深海漂浮式风力机研究及最新进展
2014-09-25 03:44:28高伟,李春,叶舟
中国工程科学 2014年2期
高 伟,李 春,叶 舟
(1.上海理工大学能源与动力工程学院,上海 200093;2.大唐集团华创风能有限公司技术研究院,山东青岛 266000)
深海漂浮式风力机研究及最新进展
高 伟1,2,李 春1,叶 舟1
(1.上海理工大学能源与动力工程学院,上海 200093;2.大唐集团华创风能有限公司技术研究院,山东青岛 266000)
海上风电场建设是风力发电技术的最新方向,随着近海风场深入开发,风场建设从近海到远海是其未来必然的发展趋势,随着海水深度的增加,风力机必须采用漂浮式平台作为基础。本文较为系统地考察了国外深海漂浮式风力机的早期历史、现状及最新研究进展,其中着重介绍了其理论分析、系统仿真和水动力学实验方面的研究,并进一步指出现有研究的种种不足,据此提出新的研究方向和设想。
深海;漂浮式风力机;系统仿真;水动力实验
1 前言
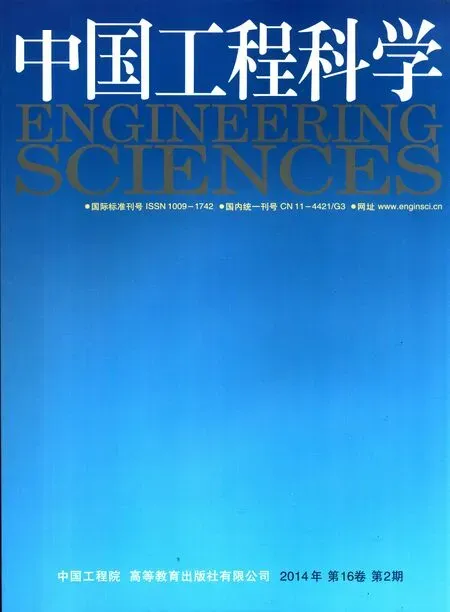
海上风电场建设是风力发电技术的最新方向,但按照目前近海风电场所采用的各种固定于海底的贯穿桩结构的传统方法,整个风力机基础的成本将随着海水深度增加而急剧上升,使深海风电场建设在经济上变得不可行,而将风力机安装在漂浮式平台是解决这一问题的有效途径。因此,未来风电场建设的必然趋势是“由陆向海、由浅到深、由固定基础向漂浮式平台”[1],如图1所示。
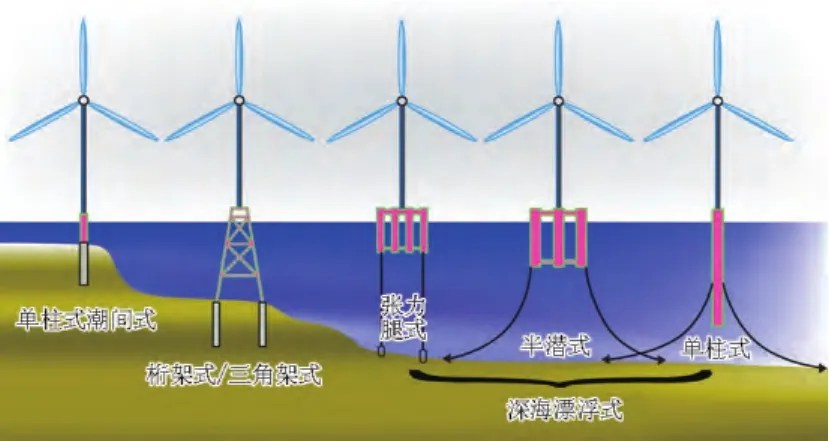
图1 海上风力机的发展趋势Fig.1 The trends of the offshore wind turbine
同时,多兆瓦级深海漂浮式风力机是一种具有战略意义的新能源形式,对于充分利用我国广阔的海洋国土,缓解我国的能源分布格局与能源需求存在着巨大矛盾具有重大的意义。
2 漂浮式风力机早期研究历史
美国马萨诸塞大学安默斯特分校的Heronemus在1972年最早提出海上大型漂浮式风力机概念[2]:将很多小型风力机集合安装在一巨大的浮动平台上(如图2所示)。20世纪80年代,美国FloWind公司与美国桑迪亚国家实验室合作分别开发了100 kW和300 kW漂浮式垂直轴风力机,在美国加州两大型风电场生产、安装、运行了500多台低成本的漂浮式垂直轴风力机,累计达170 MW[3],但因该项目在美国加州政府1986年取消对风电补贴后基本陷入停滞。
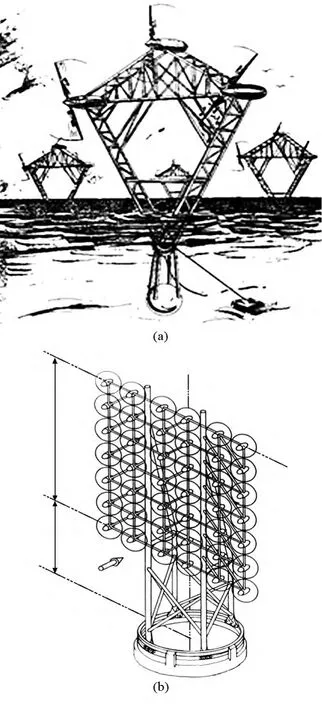
图2 Heronemus海上大型漂浮式的风力机概念Fig.2 Heronemus’s conceptual design of large-scale offshore floating wind turbine
随着大型现代水平轴风力机技术与工程实施经验的逐步成熟,1988年,英国南安普敦大学的Satchwell在英国皇家航空学会论坛海上风电大型项目研讨会上指出,随着未来海上风力发电发展,必然会采取漂浮式平台安装技术[4]。1991年英国贸工部率先资助了大型漂浮式水平轴风力机的项目研究[5],克威尔内油气公司的Tong从技术和经济性两方面考察独立的海洋工程平台安装大型水平轴风力机以及在英国北海地区布置9台风力机组成的海上风电场的可行性[6]。英国斯特拉思克莱德大学的Barltrop则设想在不同的锯齿型浮体平台结构上安装数个风力机(见图3a),构成所谓的多单元海上漂浮式风电场,研究了风力机不同布置方式对气动性能的可能影响[7];意大利学者们则提出了在水深30~100 m区域选择使用环形漂浮体结构Eolomar平台(见图3b),并在该漂浮平台上安装数台风力机[8],由于实施成本高昂,以上方案仅停留在项目设想和概念设计阶段。
图3 多单元海上漂浮式风电场Fig.3 Multi-unit floating offshore wind farm
3 漂浮式风力机研究现状
最近十多年比较有代表性的漂浮式风力机概念设计详见文献[9]。由此可知,目前漂浮式风力机研究主要集中在欧洲北海附近国家、美国和日本,我国此方面的理论研究尚属起步阶段。
3.1 漂浮式风力机在欧洲的研究
