
偏振光栅导航传感器电子系统设计*
2014-09-20 07:55赵开春
传感器与微系统 2014年1期
马 强, 赵开春, 尤 政
(清华大学 精密仪器系,北京100084)
0 引 言
天空偏振光分布模式和生物偏振光导航机理的研究为仿生偏振光导航技术奠定了基础。沙蚁等昆虫的复眼具有特殊结构和神经[1],能够敏感关于太阳子午线对称的天空偏振光分布模式[2,3],可精确地识别体轴相对太阳子午线的航向角。仿生偏振光导航传感器模仿昆虫复眼偏振敏感结构,利用天空偏振光自主导航定向,它不需要太阳可视,可适应不同天气,弥补了其他导航传感系统的性能局限。国内外研究者已经研制出偏振光导航传感器样机,并在具体工程应用上开展试验研究。2000年,Lambrinos D等人研制基于光电二极管检偏原理的传感器样机,并在移动机器人上验证了仿生偏振光导航可行性[4],此后国内研究者研制了类似的传感器样机,如,合肥工业大学的高隽等研制出四通道偏振检测传感器[5],大连理工大学的褚金奎等研制出六通道偏振光传感器[6]。2010年,Chahl J等人在NASA和DARPA项目支持下进行无人机飞行试验,也采用天空偏振光罗盘导航[7]。然而此类样机至多有3组敏感器,空间分辨率较低,较依赖局部天空偏振光分布模式,使得输出结果易受天气变化干扰,经过误差补偿后输出精度最优可达±0.2°。
偏振光栅阵列和图像传感器组成偏振感光器阵列[8],以多通道冗余方式处理全天域偏振信息,增大了空间分辨率,提高了系统的定向精度,更加类似昆虫复眼偏振敏感结构。偏振感光器阵列和图像处理硬件平台的结合是偏振光导航传感器的新思路和新结构,可称之偏振光栅导航传感器。研制集成度更高、精度更高的偏振光栅导航传感器具有迫切需求,可将仿生偏振光导航技术推向更高的层次。
本文阐述了偏振光栅导航传感器的工作原理,从工程实现角度设计其电子系统,讨论了软硬件的协同设计和实现方法,最后验证了系统功能和计算精度。
1 工作原理
瑞利散射理论模型如图1(a)所示,观察点P的光束偏振方向垂直于P点与太阳S、观察点O构成的平面。当散射角∠POS=±90°时,偏振度达到最大值。实际测量结果显示,晴空时全天域偏振光分布模式与上述理论模型非常吻合[2,3],此模式关于太阳子午线对称,且此对称性不随太阳位置变化而改变,具有相对稳定的特点。昆虫复眼中偏振敏感结构和偏振对立神经元对0°,60°,130° 3个特定角度更加敏感[9],据此感知体轴相对太阳子午线的夹角来确定方向,此为偏振光导航的仿生基础。
偏振感光器阵列由偏振像元组成,如图1(b)。偏振像元包含4个偏振像素,其中,3个有效偏振像素的偏振方向分别为0°,60°,120°,这个结构模仿昆虫偏振神经元对特定方向角敏感。
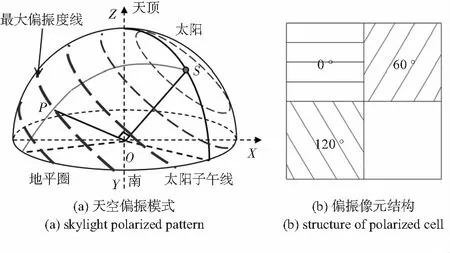
图1 仿生偏振光导航原理
光波在介质中传播并与介质相互作用,表征其偏振状态的斯托克斯(Stokes)矢量将发生变化。Stokes矢量包含4个量纲相同的参量I,Q,U和V
S=[I,Q,U,V]T.
(1)
其中,I为偏振光强度。V为偏振分量,一般很小,在仪器的可检范围内可以忽略,所以,只求取前3个参量。
米勒(Mueller)矩阵表示器件的特性与取向。直线偏振器透光轴与参考轴夹角为θ,则其Mueller矩阵Mθ为[10]
(2)
出射光Stokes矢量Sin与入射光Stokes矢量Sout的关系可用矩阵乘积表示
Sout=[I(θ),Q(θ),U(θ)]=Mθ·Sin.
