图像配准算法及其在航空发动机温度场检测中的应用研究
2014-09-22 05:35:34于坤林
长沙航空职业技术学院学报 2014年2期
于坤林
(长沙航空职业技术学院,湖南 长沙 410124)
图像融合[1]是指对多个图像传感器获得的互补或冗余信息进行集合的过程。图像融合具有工作范围大、性价比高、可靠性高等优点[2],因此图像融合技术得到了广泛应用。目前,国内对航空发动机温度场检测的方法主要有三种:热电偶直接测量法和示温漆彩色图像人工识别法以及示温漆彩色图像处理识别法[3]。这三种方法都具有可靠性低、测量范围小及测量精度低等缺点,而图像融合具有上述优点,因此本文首次提出将图像融合技术应用于航空发动机热端部件的温度场检测中。而图像配准技术则是图像融合的关键技术,图像配准是指同一目标的两幅图像或多幅图像在空间位置上的对准过程,图像配准的最终目标就是要找到把一幅图像中的点映射到另一幅图像中对应的点的最佳变换。图像配准的方法主要有三种:基于灰度信息的方法、基于变换域的方法和基于图像特征的方法。
1 基于灰度信息的图像配准方法
基于灰度信息的图像配准方法是利用图像本身具有灰度的一些统计信息来度量图像的相似程度。常见的基于灰度的配准方法可分为相关法、系列相关法、互信息法三类。
互信息法[4]是一种较新的解决图像配准问题的方法,互信息图像配准的关键思想是:如果两幅图像达到匹配,他们的互信息达到最大值。互信息I定义为


这里H(a),H(b)分别是个体熵,H(a,b)是联合熵,基于互信息法的图像配准实验如图1所示。比较图1(a)和图1(c)可知,图像的配准精度比较高,但计算量大,运行时间长,该算法在 Pentium(R)dual core CPU 2.7GHZ,内存2G的PC机上采用MATLAB R2011a软件平台运行时间为1分26秒。
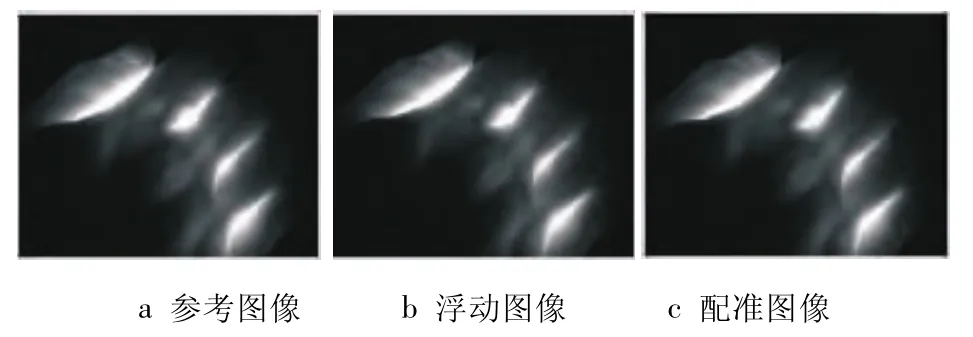
图1 基于互信息法的图像配准结果图
该方法优点是算法简单,精度和稳定度高,缺点是计算量大且对噪声敏感。
2 基于变换域的图像配准方法
基于变换域的图像配准方法主要是傅立叶变换方法[4],该方法的优点:一是能处理图像的平移、旋转和尺度等变换;二是可以抑制噪声,有很好的鲁棒性。根据傅立叶变换的平移特性,设f1(x,y)和f2(x,y)是两幅图像,(x0,y0)是两幅图像之间的平移量,则有

设 f1,f2对应的傅立叶变换分别是 F1,F2,则有

定义两幅图像的互功率谱为

式中F*(u,v)是F(u,v)的共扼复函数。
如果两幅图像 f1(x,y)和 f2(x,y)之间有平移、旋转和尺度变换,设平移量为(x0,y0),旋转角度为θ,尺度变换为r,则有