1998年,英国伦敦大学学院的Halfpenny开始从系统整机建模和水动力学角度研究海上风力机,并借鉴海洋工程的频域分析方法,对浅海和漂浮式风力机水动力学特性进行分析,可以看做是现代漂浮式风力机理论研究的先声[10]。2000年,Henderson延续前者的研究工作,指出单一的漂浮体结构安装风力机的方法,在减少平台和系泊系统运动响应有较大的优势[11],此后的漂浮式风力机基本上都倾向于采用独立平台设计。2006年,英国斯特拉思克莱德大学的Vijfhuizen进一步设计了一个基于驳船平台的5 MW的风力发电机系统[12],其特点是可以结合其他形式海洋能源进行发电。
2002年,荷兰能源研究中心、荷兰海洋工程研究院和荷兰代尔夫特大学等机构共同发起Drijvende漂浮式风力机研究项目[13],即荷兰三角架平台漂浮式风力机概念设计项目,利用QUAESTOR知识库系统,采用基于频域算法的响应振幅算子(RAOs)作为平台设计分析的主要参数,建立平台运动模式的六自由度刚体振幅标准偏差模型。后来很多研究者延续这个概念设计,或者采用偏心式布置风力机,直接将风力的塔架作为平台支架的一部分,或采用更多浮柱增加平台稳定性,如Blue-H漂浮式风力机就是采用6个柱子的漂浮式平台[14]。作为该项目工作的延续,文献[15]通过计算叶片的空气动力荷载和惯性荷载,研究了漂浮式平台结构运动对整个风力机系统的影响,发展了计算漂浮式平台结构运动引起的疲劳载荷和极端荷载的分析方法。
2005年,丹麦技术大学的Chen Zhenzhe对美国可再生能源国家实验室(NREL)张力腿(TLP,tension leg platform)、荷兰三角架平台和日本浮柱(spar)3种深海漂浮式平台进行了平台结构在风力机和波浪荷载作用下动力响应特性对比研究[16],其结构动力学模型采用二维集中质量模型方法,气动模型采用简单的动量叶素理论,水动力模型在分别采用规则线性波和“北海联合海浪计划”不规则浪谱方法。研究表明:在不规则波环境下,平台结构的最大响应是由风力机气动荷载的基频分量引起的;由于漂浮式平台结构的运动,作用在风力机上的风速波动将引起输出功率的波动,此为海上风电机组浮式基础结构设计的最大挑战[17]。Psichogios在后续的研究中,主要利用水池实验研究了TLP平台的水动力特性,研究发现:模型可承受5.5 m/s稳态风和1.4~3.8 m/s阵风不至倾覆,倾覆角与水深高度相关,原因是由于张力腿的刚度随着深度变化而变化;风力机所受的气动力与理论计算值相近,但发电功率远小于理论计算值,可能由于传动轴的摩擦力偏大造成[18]。在此项研究基础上,Ramachandran等进一步研究TLP平台耦合风浪载荷的三维响应特性[19]。Akin则利用丹麦水利研究所开发的MIKE 21 SW软件,对布置在北海德国湾深水海域海上风力机极端风况与波浪载荷进行研究,并将研究结果与HAWC 2软件计算结果进行比较,研究结果表明:在稳态风和规则波条件下,两者计算值可以控制在20%以内,当采用湍流风和不规则波时,计算结果差异较大,原因在于软件建模的自由度有很大差别[20],这一点也说明在深海漂浮式风力机设计中,评价不同的设计工具需要有更为一致的标准。
2006年,挪威国家石油公司的Nielsen、Hanson和Skaare为配合HyWind项目,采用SIMO/RIFLEX/HAWC2耦合分析软件包对深海漂浮式风力机进行整机动力学研究,其中SIMO为水动力计算模块,RIFLEX为结构计算模块,HAWC2为风力机气动计算模块[21],后续研究证实以上软件包的计算结果与水池实际测量值基本吻合,有足够的可信性[22]。
2011年,挪威科技大学的Linde则利用SIMO软件参与IEA Wind Annex XXIII(国际能源署风能第23任务组)第二子任务组的海上风力机设计程序比较(OC3,Offshore Code Comparison Collaboratio)项目,研究了基准的5 MW Spar平台漂浮式风力机的水动力特性,并与水池实验值进行比较,发现两者有比较大的差别[23]。类似的,Solberg则利用HydroD/DeepC/TDHMILL3d组合程序参与OC3项目的研究,其中HydroD水动力计算模块,用于计算平台的水动力系数,提供给DeepC程序;TDHMILL3d为一动态链接库程序,主要将风力机的气动计算载荷传递给DeepC程序,DeepC为耦合平台和系泊系统的时域分析软件。研究显示:在160 m和320 m两种水深中,两种风力机平台的各自的水动力特性并无明显变化,但在给定的风况条件下,半潜式平台的纵摇和纵荡运动较大,而Spar平台则有剧烈的艏摇运动[24]。Karimirad 利用 SIMO(DeepC)/RIFLEX/HAWC2深入研究了两种系泊方式的Spar平台漂浮式风力机,研究结果表明:采用张力式系泊浮柱平台比悬链式系泊浮柱平台拥有更好的水动力性能,而且可以降低建造成本[25]。