(3)
化简整理得到出射光的光强I(θ)为θ和入射光偏振态I,Q,U的函数[11]
(4)
将偏振方向0°,60°,120°分别代入式(4)得到联立方程组式(5),由此入射光的偏振态Stokes矢量的参量I,Q,U解得
(5)
Stokes矢量表示偏振度P可以用式(6)计算,而偏振方位角φ代入式(5)的I,Q和U计算如式(7)所示
(6)
(7)
电子系统即是按照式(7)用0°,60°和120° 3个角度的光强计算出偏振方位角图像,利用图像对称性检测算法从偏振方位角图像中提取出太阳子午线相对本体参考方向的夹角,即相对航向角。
2 电子系统设计
偏振光栅导航传感器包含了两大部分:偏振光检测成像和本文研究的电路处理部分。偏振光检测成像部分作为前级,含有光学镜头、蓝紫光滤光片、微型偏振阵列和图像传感器,它们将作为一个类似数字相机的整体部件,对后级提供图像和时钟输出,以及有关控制命令输入的接口。
电子系统的功能结构如图2所示,FPGA芯片上构建SOPC和其他硬件电路模块,形成偏振光栅导航传感器电子系统的功能主体。配置芯片EPCS FLASH上存储FPGA配置文件和NIOS程序映像,使系统上电时自动配置运行程序。信号转换模块和RS—232电平转换器实现前级和后级的通信。
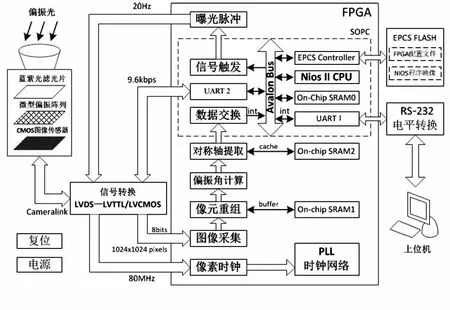
图2 电子系统功能结构框图
前级检偏成像部分提供80 MHz的像素时钟,与FPGA内部PLL时钟网络相连,作为全系统基本时钟。
信号触发模块使能曝光脉冲,作用于前级检偏成像部分,输出的图像经过采集后重组偏振像元,然后计算偏振方位角图像,提取对称特征得到相对航向角,经过数据交换和UART1模块发送至上位机。UART1和UART2转发上位机发出的设置检偏成像部分参数。SOPC内,各个模块之间通过Avalon总线连接。主处理器Nios II CPU、程序和数据存储器On-Chip SRAM0与程序配置模块EPCS Controller构成了最小系统。