其傅立叶变换为

为了方便计算,两幅图像的互功率谱可用极坐标形式表示为

通过相位相关技术可以求得r和θ,然后根据r和θ对原图像进行缩放和旋转,再相位相关技术可以求得平移量。基于傅立叶变换的图像配准实验如图2所示。

图2 基于傅立叶变换的图像配准结果图
该方法缺点是对灰度变换敏感,计算复杂度高。
3 基于特征的图像配准方法
基于特征的图像配准方法基本步骤[5]是:(1)特征提取,根据图像性质提取适用于图像配准的几何或灰度特征。(2)特征匹配,将两幅待配准图像中提取的特征对应起来,删掉没有对应的特征。(3)图像转换,根据特征匹配对的性质确定坐标变换参数,根据坐标变换参数把图像配准到同一坐标系中。该方法的优点是计算量小,速度快,且对图像的灰度变化具有鲁棒性。所以这种方法目前比较常用。
点特征是基于特征的图像配准方法所用到的主要特征,因为角点既是图像上的特殊位置又是点的特征,因此角点成为基于特征的图像配准方法最常用的特征。基于角点特征的图像配准方法主要有Harris、SUSAN、SIFT这3种算法。
Harris算法分为4步:(1)角点提取。(2)角点匹配。(3)变换参数估计。(4)重采样。基于Har-ris角点特征的图像配准算法如图3所示。
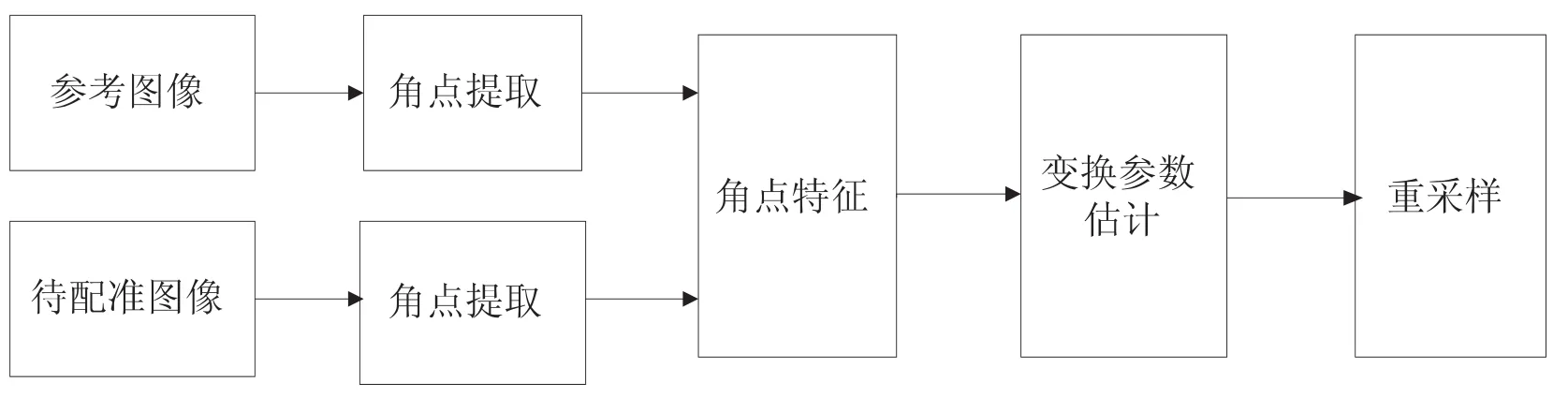
图3 基于Harris角点特征的图像配准算法框图
基于Harris角点特征的图像角点提取实验如图4所示。从图4(b)可以看出该算法能够提到大量的角点,但是存在角点错检和漏检的问题,这会造成错配,从而降低了配准精度。

图4 Harris算法的角点提取结果图
Harris算子[5]是利用图像的梯度信息来提取特征点,Harris算子具有计算机量大,定位精度低,对旋转和噪声敏感等缺点,所以实际单独使用不多。
SUSAN算子是通过计算与模板核像素值相似的特性来寻找特征点,通过SUSAN模板在图像上滑动,比较模板内每个像素与模板核的灰度值