2009年,德国斯图加特大学的Matha在NREL和国际能源署的资助下利用美国风能技术中心的AeroDyn/HydroDyn/FAST全耦合分析软件研究了麻省理工学院(MIT)/NREL张力腿式漂浮式风力机动力学特性,并与一般TLP、ITI驳船、Spar平台风力机和陆上风力机进行比较,证明MIT/NREL张力腿式漂浮式风力机是一种比较好的概念设计。同时,研究发现风力机控制策略对漂浮式平台结构的波浪响应有较大影响,高于额定风速的叶片变桨控制策略会引起较大的谐振响应,从而降低结构的疲劳寿命[26]。
3.2 漂浮式风力机在美国的研究
2001年,MIT的Sclavounos提出了两种不同的双弦腿浮体平台的漂浮式风力机设计方案[27],双弦腿浮体平台兼具张力腿和浮柱两种平台的特点,成为美国NREL后续研究的重点。
NREL则在2004年开始进行深海漂浮式风力机的可行性研究[28],并进行相应的工程技术风险评估研究[29],研究成果表明:漂浮式风力机的概念设计可依据其水动力特性将其划分为张力腿、浮柱、驳船平台模型以及三者的组合模型,并需要综合考虑,这为漂浮式风力机的理论建模和试验研究提供了新的研究思路。
MIT后来的一系列研究则集中于漂浮式风力机整机动力学分析模型的建立和相关全耦合设计软件的开发[30]。文献[31]首先提出了基于海洋水动力学和空气动力学的耦合算法计算深海构筑物动态响应,并计算出3种不同海况情况下平台6个自由度的响应振幅算子,与固定平台上安装的海上风力机比较,证明漂浮式风力机开发在技术上是完全可行的。文献[32]则使用MIT开发的swim motions lines(SML)水动力学软件对基于两种双弦腿浮体平台设计的1.5 MW风力发电机组的5种不同海况条件下的水动力学特性进行分析,特别给出了考虑风和波浪的双重扰动下平台的非线性水动力学特性。文献[33]考虑动力学与经济性两方面因素,分别对比了TLP平台设计和驳船平台的5 MW漂浮式风力发电机组,在3种不同海况情况下,对整个系统的年发电量进行了详细分析。文献[34]提出采用美国NWTC软件包结合商用MSC.ADMAS软件,建立风力机气弹—水动力全耦合仿真系统的思想,并探讨了相应的理论模型。文献[35]利用上述工具,对MIT/NREL浅水驳船和MIT/NREL TLP平台模型性能进行水动力学性能和经济性对比计算,但是没有考虑极端载荷条件的水动力学性;文献[36]进一步利用WAMIT水动力计算软件、NWTC的风力机气动-结构设计软件包和MSC.ADAM,建立并实现了建立气动—水动—伺服—弹性全耦合仿真系统的设想,并利用该系统研究随机风浪环境下漂浮式风力机的动态响应,研究发现由于NWTC.FAST软件采用模态分析方法,由于在叶片建模中才用到自由度较少制约了仿真结果。文献[37]利用上述气动—水动—伺服—弹性全耦合仿真系统计算了两种不同形式的深水驳船平台(ITI Energy Barge和MIT/NREL SDB),特别计算两种驳船的极端海况条件下的水动力载荷特性,并考虑变桨控制对水动力特性的影响。
与MIT研究不同,马萨诸塞大学安默斯特分校的Sebastian和Lackner采用自由尾迹理论作为耦合分析系统中的风力机的气动模型算法[38],开发了相应的算法模块wake induced dynamics simulator(WInDS),并与欧洲MEXICO风洞实验数据进行比较,在部分测试工况计算值与实验值相差仅在5%[39],并利用WInDS/FAST耦合求解ITI能源驳船、Hy-Wind Spar-Buoy平台NREL 5 MW风力机动力学性能;算例显示:该程序不但可以得到满意的结果,也可以得到非定常的风力机尾迹演化特性[40]。
