基于视觉传感器的道路前方车辆模型研究
2014-09-25 08:19陈勇,陈瑶
传感器与微系统 2014年9期
陈 勇, 陈 瑶
(1.西北工业大学 软件与微电子学院,陕西 西安 710072;2.北京工业大学 计算机学院,北京 100124)
0 引 言
建立图像平面的前方车辆模型是基于视觉传感器的道路前方车辆检测的重要内容。现有文献利用线段或者区域构建图像中的车辆二维模型。文献[1]将线段连接成多边形来模型车辆,其包含8条线段和8个点参数,并利用边缘方向概率密度函数约束模型的形状,该模型参数较多、计算量较大;文献[2]根据车辆外形将车辆模型为二维平面的矩形盒子;文献[3]的车辆模型由5条直线组成;而文献[4]基于车辆前方和后方的结构将车辆模型为矩形和梯形结合体,其定义了车辆宽度、下半部和上半部高度3个参数;文献[5,6]将图像中前方车辆模型为简单的矩形。这些车辆模型相对简单参数较少,但是用于前方车辆检测本文提出了一种前方车辆模型,利用前方车尾轮廓的几何特征构建了世界坐标系的车尾模型,通过坐标系变换给出了视觉传感器坐标系的车尾模型,进而导出了图像中的车尾模型,并给出了模型参数的表达式及其与现实世界中车尾几何参数的对应关系,同时将图像中车辆的位置和大小联系了起来。通过实验将该模型应用于道路前方车辆检测,可以抑制不符合车辆透视关系的错误识别,验证了模型的有效性,表明该模型能有效提高车辆检测的鲁棒性。
1 道路前方车辆车尾模型
车辆检测系统中车载视觉传感器面向主车正前方,主车沿车道行驶,前方车辆尾部距离主车最近,而被其它车辆遮挡的前方车辆,不会对主车造成直接威胁,其尾部图像也会被部分遮挡。因此,建立车尾模型可以满足道路前方车辆检测的需要。
1.1 世界坐标系的车尾模型
如图1建立世界直角坐标系OwXwYwZw,原点Ow为车载视觉传感器光学中心,平面OwXwZw与道路平面平行,坐标轴OwZw与视觉传感器的光轴位于同一垂直平面。
当车辆沿车道行驶,其与车道方向的夹角很小,可忽略不计。对于结构化道路,在视距内车道线形近似为圆弧,设Rhost表示主车行驶曲线的半径。如图1,前方车尾及其路面上的阴影边界会形成一个近似的矩形区域,设该区域的高和宽分别为HV和WV,视觉传感器离路面的高度为HC,(xw,yw,zw)表示世界坐标系的坐标点,(xw,V,yw,V,zw,V)表示车尾矩形区域下边界的中点,并定义其表示该区域和车辆的位置。设DV,lon表示前方车辆到主车的纵向行驶距离,DV,trans表示前方车辆到主车行驶线的横向距离,θV表示前方车辆和主车行驶方向的夹角,则由图1可构建世界坐标系OwXwYwZw的前方车尾矩形区域的模型方程