基于SUSAN算法角点特征的图像角点提取实验如图5所示。从图5(b)可以看出该算法检测到的角点比较精确,配准精度比较高。
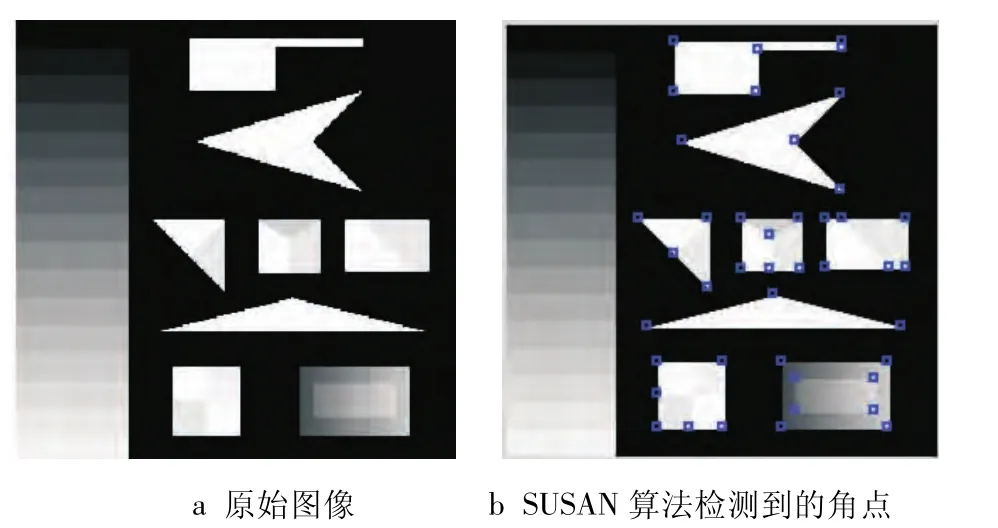
图5 SUSAN算法的角点提取结果图
SUSAN算子优点是具有很强的抗噪性,且定位精度高,缺点是算法复杂度比较大。
SIFT算子首先用DOG算子提取特征点,然后用128维信息扫描每一个特征点。SIFT算法分为4步:(1)构建尺度空间。通过高斯核对原始图像进行尺度变换,得到多尺度空间表示系列,然后对这些系列在尺度空间内提取特征。(2)对特征点的位置进行定位。通过对局部极值点进行二次函数拟合来定位特征点的位置和尺度。(3)确定特征点的主方向。(4)生成SIFT特征向量。
基于SIFT算子的图像配准[6]实验如图6所示。从图6(c)可以看出,采用SIFT图像匹配方法得到28对匹配点对,正确匹配点对较多,配准结果比较满意。

图6 基于SIFT算法的图像配准结果图
SIFT算子优点是稳定性好,抗噪性高,缺点是算法复杂度比较大,效率低。
4 应用
好的图像配准算法要求:图像匹配点丰富、准确配准率高、无重复且适时性好。而SIFT算子具有以下优点:1.对亮度、尺度缩放、旋转具有不变特性,对光照的变化和图像变形具有较强的适应性;2.对视角变换、噪声和仿射变换具有很好的鲁棒性;3.特征信息丰富、独特性好,能够实现快速准确的匹配,算法稳定;4.具有多量的特性,即使少数的几个物体也可以产生大量的特征向量;5.具有高速的特性,该算法可以达到实时的要求;6.具有可扩展的特性,能够与其他特征向量进行联合。因此该算法检测效果是最好的。
由于航空发动机工作时振动强、噪声大,工作环境比较恶劣,而SIFT图像配准方法则具有稳定性好,抗噪性高,配准精度较高等优点,因此在进行航空发动机温度场彩色图像融合前选用基于SIFT算子的图像配准方法对图像进行配准。基于SIFT算法的航空发动机温度场示温漆彩色图像配准实验如图7所示。

图7 基于SIFT算法的航空发动机温度场示温漆彩色图像配准结果图
由图7(c)可以看出,图像的正确匹配点对是非常多的,配准精度较高。
5 结论
基于SIFT算法的图像配准方法具有稳定性好,抗噪性高等优点,适合于工作环境恶劣的航空发动机温度场示温漆彩色图像配准,实验结果表明:该算法用于航空发动机温度场检测中,取得较好地图像配准效果。
[1]那彦,焦李成.基于多分辨分析理论的图像融合方法[M].西安:西安电子科技大学出版社,2007.
[2]敬忠良,肖刚,李振华.图像融合——理论与应用[M].北京:高等教育出版社,2007.
[3]马春武.示温漆温度自动判读和数字图像处理系统[J].航空发动机,2007,(2).
[4]陈显毅,周开利.医学图像配准常用方法与分类[J].信息技术,2008,(7).
[5]苏清贺,程红,孙文邦.遥感图像配准方法研究——综述[J].红外,2010,(10).
[6]刘小军,杨杰,孙坚伟,等.基于SIFT的图像配准方法[J].红外与激光工程,2008,(1).
猜你喜欢
童话世界(2020年8期)2020-12-18 20:12:41
学生天地(2020年4期)2020-08-25 09:07:58
学生天地(2020年7期)2020-08-25 09:00:54
电子技术与软件工程(2018年10期)2018-07-16 12:04:18
电子科技(2016年12期)2016-12-26 02:25:49
系统工程与电子技术(2016年4期)2016-08-24 07:46:28
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27 06:31:53
西北工业大学学报(2015年4期)2016-01-19 03:31:47
电测与仪表(2015年9期)2015-04-09 11:59:22
弹箭与制导学报(2015年1期)2015-03-11 15:32:31