2006年,美国Concept Marine Associates Inc.公司的Fulton等在延续海上石油天然气半潜式钻井平台设计思路给出的半潜式张力腿平台漂浮式风力机设计方案[41],美国加州海洋创新技术公司与美国航空环境公司的研究人员在2006年采用基于墨西哥湾暴风模型的傅立叶谱分析方法,分析可工作在2 300 m水深的平台(它是布置了3台风力机的三角形水泥混凝土TLP漂浮式平台)的动力响应[42],用Runge-Kutta方法计算了纵荡、横荡和垂荡响应以及纵摇、横摇和垂摇运动,得出在不同风浪荷载的系泊系统的锚链张力,对系泊系统设计有较大的参考价值。
3.3 漂浮式风力机在日本的研究
东京大学自2004年对三角形多风机半潜式海工平台水动特性进行了系统研究[43],并进行了水池实验[44]和数值计算[45],后又对单体漂浮平台水动特性进行了水池实验(见图4)[46],从经济性和可靠性角度看,后者优于前者。
为了更好地促进海上风力发电的国际合作,IEA于2005年成立了由DTU瑞索国家实验室(Risϕ)和NREL发起成立的风能第23任务组。目前由21个国家和两个国际组织组成,已经完成海上风力机设计软件计算结果对比[47],单桩[48]、四脚架[49]、漂浮式海上风力机[50]等计划中的前四阶段任务,目前已经进入新的OC4研究阶段。目前我国尚没有研究人员与机构参与其中,与国外差距日益增大。
国内对漂浮式风力机的研究则刚刚起步,主要集中于理论和水池实验研究。其中哈尔滨工业大学[51]、哈尔滨工程大学[52]和上海理工大学[53]为较早开展相关研究的学校,此外,大连理工大学[54]、重庆大学[55]、解放军工程大学[56]也有相关研究论文发表。
4 漂浮式风力机的水池与数值实验研究
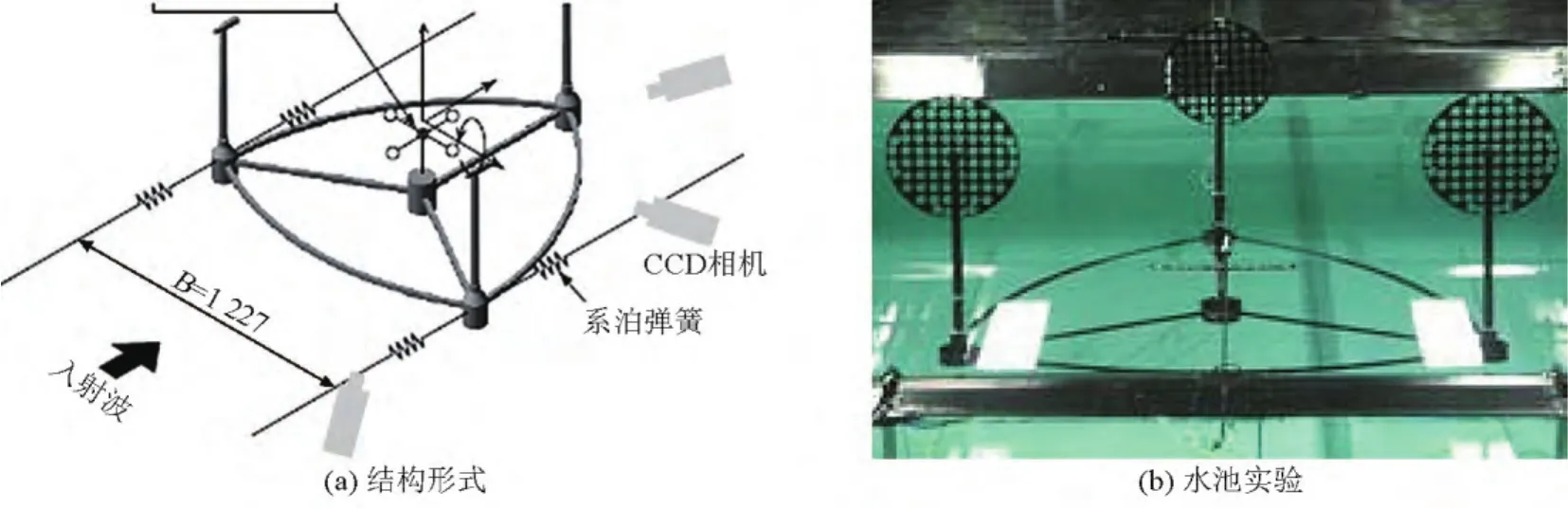
图4 三角形半潜式海洋平台研究(单位:mm)Fig.4 Research of Semi-submersible triangle offshore platform(unit:mm)
鉴于深海漂浮式风力机的运行海域的恶劣环境,其所受各种载荷非常复杂,为降低开发风险与成本,水池实验和基于多体动力学的整机仿真或数字样机技术都被广泛应用于深海漂浮式风力机的设计中。因此,深海漂浮式风力机的理论建模、软件仿真和水动力学实验,三者相互依赖,互为补充。
4.1 模型水池实验研究
作为最早商用漂浮式风力机项目,挪威国家石油公司的HyWind漂浮式风电机组自2009年9月起在挪威海岸附近的北海220 m水深环境中进行试运行[57]。在此项目预研阶段,采用水池实验与软件仿真方法系统地研究了漂浮式平台结构的水动力特性及对风浪组合荷载的响应(见图5a),该项目的软件仿真与水池实验相结合方法对后续研究有较大的借鉴意义。与之类似,前述美国加州海洋创新技术公司2009年开发了Windfloat平台,也参照上述流程,进行了相应的概念设计与选型计算[58]、水池实验(如图5b所示)和水动力计算[59]和整机结构动力学计算[60]。此外,德国Grossmann Ingenieur Consult GmbH公司的漂浮式风力机安装平台非常有特色,并在2012年3月在汉堡船模水池完成1∶20模型水池实验[61],这表明在未来,深海漂浮式风力机的海工平台将会独立成为一个行业。
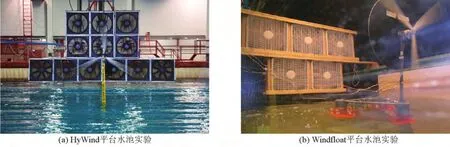
图5 漂浮式风力机的水动力学实验Fig.5 Hydrodynamic experiments of floating wind turbine
目前,已知的关于漂浮式风力机的水池实验,详见表1,模型比尺在1∶20到1∶150不等,估计随着开发的风力机的发电功率越来越大,未来的模型比尺将不得不超过1∶150,因为小模型水池实验仍会是未来漂浮式风力机水池实验一个重要挑战。
4.2 设计软件
现代风力机正日益呈现大型化和智能化趋势,这意味着原有的工程设计方法和经验控制手段将逐渐被现代风力机设计软件和控制软件替代。风力机设计软件作为体现设计思想、设计方法和设计工具的一种载体,已经在现代风力机行业处于核心位置,开发具有自主知识产权海上漂浮式风力机设计软件是进行该领域研究的基本条件之一。
现有的深海漂浮式风力机设计软件主要有德国劳氏船级社的GH.Bladed软件、美国NREL的NWTC.FAST软件与MSC.ADAMS组合、挪威海洋工程研究所的SIMO/RIFLEX软件与丹麦科技大学的HAWC/HAWC2或FLEX5组合、以及挪威船级社(DNV)的SESAM.DeepC软件、挪威生命科学大学的3Dfloat软件等,其他类似的设计软件或组合详见文献[63]。
