
基于超声信息融合的塔机防碰撞技术研究综述*
2014-09-25 08:09,
传感器与微系统 2014年5期
,
(西安建筑科技大学 机电学院,陕西 西安 710055)
0 引 言
塔式起重机(简称塔机)是建筑行业应用范围最广的一类起重机械,主要用于建筑工地上的水平和垂直吊装,其工作特点是起吊高度高、工作幅度大。
随着城市化建设日益快速发展,高层建筑物大量涌现,塔机满载率加大,工作繁忙程度加重,布设密度越来越大。近年来,我国塔机安全事故频发,并呈上升趋势。据国家安全生产监督管理总局政府网站事故查询系统不完全统计,从2006年1月至2012年12月,国内一次性死亡3人以上的塔机较大安全事故就有68起,造成202人死亡,73人受伤[1]。这些事故的发生虽然存在着各种各样的客观原因,但最根本的一条是塔机安全技术落后[2]。早在20世纪90年代,美国、俄罗斯、乌克兰等国已普遍开始应用塔机防碰撞系统[3],并通过立法规定对没有安装防碰撞装置的塔机不允许投入使用,这对我国塔机的出口贸易形成了技术壁垒。
本文对国内外塔机防碰撞技术进行了总结分析,提出了一种基于超声检测技术和信息融合理论的主动式塔机防碰撞方法,并探讨了亟待解决的关键技术问题。
1 塔机防碰撞技术研究现状
国际上塔机制造商根据自己的产品研制配套的防碰撞系统,基本反映了国外塔机防碰撞装置的发展水平[4]。法国SMIE公司的AC30防碰撞系统[5]由中央控制器、报警器、测量传感器等组成,各台塔机的中央控制器以网络拓扑形式连接,通过实时监测塔机间的相对位置,使塔机保持安全距离。此外,AC30防碰撞系统具有区域限制保护功能。新加坡E-build公司的TAC—3000防碰撞系统特点是允许现场安全人员在地面上无线控制与更新塔机的禁行区域地图。安装在塔臂上的磁倾角传感器能将塔臂的相对姿态准确地反馈给中央处理系统,为防碰撞路径检测提供保证[6]。
近年来,随着电子技术的发展,我国在塔机防碰撞技术方面做了许多积极探索和尝试。成都新泰起重机安全公司的CXT/800系统能够实时监测网络群内塔机的工作姿态,当与其他塔机可能发生碰撞或进入禁行区域时,通过声光形式进行报警,并控制塔机动力部件输出,避免出现安全事故[7]。西安交通大学研制的塔吊群智能防碰撞系统,在施工区域中建立了一个三维直角坐标系,确定塔吊的塔身坐标位置和塔臂高度后,通过传感器检测每台塔吊工作状态,利用数传电台传送信息,进行防碰撞计算和预警[8]。
2 国内外塔机防碰撞技术存在的主要问题
综上所述,国内外塔机防碰撞系统基本构成类似,主要由中央控制器、通信网络、塔机姿态类传感器等组成[9]。在塔机的施工现场,根据施工场地具体情况, 划分出各自工作区域与禁止区域, 然后将禁止区域或塔机可能与其他物体相互碰撞的空间几何参数输入防碰撞系统,控制塔臂的旋转范围,从而预防碰撞事故的发生,其工作原理如图1所示。
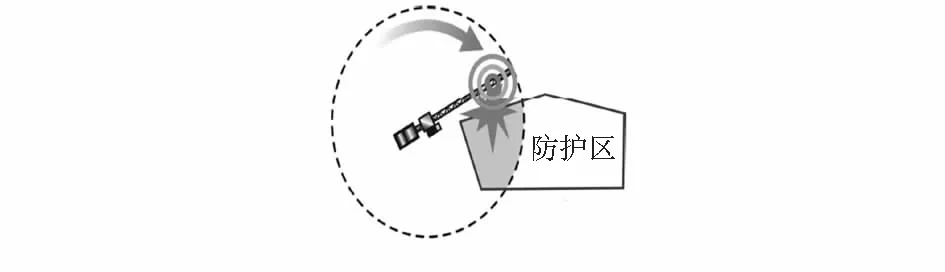
