
水下微型位姿遥测系统设计*
2014-09-25 08:03张居成姬长琳李怀亮于文太
传感器与微系统 2014年3期
张居成, 姬长琳, 李怀亮, 于文太
(1.哈尔滨工程大学 水声技术重点实验室, 黑龙江 哈尔滨 150001;2.哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨 150001;3.海洋石油工程股份有限公司,天津 300452)
0 引 言
随着海洋开发技术的迅猛发展,水下潜器在石油勘探、深海打捞等领域的应用越来越广泛[1],已成为军事、民用领域的重要海洋探测手段[2~4],尤其在大型水下作业平台的建设和海洋探测应用中,诸如远程操控潜器(remotely operated vehicle,ROV)、水下自主航行潜器(autonomous underwater vehicle,AUV)等潜器更是发挥了至关重要的作用。在潜器与平台特定结合点进行衔接过程中,高精度的定位和姿态测量数据成为引导潜器航行和姿态调整的重要依据。由于在水介质中电磁波能量衰减极快,无线电和光学设备的作用距离受到极大的限制。借助声波在水中抗衰减的特性,水声定位技术被广泛应用于海洋开发、海底勘探等重要领域[5~8]。
本文设计了一种基于声学测量技术的微型位姿遥测系统,用于水下潜器对作业平台的位置测量和姿态估计,详细介绍了系统的构成,并分析讨论了其实际应用性能。
1 系统功能与总体组成
水下微型位姿遥测系统由声学传感器阵和电子舱组成,如图1所示。声学传感器阵一般根据潜器作业特点安装于潜器的艏部或者腹部,电子舱则安装于潜器内部与控制单元相连接。电子舱集成了控制管理、位姿解算、信号发射以及外部传感器数据融合等多重功能。在实际的水下作业过程中,微型位姿遥测系统通过与平台安装的合作信标进行声学信号的交互,完成高精度的定位和姿态测量,并将数据实时传输至潜器的控制单元。在位姿遥测系统的引导下,潜器逐渐靠近平台的指定结合点,并调整自身姿态与平台结合点进行衔接。
依赖系统的高度集成度,系统进行了微型化处理,可便捷地安装于小型潜器上。传感器阵尺寸半径为20 cm,电子舱主体设计为以20 cm为边长的正方体形状。

图1 位姿遥测系统组成图
2 系统平台设计
2.1 声学传感器阵设计
声学传感器阵采用八元平面接收阵,8个基元均匀地布放于直径为260 mm的圆周上,中心为发射基元,均采用绝缘树脂进行灌封。
2.2 中央处理器设计
中央处理器采用具有设计灵活、功能强大的FPGA实现,其丰富的管脚和内存资源、并行处理运算模型为系统设计提供了绝对的优势[9]。系统选用Altera公司生产的EP2S90F780C4系列芯片,该种芯片在资源和速度上都获得了极大的提升,为实时数据处理,高速运算奠定了基础;管脚数量也增加至534个,加强了自身的外设扩展能力;另外,锁相环数量的增加使其内部模块能够根据实际需要灵活设计工作频率。
借助于EP2S90丰富的资源,中央处理器分别连接了数据采集模块、信号发射、触发信号控制、通信接口等对外接口,以及参数存储、位姿解算、高精度时钟等内部器件,集成数据采集、系统控制和对外通信等多种功能,成为系统的中枢单元,如图2所示。

图2 中央处理器管理框图
2.3 数据采集模块设计
数据采集模块用于8通道原始数据的同步采集。采集芯片选用TI公司生产的ADS8568,最多支持8通道同时工作;采样率最高达到510 kHz(并行传输)或400 kHz(串行传输),输入信号范围可以采用编程指令控制,最大达到±12 V。
数据采集由FPGA控制ADS8568完成,如图3所示。FPGA与ADS8568通过控制信号线相互传递指令和状态信息,包括采样触发信号、采样状态指示信号、通道选择信号、读写使能信号等。最终数据由ADS8568通过并行数据总线依次传输至FPGA中。
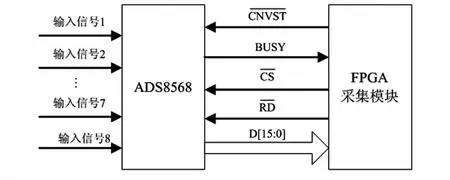
图3 数据采集模块设计图
2.4 位姿解算模块设计
位姿解算模块由多核处理芯片组成,如图4所示。处理芯片选用TI公司的DSP6416系列,其特点在于内存空间大、运算速度高、外部接口丰富。该芯片最多可以提供 1 MB的内存存储空间,并具备64位和16位并行数据总线各一套,可以进一步扩展动态存储空间[10]。主频高达720 MHz。