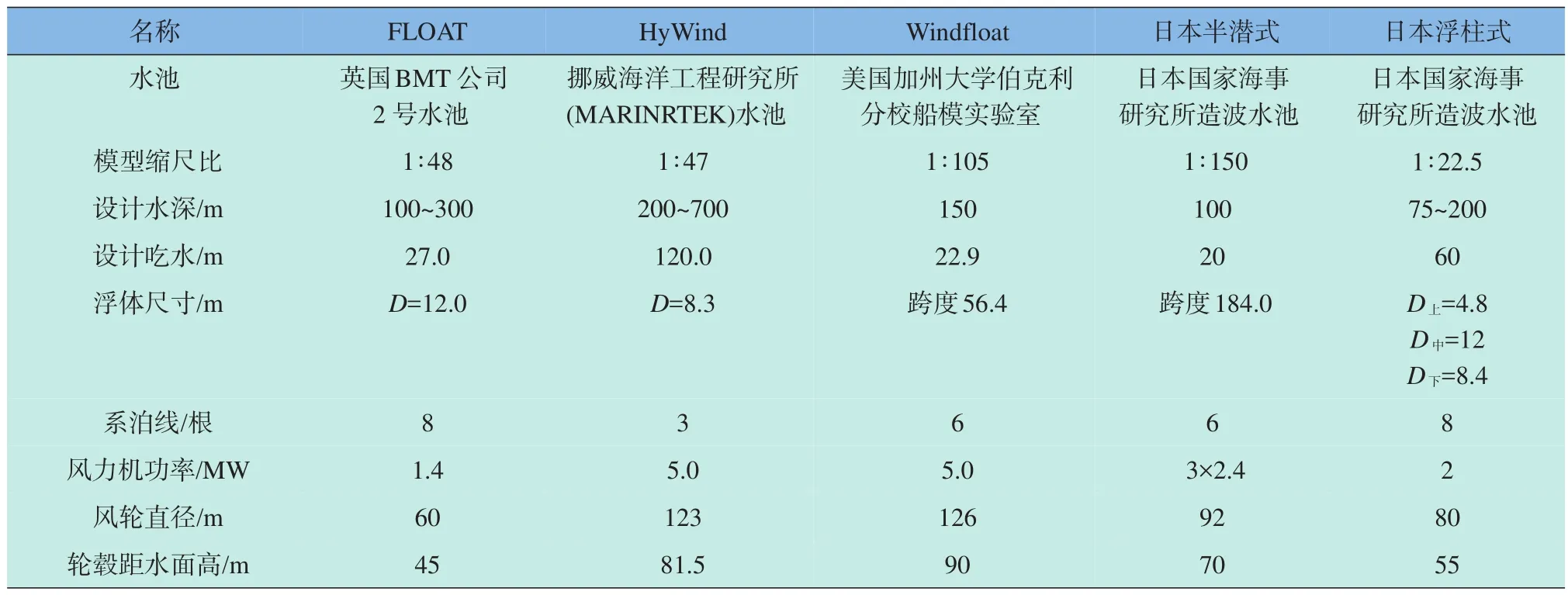
表1 漂浮式风力机模型试验技术参数[62]Table 1 Technical specifications of floating wind turbine hydrodynamic experiments[62]
虽然这些软件功能各不相同。但基本由4大功能模块组成,即气动模块、水动力模块、结构动力学模块和控制模块(如表2所示),其采用的算法多半相近,但由于对于深海漂浮式风力机整体动力学的耦合机理和解耦机制尚无深入全面的研究。以上所有开发设计软件或其组合基本都采用界面耦合方法,即分别在风力机气动—平台结构和平台结构—水动力学界面上设置约束条件,强行耦合,各系统独立计算,或者采用迭代计算方法,先算某种效应,然后再折合为附加质量或者附加载荷方法考虑计算其他一种效应,故而无法准确反映其耦合机制本质和影响。有必要开发更有效的全耦合算法和仿真模型用于深海漂浮式风力机的设计和认证。
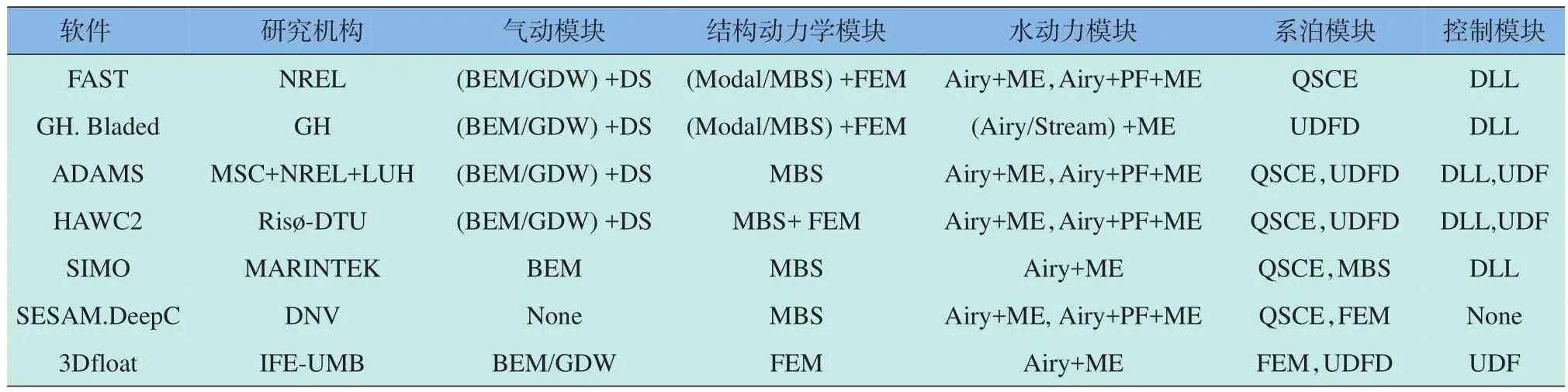
表2 海上风力机设计与仿真软件架构及模块[50]Table 2 Software architecture and module of offshore wind turbine design and simulation[50]
表2中,气动模块采用动量叶素理论和广义动态尾迹理论,部分软件考虑动态失速修正,但普遍缺乏反映长柔叶片和高塔架气动弹性的算法;水动力模块多采用线性波理论与Mrison方程相结合的方法,个别软件(GH.Bladed)进一步考虑了海流影响。部分来自船舶和海洋平台计算软件,则采用了波辐射和散射修正的线性势流理论结合Mrison方程的方法,但由于漂浮式风力机的上部结构的特殊性,该算法的有效性存疑;结构动力学模块中的风力机与漂浮式平台采用有限元方法(FEM)或者多体动力学方法,系泊系统采用准静态悬链线方程。风力机专用结构动力学软件(NWTC.FAST和GH.Bladed)则采用假设模态法与多体动力学相结合的技术,而船舶和海洋工程计算软件由于对系泊系统计算要求较高,则采用用户自定义力与位移关系方法计算系泊系统载荷,工作量大且难以掌握;控制模块基本都采用GH.Bladed格式的动态链接库(DLL)方法导入仿真模块,有些软件则提供用户自定义格式(UDF)的控制文件。
4.3 数值实验
漂浮式风力机是复杂的气动—弹性—波浪—海流—系泊相互作用(气动—弹性—水动力学相互耦合)的多柔体系统[64]。在流体自由表面上,该系统在自身浮力、重力及系泊力作用下处于平衡状态,系统的各种扰动(风—波—流)都具有非定常、强非线性的特点。物理上属具有自由表面流体与柔性体的耦合问题。其机理相当复杂:柔性体(弹性体)的变形运动作为边界条件导致其周围流场的改变,同时流场作用在柔性体表面的压力分布又影响其变形运动,二者同时作用,难以分离。又因柔性体抗弯刚度较小,与流体作用过程中易产生大位移变形。因此,必须求解变形运动的高阶偏微分控制方程。流体和柔性体边界的相互耦合作用使得求解结构动力学方程时必须考虑流场压力的改变,同理求解周围流场时也不能忽略弹性体边界的影响。若考虑流场的非定常特性,则问题会更加复杂。因此,对于该类问题,必须同时求解流场和结构动力学控制方程,或者采用有效的解耦算法。
虽然流固耦合问题的数值算法比较成熟,如差分方法(风力机气动计算时常用)、边界元算法(水动力学计算常用)和FEM(整机结构动力学计算常用)等,但是由于现代风力机尺度上特别巨大(5 MW风力机叶轮直径超过120 m,塔架接近90 m),在空间域上离散需要大量网格,大型机以下计算工具无法满足其计算需要,所以相关漂浮式风力机的整机计算流体力学/计算结构力学耦合计算还未见相关研究;此外,由于流体控制方程对流项的存在及保证流固耦合计算的稳定性和计算精度要求采用较小时间步长,计算非常耗时;最后,在整个产品开发过程中,需要反复对产品深化设计或者改型计算,数值算法显然无法满足以上要求。
5 结语
综上所述,鉴于深海风能开发的急迫需要,对于漂浮式风力机的研究需求日益迫切,但是现有的研究明显存在以下不足。