图1 塔机防碰撞系统工作原理示意图
鉴于上述塔机防碰撞系统对其周边障碍物信息的感知是一种被动式获取方式,故将其称为被动式防碰撞系统。该类防碰撞系统的技术特点是只监测塔机自身的运动状态,而不涉及周围障碍物的主动监测,在实际使用中存在诸多不足:
1)建筑施工现场塔机工作区域和禁止区域可能随工况会经常相互转换,有时这种转换很突然,被动式防碰撞系统在应对这种变化灵活性欠缺。
2)塔机操作人员如果要对工作区域与限制区域作适当改变则需要人工更新环境地图,重新设定系统参数,耗时耗力,限制了塔机操作人员的主观能动性,大大降低了塔机运行效率。
3)当其他未监测的移动物体进入塔机允许的工作区域后,防碰撞系统将会失效。
因此,本文针对国内外塔机防碰撞技术中存在的问题,研究一种用于塔机防碰撞的主动式障碍物检测技术,能够在设定的范围内识别障碍物,使塔机具备“视觉”功能,让它“看见”其他塔机和障碍物的运动,使塔机灵活主动地适应现场的变化,对塔机运行行为进行预估计、计算决策,提高塔机碰撞监测水平,降低塔机碰撞事故的发生,使塔机安全、高效运行。
3 障碍物检测技术
目前,障碍物检测技术已广泛应用于工业的各个领域,例如:机器人系统、汽车辅助驾驶和物料位置检测等。这里着重分析常用于障碍物检测的红外检测技术、雷达检测技术、视觉检测技术和超声检测技术。
红外检测技术的原理是利用障碍物表面的红外光线进行障碍物的检测。其优点是检测无盲区、测量精度高、反应速度快,适合于检测近距离的物体[10];其缺点是受环境影响较大,由于室外太阳光的影响,容易使得红外接收传感器产生错误判断。
雷达检测技术根据其使用的电磁波波段,可分为激光雷达技术和毫米波雷达技术。激光雷达技术波束能量集中、传输距离远、精度高,但是对气候适应能力较差,价格昂贵[11]。毫米波雷达测障性能稳定,环境适应性能好,受恶劣天气干扰较小,但其硬件结构复杂,成本昂贵,一般用于军事领域和车载防碰撞系统[12]。
视觉检测技术能够提供丰富的环境信息,其工作原理是利用CCD视觉传感器获取障碍物的图像信息。视觉检测技术缺点是受光照、粉尘、烟雾及雨雪天气等环境因素的影响较大,无法适应塔机恶劣工作环境。此外,该技术图像处理算法较为复杂,数据计算量较大,很难适应塔机防碰撞系统的实时性要求[13]。
超声检测技术具有纵向分辨率高,适合中长距离非接触测量;对色彩、外界光线不敏感;不受电磁影响,能适应恶劣环境;操作简单、成本低廉、处理速度快等优点,但易受环境温度影响,作用距离较短[14]。
结合塔机防碰撞工作特点,笔者认为超声检测技术作为主动式塔机障碍物检测技术是可行的,主要在于:
1)超声传感器实时性、可靠性好,中短距离超声波测距产品已在市场上成功推广。
2)由于塔机经常会因施工进度问题在夜间施工,工作时会伴随着噪声、大雾、阴雨天气等恶劣因素,要求测障传感器能适应恶劣环境。超声传感器具有低成本、无需现场维护的特点,使之非常适合于布置在环境恶劣或人类不易到达的区域。