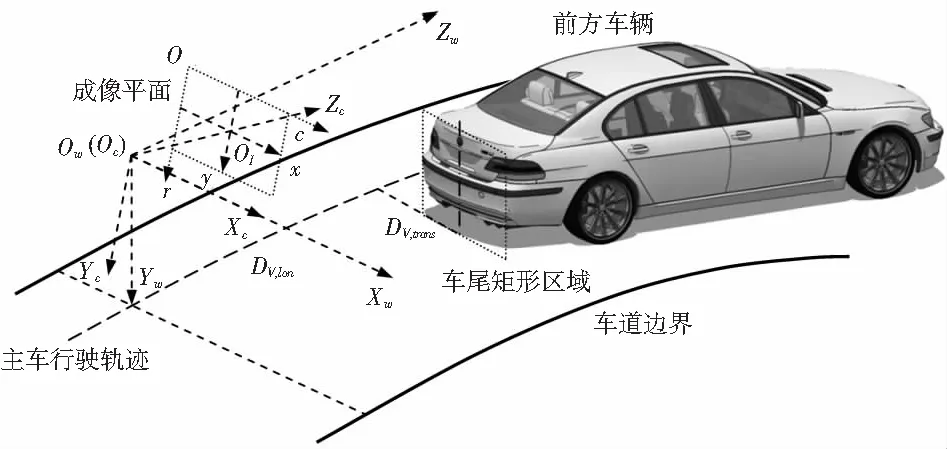
图1 车辆的坐标系
(1)
根据车道设计规范[7],在有效视距内,θ较小,车尾矩形区域平面近似平行于平面OwXwYw,该近似造成的误差远小于前方车辆与主车的距离,由此车尾模型方程(1)可简化为
(2)
1.2 视觉传感器坐标系的车尾模型
如图1建立视觉传感器直角坐标系OcXcYcZc,坐标轴OcZc为视觉传感器的光轴,坐标平面OcZcYc与平面OwYwZw重合,视觉传感器的偏向角β和滚动角γ为0,为了观测前方车辆全貌,其前倾角α设置的很小,有sinα≈α和cosα≈1。进而根据图1中世界坐标系和视觉传感器坐标系的几何关系,可将式(2)变换为视觉传感器坐标系的车尾模型
(3)
1.3 像素坐标系中的车尾模型
如图1在视觉传感器的成像平面建立图像直角坐标系OIxy,光轴OCZC垂直于平面OIxy并交于原点OI,设fC表示视觉传感器的焦距;同时建立像素平面直角坐标系Ocr,成像平面的左上角为原点O,坐标轴Oc和Or分别与坐标轴OIx和OIy平行。设(c,y)表示像素点坐标,(COI,rOI)表示像素坐标系中点OI的坐标,并设像素点在x和y轴方向上的物理尺寸为dx和dy,则由式(3)通过坐标系变换可得像素坐标系的车尾模型
(4)
其中
(5)
从式(4)可看出,当滚动角γ=0时,车尾矩形区域在像素平面的模型为梯形,其腰斜度与b0,P,b1,P,b2,P有关。
2 图像中车辆位置与宽度的关系
式(4)中b3,P和b4,P是像素平面车尾区域的上下边界,与平面中车辆的垂直位置有关,而b1,P和b2,P与车辆宽度WV有关。由于前方车辆与主车方向的夹角θV较小,根据式(4)和式(5)有
(6)
由于车辆宽度有一定的范围,设其最大和最小值分别为WV,max和WV,min,则车尾模型有如下约束条件

(7)
对于一个特定的车辆检测系统,上式中的b4,P为像素平面车辆的垂直位置。因此,式(7)表达了图像中车尾矩形区域大小与其位置的变化关系。
通常情况下视觉传感器前向水平设置,此时式(4)可简化为
(8)
其中
(9)
约束条件式(7)可简化为
WV,mindy(b4,P-rOI)/(HCdx)≤b2,P-b1,P≤
WV,maxdy(b4,P-rOI)/(HCdx).