1)目前深海漂浮式风力机的很多概念设计基本上都属于延续海洋石油工业领域以往经验的做法,即将风力机安装在海洋石油平台上。由于海洋石油平台的体积相对于漂浮式风力机而言比较庞大,直接采用该平台会增加建设成本;另外深海漂浮式风力机气动载荷要远高于海洋平台,但是水动力载荷则小于后者。因此,机械的采用原有的海洋石油平台的水动力计算方法,无法真实反映深海漂浮式风力机的动力学特性。
2)但相对于陆上风力机和浅海风力机,目前尚无深海漂浮式风力机(欧洲以50 m,美国则以60 m划分)的设计方法和认证标准,如国际电工委员会(IEC)海上风力机发电机组设计要求(IEC 61400-3—2009),德国劳氏船级社海上风力机认证准则(GL Rules and Guidelines IV2,2007),DNV海上风力机结构设计标准(DNV-OS-J101—2007)和德国联邦海事与水运署(BSH)海上风力机设计准则(BSH 7005—2007)和海上风电场勘察准则(BSH 7004—2008)主要是针对近岸或浅海风力机。
3)尽管我国早在20世纪90年代就开始进行相关风力机设计软件的开发,如中国空气动力研究与发展中心开发的风力机设计软件包和汕头大学开发的风力机全系统载荷分析及优化设计软件包及后续系列模块,但是从整体上看,从软件功能、易用性和版本更新等都略逊于国外同类软件。一定程度上造成了目前我国风力机设计和制造领域都严重依赖于国外相关公司,须予以足够的重视。
[1]高 坤,李 春,高 伟.新型海上风力发电及其关键技术研究[J].能源研究与信息,2010(2):110-116,105.
[2]Heronemus W E.Pollution-free energy from offshore winds[C]//Proceedings of The 8th Annual Conference and Exposition Marine Technology Society.USA:Washington DC,1972.
[3]鲍亦和.漂浮式海上风电场[J].上海电力,2007(2):58-60.
[4]Satchwell C J.Moored floating platforms for wind-turbines[C]//Royal Aeronautical Society Conference:Offshore wind power mega-projects,1988.
[5]Tong K C,Quarton D C,Standing R.Float-a floating offshore wind turbine system in wind energy conversion[C]//Proceeding of the BWEAWind Energy Conference.England:York,1993.
[6]Tong K C.Technical and economic aspects of a floating offshore wind farm[J].Journal of Wind Engineering and Industrial Aerodynamics,1998(4):399-410.
[7]Barltrop N.Multiple floating offshore wind farm(MUFOW)[J].Wind Engineering,1993,17(4):183-188.
[8]Bertacchi P,Di Monaco A,Gerloni M,et al.Eolomar-a moored platform for wind turbines[J].Wind Engineering,1994,18(4):189-191.
[9]高 伟,李 春,刘 全.深海漂浮式风力机的概念设计与气动—水动力耦合特性评述[J].能源研究与信息,2011,27(3):168-173.
[10]Halfpenny A.Dynamic analysis of both on-and off-shore windturbines in the frequency domain[D].London:University College London,1998.
[11]Henderson A R.Analysis tools for large floating offshore wind farms[D].London:University College London,2000.