3) 超声传感器节点相互之间和超声传感器节点与数据融合中心可以通过无线网络传递数据和交换信息,适合多源信息获取和融合技术实现。
4 基于超声信息融合的塔机防碰撞方法
塔机的防碰撞主要是塔机与周围固定障碍物、高压线的碰撞或塔机群中塔机与塔机之间的相互碰撞。准确、快速地探测障碍物是实现塔机防碰撞的必要前提,也是影响防碰撞性能的关键因素。基于超声的障碍物探测主要涉及超声测距、障碍定位等研究内容。其中超声测距是基础,障碍的定位是超声测障技术中的难点。
基于超声信息融合的塔机防碰撞方法流程如图2所示。首先,采用多超声传感器融合技术进行塔机周边障碍物的监测,获取障碍物的二维平面位置信息。根据超声波传感器的探测模型,经过超声回波的时间序列融合,构造出障碍物的形体信息。通过障碍物运动轨迹预测和已有超声地图数据,获取障碍物运动信息。利用主动式塔机防碰撞数学模型,联合小车变幅参数、塔机回转参数、吊重起升参数,进行齐次坐标变换信息融合,完成障碍物的空间定位,提取塔机碰撞预警信息,并进行评估、决策。
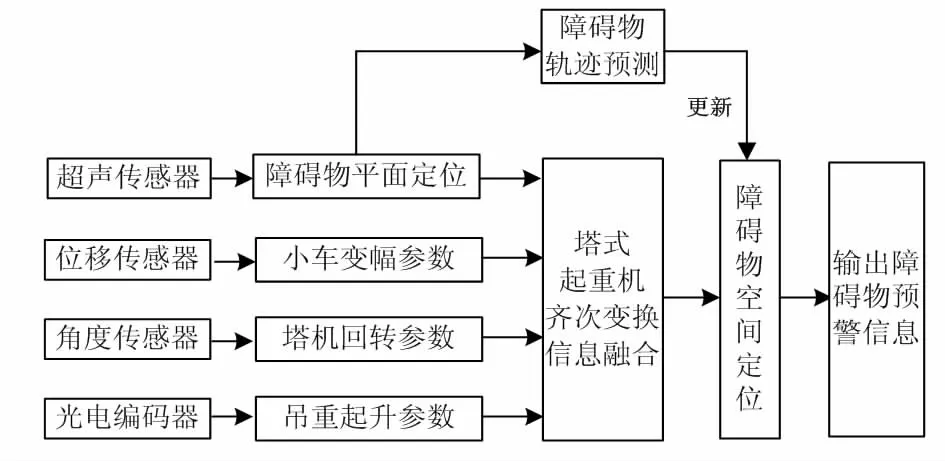
图2 塔式起重机防碰撞技术流程图
4.1 远距离超声传感技术
综合分析塔机回转速度、转动惯量以及控制系统或操作人员的反应能力,塔机防碰撞预警范围在20~30 m范围内有实际意义。现有工业应用领域的超声测距系统检测距离较近(一般小于10 m),不满足塔机防碰撞预警测量的需要。
美国AIRMAR公司生产的Airducer AR30超声波测距系统作用距离可达30 m,但价格十分昂贵,很难大范围使用[15]。国防科技大学潘仲明根据超声波和压电材料的物理特性,并应用声学和电路匹配技术,成功研制了谐振频率为24.5 kHz的大作用距离压电圆盘式超声波换能器,其作用距离超过了32 m[16]。2009年,国防科技大学祝琴等人[17]采用了新型超声换能器驱动电路和对回波信号进行实时采集、处理的新方法,使测距量程也超过了32 m。
笔者开发了检测距离为30 m的远距离超声测距系统,如图3所示。该系统以快速单片机为微控制器,连续发射若干超声波脉冲序列,经过超声发射模块放大为高压脉冲序列激励超声传感器发射超声波。发射的超声波遇到障碍物后返回微弱超声回波,经过信号调理模块进行放大、滤波处理。发射控制信号和调理后的超声回波信号经同步数据采集卡采集后,通过数据总线传输记录在计算机上,利用测距算法测量出超声波飞行时间,从而获得待测距离。
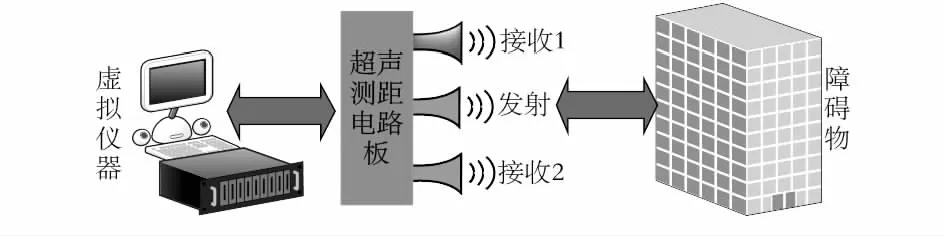
图3 远距离超声测距系统示意图
结合塔机防碰撞系统的特点,对超声测距的稳定要求较高,需要进一步提高超声探测距离,可采取以下措施:1)提高超声激励功率;2)加装超声号筒,减小扩散损耗,增强回波强度;3)研究远距离微弱超声回波信号检测算法。
4.2 基于多超声传感器的障碍物定位技术研究进展