(10)
从式(8)可看出:当视觉传感器水平设置时,图像中车尾区域始终为矩形,其宽度为(b2,P-b1,P),从式(10)可看出:图像中车辆的宽度与其垂直位置有线性关系。
3 实 验
将本文模型应用于前方车辆检测系统,道路图像为480像素×272像素。图2是利用矩形模型和本文模型的检测结果对比。图中道路左边的窗户具有车尾矩形区域特征,图2(a)是利用矩形车辆模型[5,6]和垂直水平边缘、对称性等特征检测到的车辆区域,其中窗户被错误地检测为车尾。表1给出了图2(a)中3个区域的位置、宽度以及同一位置本文模型的宽度范围,可看出图2(a)左边检测结果区域不符合本文模型。将本文模型应用于上述车辆检测系统中,结果如图2(b)所示,可看到利用本文车辆模型能够有效滤除图像中不符合车辆透视关系的非车辆区域。
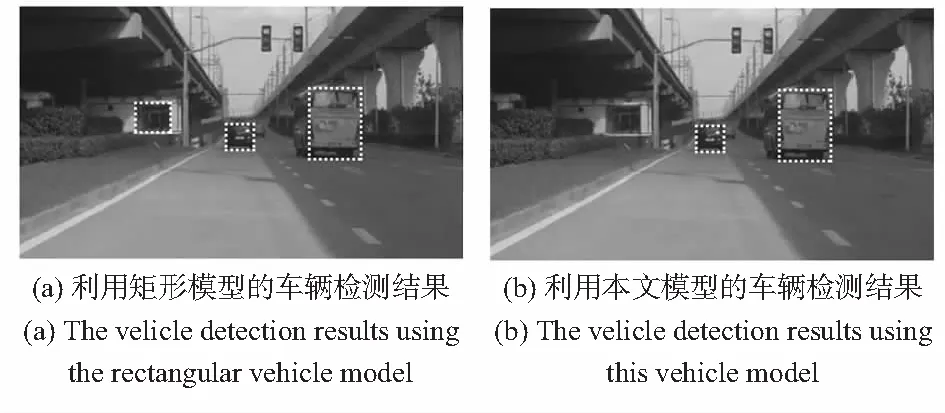
图2 利用矩形和本文模型的车辆检测结果
4 结 论
本文利用前方车尾轮廓的几何特征构建了世界坐标系的车尾模型,然后通过坐标系变换给出了视觉传感器坐标系的车尾模型,进而导出了图像车尾模型,并给出了模型参数的表达式及其与现实世界中车尾几何参数的对应关系,同时将图像中车辆的位置和大小联系了起来。实验表明:该模型应用于车辆检测系统可以抑制图像中不符合透视关系的错误车辆识别,能有效提高车辆检测的鲁棒性。
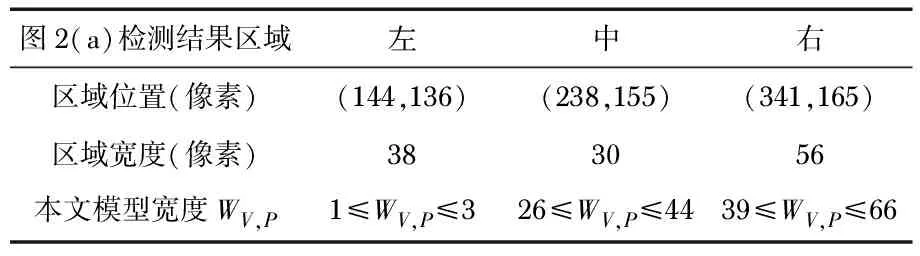
表1 图2(a)检测结果与本文模型的宽度对比
参考文献:
[1] Jolly M P D,Lakshmanan S,Jain A K.Vehicle segmentation and classification using deformable templates[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1996,18(3):293-308.
[2] Dellaert F,Thorpe C.Robust car tracking using Kalman filtering and Bayesian templates[C]∥Proceedings of SPIE on Intelligent Transportation Systems,The International Society for Optical Engineering,1998:72-83.
[3] Sahli H,Mertens M J W,Cornelis J P.Model-based car tracking through the integration of search and estimation[C]∥Proceedings of SPIE on Enhanced and Synthetic Vision,International Society for Optical Engineering,1998:160-166.
[4] Arturo D L E,Armingol J M.Vehicle detection and tracking for visual understanding of road environments[J].Robotica,2010,28(6):847-860.
[5] Hsieh J W,Chen L C,Chen D Y.Symmetrical SURF and its applications to vehicle detection and vehicle make and model recognition[J].IEEE Transactions on Intelligent Transportation Systems,2014,15(1):6-20.
[6] 朱 勇,付彦君.基于多特征融合的车辆检测算法[J].传感器与微系统,2009,28(8):110-112.
[7] 中华人民共和国交通部.JTG D20—2006.公路路线设计规范[S].北京:人民交通出版社,2006.
猜你喜欢
汽车观察(2021年4期)2021-05-10
数学年刊A辑(中文版)(2020年2期)2020-07-25
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
故事会(2009年14期)2018-09-03
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中学生数理化·八年级数学人教版(2017年4期)2017-07-08
中等数学(2017年2期)2017-06-01
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
小品文选刊(2009年17期)2009-11-02