模块内的多核处理器具备高速并行运算能力,增强了系统的数据处理能力。位姿测量算法被分解为若干子模块,分别植入不同的核内,最终实现并行处理。第一片用于声学原始信号处理,包括噪声谱级分析、信号带通滤波、合作目标信号检测以及高精度的距离估计;第二片用于目标定位解算和多目标平面的姿态角估计;第三片则用于外部传感器数据与位姿测量数据的融合处理。为保证足够的存储空间,处理器均配备了同步动态存储器,增扩空间达到16 MB。由于各处理器间信息传输量比较小,因此,设计采用多通道缓存串口(multi-channel buffer serial port,MCBSP)串行总线方式。
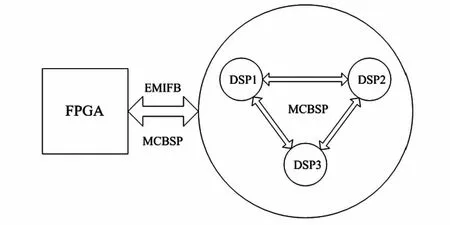
图4 位姿解算模块框图
位姿测量模块附属于FPGA,其每一个处理器均与FPGA具备并行数据和串行数据传输的能力。FPGA向位姿测量模块输送的波形数据量很高,每秒钟达到51.2 Mbits。因此,选用并行传输总线传输原始数据,并行总线宽度16位。为保证高速率传输模式的稳定性,二者采用同步传输方式,时钟由FPGA统一提供。由于在系统工作时,并行总线处于高度的占用状态,为了完成其数据和指令的传输又增设了MCBSP串行总线。位姿解算算法使用的检测参数、参考基准量以及外部传感器数据等信息均通过MCBSP接收。另外,噪声谱级、信号强度、位姿解算结果等也通过MCBSP传输至中央处理器。
2.5 对外通信模块设计
对于位姿遥测系统,对外通信模块主要用于位姿数据的输出和外部传感器数据和指令数据的输入。该部分由FPGA管理控制,其组成包括1个支持TCP协议的网络接口,4个支持RS—232和RS—422可控的串行接口,以满足不同潜器的需求。
系统外部接口均采用了光耦隔离设计,系统内外电压参考基准地是独立的,电信号传输过程中经过了光电转换,抑制了电噪声的传播,保证位姿遥测系统与潜器单元的电隔离,防止互相干扰。
2.6 信号发射与接收模块设计
发射模块采用推挽式D类功放,克服了甲类和乙类功放体积庞大、发射效率低和散热量大等缺点,解决了水下作业潜器空间小、能源少和散热不畅等困难[11]。模块采用增强型场效应管作为功率元件,采用脉冲宽度调制(pulse width modulation,PWM)方式产生驱动信号,并设计了电路匹配网络,实现功率放大器与发射传感器的匹配,扩展了系统带宽。另外,考虑到潜器输出最大电流的限制,为发射模块配备了储能电容器,保证了足够的瞬时输出功率。
信号接收单元采用滤波器与放大器交互组合的方式,避免了单级放大量过大造成的波形失真问题,也使得噪声在前级得到有效的抑制。滤波器采用抑制能力极强的椭圆滤波器,在同等电路规模条件下,其带外抑制能力比线性滤波器增强10~20 dB。
为解决位姿遥测系统远、近距离作业造成的信号强度差异大的问题,系统设计了基于继电器开关的增益控制模块,通过电平信号的驱动达到增益调节的目的。
2.7 其他模块设计
由于位姿遥测系统大多工作于无人监控模式,为便于使用增加了系统参数存储模块。所有的系统参数在每次保存后,均能及时地记录到存储器中,重新启动时自动载入系统。系统也设有指令控制协议,必要时潜器可通过相应的协议控制系统调整参数。
高精度时钟模块是系统作业的重要时间参考,采用高稳定性的铷钟,其频率精度达到±5×10-11。铷钟的稳定性体现在优良的抗温漂和抗时间老化能力。
触发信号模块是位姿遥测系统为解决声学兼容性设计的同步管理接口。潜器一般安装有各种声学设备,同频带的设备之间往往存在严重的干扰,为此,设计了同步触发接口。系统能够在潜器设定的工作时序下工作,也可以为潜器提供同步信号来触发潜器其他设备。
3 试验分析
为测试位姿遥测系统的位姿测量精度和实时处理性能,在实验室水池进行了精度测试试验和引导模拟试验。水池尺寸参数为长×宽×深=50 m×20 m×10 m。
3.1 定位精度分析
微型位姿遥测系统输出数据为相对坐标和相对姿态测量值,参考基准为系统坐标系。为验证微型位姿遥测系统的位姿测量精度,将安装有合作信标的平台布放于10 m深的水池底部,微型位姿遥测系统的传感器阵采用吊放方式悬挂于水中。系统实时测量平台中心点位置。图5为系统测量的平台中心点坐标放大图,定位起伏精度(均方误差)优于5 cm。图6~图8为系统输出的平台姿态测量值,姿态参考姿态角度标准差小于1°。平台在入水前进行了倾斜角的精确测量,测量值为纵倾角20°、横倾角0°。可以发现实际测量偏差优于3°。