超声定位技术主要是运用仿生学,借鉴蝙蝠的“回声定位”原理,利用超声波良好的反射特性获取前方障碍物的信息。但其波束角较大,只能获取障碍物的距离信息,仅靠单一超声传感器很难对周围环境进行探测,通常应用多传感器信息融合方法。越来越多的研究学者着手于如何从超声传感器获取的粗略信息中,提取出更多可靠的障碍信息。但研究成果集中在机器人导航、汽车避障等领域,在塔机防碰撞上的应用尚未报道。
澳大利亚Monash大学的Mckerrow P J等人[18]的研究小组应用Series 700超声传感器组成双发双收声纳,形成双声束系统,用于障碍物方位角的测量和可靠的障碍物区分。韩国Pusan大学[19]的研究团队利用UM30超声传感器,设计了一种ABS (active beacon sensor)导航基站,用于障碍物标识和机器人导航。英国Strathclyde大学的Guarato Francesco等人[20]设计了一发两收的超声测量装置,用于三维空间的障碍物定位。
根据塔机臂做圆弧运动的特点和超声检测技术的需求,笔者研究团队构建了基于多超声传感器的塔机防碰撞实验系统,如图4所示。但有如下问题需要深入研究:1)建立超声传感器的三维探测模型,提取障碍物的基本形体信息;2)利用扩展卡尔曼滤波融合,研究障碍物运动轨迹预测算法。

图4 基于超声信息融合的塔机防碰撞实验系统
4.3 塔机防碰撞算法研究进展
塔机要保证建筑材料的准确及时吊运到位,解决群塔之间的防碰撞和避障问题,需要在超声测距、定位和障碍物运动轨迹预测的基础上,研究塔机的防碰撞算法。
韩国Lee Ghang等人[21]针对塔机防碰撞系统存在监控盲点的问题,将建筑物的BIM模型与多传感器信息相结合,为操作人员提供图形化的三维信息。吕广明等人[22]利用齐次变换和包围盒技术来作为系统的防碰撞算法,以ODBC管理的Access为数据库开发新一代群塔作业防碰撞和监视系统。陈龙等人[23]对塔机工作区域内障碍物进行了建模分析,通过在障碍物周围设置减速调整区域来实现区域保护。
笔者拟结合信息融合理论与机器人工程学,根据塔机运动部件的运动学特性,建立基于超声检测技术和信息融合理论的塔机防碰撞数学模型,监测塔机主要运行参数,利用虚拟现实技术实时三维立体显示塔机运行姿态和超声传感器监测到的周围环境信息,对塔机运行状态进行评估预警。
5 结束语
本文总结分析了现有塔机防碰撞产品存在的问题,提出了基于超声检测和信息融合的主动式塔机防碰撞方法,为塔机防碰撞技术提供了新思路。由于采用超声波传感器实现塔机安全测障是一个前沿课题,运用超声波进行塔机远距离障碍物的主动式检测技术仍处于研究阶段,在应用、推广和实用化方面需要进一步完善。
参考文献:
[1] 国家安全生产监督管理总局网站.事故查询系统[DB/OL].(2012—12—28)[2013—04—10].http:∥media.chinasafety.gov.cn.
