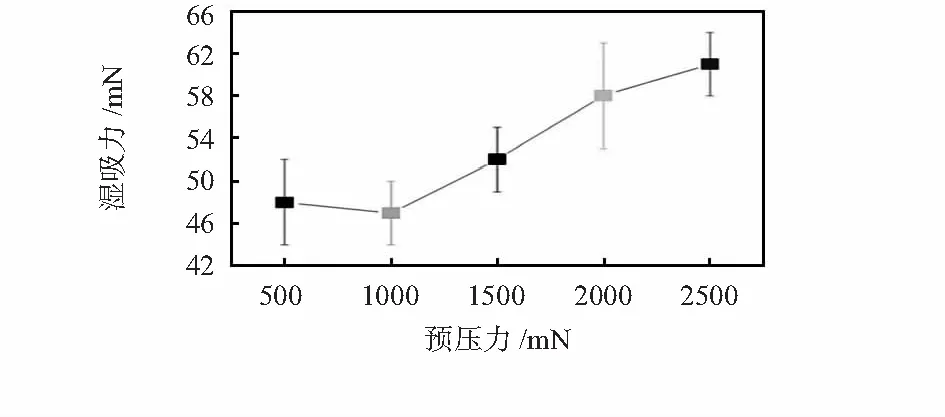
图7 不同预压力下的湿吸力
6 结束语
本文主要介绍了电阻式二维微力传感器的结构设计、有限元分析、标定。该传感器的L型的悬臂梁结构,采用应力集中原则,大大提高了应力水平。通过砝码式标定矩阵标定测试表明:该传感器量程为±1 N,分辨力优于1 mN。同时,不同预压力下的湿吸力测试试验也验证了传感器和测试系统的可靠性。
参考文献:
[1] 何 斌,周 群,岳继光,等.动物吸附机制的理论研究及应用现状[J].同济大学学报:自然科学版,2007,35(6):806-810.
[2] 朱超甫,陈虎平,刘 哲,等.测力传感器设计的应力集中原则[J].传感器世界,2001,7(12):21,22-24.
[3] 何 青.利用Solidworks提高ANSYS有限元分析效率[J].化工设备与管道,2013,50(5):24-27.
[4] 王明强,朱永梅,刘文欣,等.有限元网格划分方法应用研究[J].机械设计与制造,2004(1):22-24.
[5] 胡晓伦,陈艾荣.ANSYS路径映射技术在结构分析中的应用[J].交通与计算机,2004,22(3):86-89.
[6] 金振林,岳 义.Stewart型六维力传感器的静态解耦实验[J].仪器仪表学报,2006,27(12):1715-1717.
猜你喜欢
弹性体(2021年6期)2021-02-14
中学生数理化·中考版(2020年10期)2020-11-27
汽车维修与保养(2020年11期)2020-06-09
中学生数理化·中考版(2018年11期)2019-01-31
制造技术与机床(2017年3期)2017-06-23
中国惯性技术学报(2017年1期)2017-06-09
材料科学与工程学报(2016年1期)2017-01-15
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年5期)2016-03-22
橡胶工业(2015年3期)2015-07-29