[12]Vijfhuizen W J M J.Design of a wind and wave power barge[D].UK:Glasgow Universities of Glasgow and Strathclyde,2006.
[13]Bulder B H,Van Hees M Th,Henderson A R,et al.Study of the feasibility and boundary conditions of floating offshore wind turbines[R].TNO Report 2002-CMC-R043,Netherlands,2002.
[14]Blue H.Website for the Blue-H floating wind turbine prototype in Brindisi harbor[EB/OL].[2012—6—20].http://www.bluehgroup.com.
[15]Henderson A R,Patel M H.On the modeling of a floating offshore wind turbine[J].Wind Energy,2003,6(1):53-86.
[16]Chen Zhenzhe.Deepwater floater for wind turbines[D].Kongens Lyngby:Technical University of Denmark,2005.
[17]Chen Zhenzhe,Tarp-Johansen N J,Jensen J J.Mechanical characteristics of some deepwater floater designs for offshore wind turbines[J].Wind Engineering,2006,30(5):417-430.
[18]Psichogios N.Design of a hydro-aeroelastic model scale TLP wind turbine[D].Kongens Lyngby:Technical University of Denmark,2011.
[19]Ramachandran G,Bredmose H,Sørensen J,et al.Fully coupled three dimensional dynamic response of a TLP floating wind turbine in waves and wind[C]//Proceedings of the OMAE 2012.Brazil:Rio De Janeiro,2012.
[20]Akin D.Response of an off shore wind turbine to simultaneous wind and wave loads[D].Kongens Lyngby:Technical University of Denmark,2011.
[21]Nielsen F G,Hanson T D,Skaare B.Integrated dynamic analysis of floating offshore wind turbines[C]//Proceedings of the OMAE 2006.Germany:Hamburg,2006.
[22]Skaare B,Hanson T D,Nielsen F G.Integrated dynamic analysis of floating offshore wind turbines[C]//Proceedings of the OMAE 2007.USA:San Diego,2007.
[23]Linde B.Motion of floating wind turbines[D].Trondheim:Norwegian University of Science and Technology,2010.
[24]Solberg T.Dynamic response analysis of a spar type floating wind turbine[D].Trondheim:Norwegian University of Science and Technology,2010.
[25]Karimirad M.Stochastic dynamic response analysis of spar-type wind turbines with catenary or taut mooring systems[D].Trondheim:Norwegian University of Science and Technology,2011.
[26]Matha D.model development and loads analysis of an offshore wind turbine on a tension leg platform,with a comparison to other floating turbine concepts[R].NREL/TP-500-45891.USA:Golden,2009.
[27]Kim S,Sclavounos P D.Fully Coupled response simulations of theme offshore structures in water depths of up to 10,000 Feet.[C]//Proceedings of 11th ISOPE.Norway:Stavanger,2001.
[28]Musial W,Butterfield S,Boone A.Feasibility of floating platform systems for wind turbines[R].NREL/CP-500-34874.Golden,CO,USA,2004.
[29]Butterfield S,Musial W,Jonkman J M,et al.Engineering challenges for floating offshore wind turbines[C]//Proc.of Copenhagen Offshore Wind 2005 Conference and Expedition Proceedings.Denmark:Copenhagen,2005.
[30]MIT.Low Wind speed technology phase II:offshore floating wind turbine concepts:fully coupled dynamic response simulations[R].DOE/GO-102006-2206,NTIS.USA:Springfield,2006.
[31]Withee J E.Fully coupled dynamic analysis of a floating wind turbine system[D].Cambridge:Massachusetts Institute of Technology,2002.
[32]Lee K H.Responses of floating wind turbines to wind and wave excitation[D].USA:Massachusetts Institute of Technology,2004.
[33]Wayman E N.Coupled dynamics and economic analysis of floating wind turbine systems[D].USA:Massachusetts Institute of Technology,2004.
[34]Jonkman J M,Sclavounos P D.Development of fully coupled aeroelastic and hydrodynamic models for offshore wind turbines[C]//2006 ASME Wind Energy Symposium Reno.USA:Golden,2006.
[35]Wayman E N,Sclavounos P D,Butterfield S,et al.Coupled dynamic modeling of floating wind turbine systems[C]//Offshore Techndogy Conference Houston.USA:Golden,2006.
[36]Jonkman J M,Buhl M L Jr.Development and verification of a fully coupled simulator for offshore wind turbines[C]//45th AIAA Aerospace Sciences Meeting and Exhibit,Wind Energy Symposium.USA:Golden,2007.
[37]Jonkman J M.Dynamics modeling and loads analysis of an offshore floating wind turbine[R].NREL/TP-500-41958.USA:Golden,2007.
[38]Sebastian T,Lackner M.A comparison of first-order aerodynamic analysis methods for floating wind turbines[C]//Proceedings of 48th AIAA Aerospace Sciences Meeting.USA:Orlando,2010.
[39]Sebastian T,Lackner M.Development of a free vortex wake method code for offshore floating wind[J].Renewable Energy,2012(46):269-275.
[40]Sebastian T,Lackner M.Analysis of the induction and wake evolution of an offshore floating wind turbine[J].Energies,2012(5):968-1000.
[41]Concept Marine Associates.Wind speed technology phase II:semi-submersible platform and anchor foundation systems for wind turbine support[R].DOE/GO-102006-2198.USA:NTIS,Springfield,2006.
[42]Zambrano T,MacCready T,Kiceniuk T Jr,et al.Dynamic modeling of deepwater offshore wind turbine structures in Gulf of Mexico storm conditions[C]//Proceedings of the 25th OMAE:2006-92029.Germany:Hamburg,2006.
[43]Ishihara T.Challenges and future prospects in the development of wind power in Japan[J].Civil Power,2004,314:3-9.
[44]Ishihara T,Phuc P V,Sukegawa H,et al.A study on the dynamic response of a semisubmersible floating offshore wind turbine system part 1:water tank test with considering the effect of wind load[C]//Australia:Proceedings of 12th ICWE,2007.