[2] Vivian W Y Tam,Ivan W H Fung.Tower crane safety in the construction industry:A HongKong study[J].Safety Science,2011,49(2):208-215.
[3] Mohamed Al-Hussein,Muhammad Athar Niaz,Yu Haitao.Integrating 3D visualization and simulation for tower crane operations on construction sites[J].Automation in Construction,2006,15:554-562.
[4] Smith C John.Quality is key to safe[J].Crane Today,1998(3):26-28.
[5] Moon Sungwoo,Bernold Lconhard E.Graphic-based human-machine interface for construction manipulation control[J].Journal of Construction Engineering and Management,2008(7):305-311.
[6] Yehiel Rosenfeld,Aviad Shapira.Automation of existing tower cranes:Economic and technological feasibility[J].Automation in Construction,2007,7(4):285-298.
[7] 成都新泰建筑机械公司.[EB/OL] .(2011—04—26)[2013—11—08].http:∥www.cranesafety-china.com.
[8] 西安智敏测控科技公司. [EB/OL].(2011—04—26)[2013—05—07].http:∥www.zm-autovision.com.
[9] Baburn Aliams,Varghese K.Collision free path planning of co-operative crane manipulators using genetic algorithm[J].ASCE,2005,19(2):182-193.
[10] Liu Lei,Huang Zhijian.Infrared dim target detection technology based on background estimate[J].Infrared Physics & Technology,2014,62:59-64.
[11] Deodato Tapete,Nicola Casagli,Guido Luzi,et al.Integrating radar and laser-based remote sensing techniques for monitoring structural deformation of archaeological monuments[J].Journal of Archaeological Science,2013,40(1):176-189.
[12] Ebi Jose,Martin Adams,Stephen John Mullane,et al.Predicting millimeter wave radar spectra for autonomous navigation[J].IEEE Sensors Journal,2010,10(5):960-971.
[13] Kang S C,Chi H L,Miranda E.Three dimensional simulation and visualization of crane assisted construction erection processes[J].Journal of Computing in Civil Engineering,2009,23(6):363-371.
[14] 冯 诺.超声手册[M].南京:南京大学出版社,1999:26-27.
[15] Airmar Technology Corporation[EB/OL].(2012—10—10)[2013—06—01].http:∥www.airmartechnology.com.
[16] 潘仲明,简 盈,王跃科.大作用距离超声波传感技术研究[J].传感技术学报,2006,19(1):207-210.
[17] 祝 琴,王 琪,刘 浩.大量程超声波测距系统[J].兵工自动化,2009,28(8):35-37.
[18] McKerrow P J,Antoun S,Worth P.A software architecture for mobile robot navigation[C]∥Proceedings TAROS’08,2008:185-192.
[19] Kim Sung-Bu,Lee Jang Myung,Lee I O.Precise indoor localization system for a mobile robot using auto calibration algorithm[C]∥The 13th International Conference on Advanced Robotics,Jeju, Korea,2007.
[20] Guarato Francesco,Windmill James,Gachagan Anthony.A beam-based method for target localization:Inspiration from bats’directivity and binaural reception for ultrasonic sonar[J].Acoustical Society of America,2013,133(6):4077-4086.
[21] Lee Ghang,Cho Joonbeom,Ham Sungil,et al.A BIM and sensor-based tower crane navigation system for blind lifts[J].Automation in Construction,2012,26:1-10.
[22] 吕广明,李洪亮.基于齐次变换的群塔作业防碰撞技术研究[J].中国工程机械学报,2009,7(1):114-117.
[23] 陈 龙,周见行,姜 伟,等.塔机障碍物避让算法的研究[J].机电工程,2011(9):1056-1059.
猜你喜欢
建筑机械化(2022年3期)2022-04-20
科学与财富(2021年33期)2021-05-10
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
科学(2020年3期)2020-01-06
测控技术(2018年5期)2018-12-09
电子制作(2017年7期)2017-06-05
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10
太空探索(2014年1期)2014-07-10