图5 平台中心水平位置图

图6 平台艏向角度测量曲线
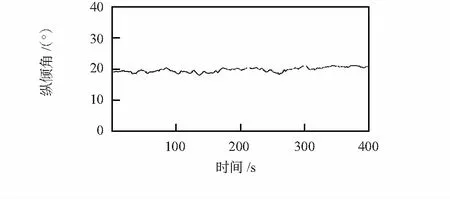
图7 平台纵倾角度测量曲线
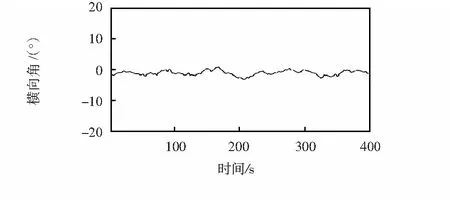
图8 平台横倾角度测量曲线
3.2 动态定位结果分析
为验证系统的运动状态的遥测性能,将系统安装于潜器上,遥测系统实时给出平台中心在潜器坐标系下的相对坐标位置,潜器根据定位坐标逐渐向对接平台靠拢。图9给出了潜器在逐渐靠近目标平台上方的水平定位坐标图(相对坐标减小即为靠近)。可以发现,系统能够进行实时测量和引导服务,测量结果稳定可靠。
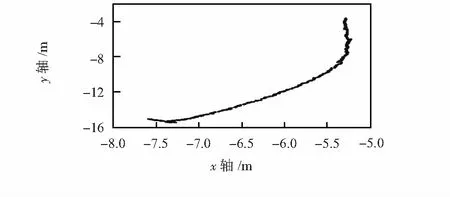
图9 潜器运动过程中目标轨迹
4 结 论
为保证高效可靠的水下作业,为潜器提供水下平台位置与姿态信息,已成为不可或缺的需求。本文利用水声测量技术设计了水下微型位姿遥测系统,实现了潜器与水下平台的远程引导和近程位姿测量。水池试验证明:其位置测量精度优于5 cm,姿态测量精度优于3°,保证了潜器与平台衔接的准确性。
参考文献:
[1] 陈 杨.水下运动目标航迹测试方法的研究[D].西安:西北工业大学,2007:1-4.
[2] 张爱军.水下潜器组合导航定位及数据融合技术研究[D].南京:南京理工大学,2009:1-4.
[3] 杨峻巍.水下航行器导航及数据融合技术研究[D].哈尔滨:哈尔滨工程大学,2012:2-6.
[4] 李开生,王文友.军用无人潜器的发展及关键技术[J].鱼雷技术, 2004,12(1):6-8.
[5] 孙大军,郑翠娥,钱洪宝,等.水声定位系统在海洋工程中的应用[J].声学技术,2012,31(2):125-132.
[6] Watanabe Y,Ochi H,Shimura T,et al.A tracking of AUV with integration of SSBL acoustic positioning and transmitted INS da-ta[C]∥OCEANS’09,Bremen,Germany:IEEE Computer Society,2009:1—6,11—14.
[7] Kilfoyle Daniel B,Baggeroer Arthur B.State of the art in underwater acoustic telemetry[J].IEEE Journal of Oceanic Enginee-ring,2000,25(1):4-26.
[8] 郑翠娥.超短基线定位技术在水下潜器对接中的应用研究[D].哈尔滨:哈尔滨工程大学,2007:12,84-87.
[9] Tuncer Adem,Yildirim Mehmet,Erkan Kadir.A hybrid implementation of genetic algorithm for path planning of mobile robots on FPGA[C]∥27th International Symposium on Computer and Information Sciences,Paris,France:Springer Netherlands,2012:459-465.
[10] 林晓静.基于TMS320C6416的并行DSP板的设计与实现[D].南京:南京理工大学,2007:12-15.
[11] 陈可钦,王永恒.一种水声应答器发射电路的设计与实现[J].通信电源技术,2013,30(3):41-44.
猜你喜欢
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
中学生数理化·八年级物理人教版(2018年3期)2018-05-31
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
现代工业经济和信息化(2016年6期)2016-05-17
少儿科学周刊·儿童版(2016年1期)2016-03-14