[45]Phuc P V,Ishihara T.A study on the dynamic response of a semi-submersible floating offshore wind turbine system part 2:Numerical simulation[C]//Australia:Proceedings of 12th ICWE,2007.
[46]Ishihara T,Waris M B,Sukekawa H.A studay on influence of heave plate on dynamic response of floating offshore wind turbine system[C]//Japan:Proceedings of the 3rd EOW,2009.
[47]Passon P,KÜhn M,Butterfield S,et al.OC3—benchmark exercise of aero-elastic offshore wind turbine codes[C]//Journal of Physics(Conference Series):The 2nd Conference on The Science of Making Torque From Wind.Denmark:Copenhagen,2007.
[48]Jonkman J M,Butterfield S,Passon P,et al.Offshore code comparison collaboration within IEA wind annex XXIII:phase II results regarding monopile foundation modeling[C]//Pro-ceedings of EOWC(the IEA European Offshore Wind Conference).Germany:Berlin,2007.
[49]Nichols J,Camp T,Jonkman J M,et al.Offshore code comparison collaboration within IEA wind annex XXIII:phase III results regarding tripod support structure modeling[C]//Proceedings of 47th AIAA Aerospace Sciences Meeting Including The New Horizons Forum and Aerospace Exhibition.USA:Orlando,2008.
[50]Jonkman J M,Larsen T,Hansen A,et al.Offshore code comparison collaboration within IEA wind task 23:phase IV results regarding floating wind turbine modeling[C]//EWEC 2010.Warsaw,Polang,2010.
[51]任年鑫.海上风力机气动特性及新型浮式系统[D].哈尔滨:哈尔滨工业大学,2011.
[52]黄 俊.海上浮式风力发电机组载荷及结构性能研究[D].哈尔滨:哈尔滨工业大学,2010.
[53]高 坤.海上漂浮式风力机的概念设计与仿真研究[D].上海:上海理工大学,2010.
[54]Ren Nianxin,Li Yugang,Ou Jinping.The effect of additional mooring chains on the motion performance of a floating wind turbine with a tension leg platform[J].Energies,2012(5):1135-1149.
[55]王 磊.海上风电机组系统动力学建模及仿真分析研究[D].重庆:重庆大学,2011.
[56]段金辉,李 峰,王景全,等.漂浮式风电场的基础形式和发展趋势[J].中国工程科学,2010,12(11):66-70.
[57]Oslo.Hywind Floating Turbine Installled[EB/OL].[2009—06—20].http://www.renewableenergy world.com/rea/news/article/2009/06/hywind-moved-into-position#.
[58]Roddier D G,Cermelli C A,Weinstein A.Windfloat:a floating foundation for offshore wind turbines Part I:Design basis and qualification process[C]//Proceedings of the 29th OMAE:2009-79229.USA:Honolulu,2009.
[59]Cermelli C A,Roddier D G,Aubault A.Windfloat:a floating foundation for offshore wind turbines.part II:hydrodynamics[C]//Proceedings of the 29th OMAE:2009-79231.USA:Honolulu,2009.
[60]Aubault A,Cermelli C A,Roddier D G.Windfloat:a floating foundation for offshore wind turbines.part III:structural analysis[C]//Proceedings of the 29th OMAE:2009-79232.USA:Honolulu,2009.
[61]GICON GmbH.GICON successfully tests floating foundation foroffshorewind [EB/OL].[2012—06—20]www.gicon.de_en_geschaeftsberei che_gte_sof.html.
[62]赵 静,张 亮,叶小嵘,等.模型试验技术在海上浮式风电开发中的应用[J].中国电力,2011,44(9):55-60.
[63]Cordle A,Jonkman J.State of the art in floating wind turbine design tools[R].NREL/TP-500-50543.USA:Golden,2011.
[64]Matha D,Schlipf M,Cordle A,et al.Challenges in simulation of aerodynamics,hydrodynamics,and mooring-line dynamics of floating offshore wind turbines[R].NREL/TP-500-50544.USA:Golden,2011.
The current situation and latest research of deep-sea floating wind turbine
Gao Wei1,2,Li Chun1,Ye Zhou1
(1.School of Energy and Power Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China;2.Technology Research Institute,China Datang Group Creative Wind Energy Co.,Ltd.,Qingdao,Shandong 266000,China)
Offshore wind farm is the latest direction of the wind power technology,with the further development of offshore wind farms technology,it is inevitable that future trend of offshore wind farms from offshore to deep sea.With increasing of sea-water depth,the cost of wind farm construction increased.The technology of floating wind turbine is an effective way to solve this problem.This paper systematically describes that early history,current situation and latest research of deep-sea floating wind turbine in the foreign academics,focuses on its theoretical analysis,simulation and hydrodynamic experimental,further refers to the shortcomings of that studies,accordingly propose some new research directions and ideas.
deep sea;floating wind turbine;system simulation;hydrodynamic experiments
TK83
A
1009-1742(2014)02-0079-09
2012-09-18
国家自然科学基金项目(E51176129);教育部高等学校博士学科点专项科研基金(博导类)(20123120110008);国家科技支撑计划(2012BAA01B01);上海市教委科研创新(重点)项目(13ZZ120)
高 伟,1978年出生,男,山东乳山市人,博士,主要从事海上风力机研究;E-mail:gawain_gao@hotmail.com
猜你喜欢
空气动力学学报(2022年4期)2022-08-23 06:51:26
少儿科学周刊·少年版(2022年19期)2022-05-30 10:48:04
小哥白尼(趣味科学)(2019年7期)2019-11-16 09:04:14
测控技术(2018年5期)2018-12-09 09:04:38
学苑创造·A版(2017年4期)2017-05-13 22:56:42
浙江大学学报(工学版)(2015年2期)2015-05-30 07:04:53
振动工程学报(2015年1期)2015-03-01 01:15:46
太阳能(2015年6期)2015-02-28 17:09:35
数学大王·低年级(2014年6期)2014-08-02 04:45:28
火炸药学报(2014年1期)2014-03-20 13:17:22