3 电子系统实现
3.1 信号转换模块
信号转换模块采用Cameralink标准协议将接至SDR—26接插件的11对低压差分信号(low voltage differential signal,LVDS),通过DS90CR288A,DS90LV047A和DS90LV019 3个芯片与LVTTL,LVCMOS信号相互转换[11],实现了图像数据、像素时钟、相机控制和串行通信的传输。转换后的信号包括帧有效FVAL、行有效LVAL、数据有效DVAL;外触发曝光信号EXSYNC;双工异步串行信号SerTC和SerTFG。LVDS差分线对的终端接入100 Ω匹配电阻器,减少终端信号反射。信号转换模块设计如图3所示。
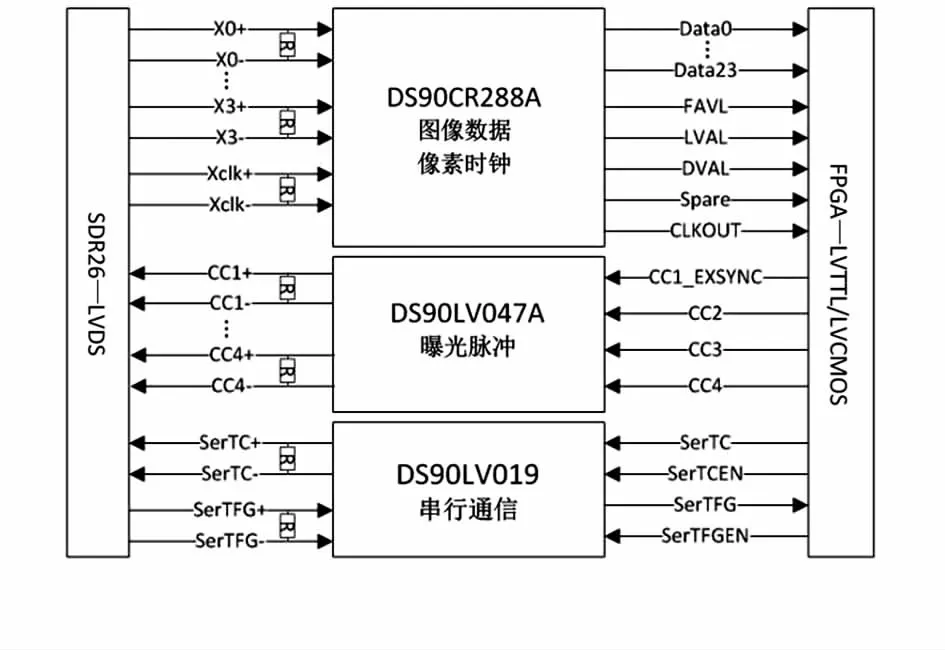
图3 Cameralink信号转换模块
3.2 FPGA硬件模块
FPGA中实现的硬件模块包括曝光脉冲、图像采集、像元重组、偏振角计算和对称轴提取。
20 Hz的外触发曝光信号EXSYNC经过使能,其下降沿触发检偏成像部分内部产生同频的Internally-generated EXSYNC信号,该信号上升沿相对EXSYNC信号下降沿延迟100 μs,其高电平时长决定了曝光时间,可由上位机指令设置,并且从该信号的下降沿开始输出图像,如图4所示。
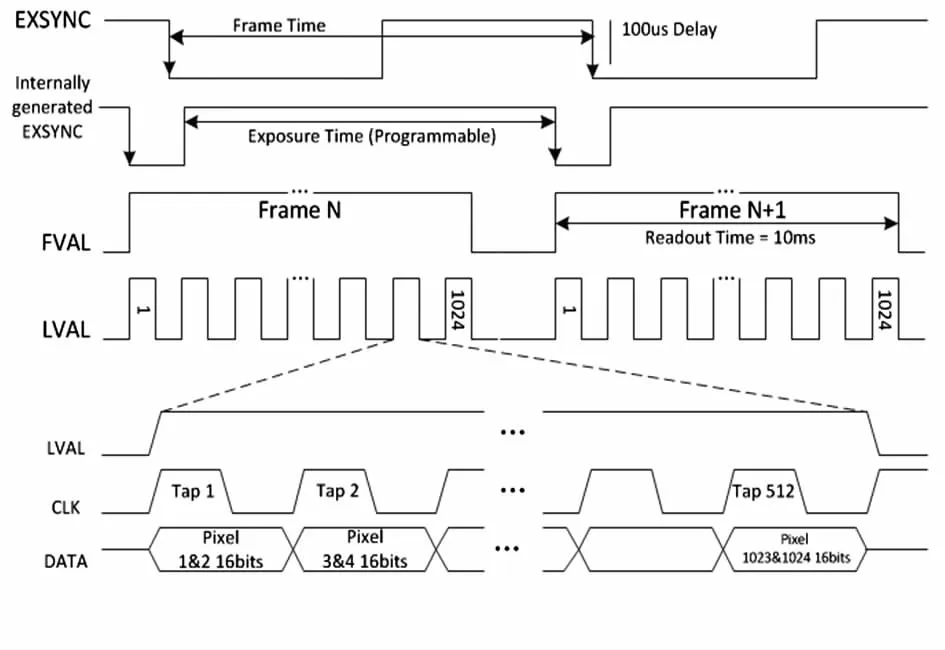
图4 图像曝光与采集时序图
帧有效FVAL和行有效LVAL都为高电平时,每个时钟周期(12.5 ns)输出2个像素数据。根据测算LVAL低电平的行消隐期有121个CLK周期,故一帧图像的传输时间有
[1 024×(512+121)-121]×12.5≈8.1 ms.
(8)
图像传输为后续计算模块保留了时间裕量。有效像素重组过程如图5所示,在片上内存构建缓冲池(图2中on-chip SRAM1),将2行图像定义为奇数列和偶数列。当获取奇数列时纵向暂存在缓冲池的左半边;当获取偶数列时纵向暂存在缓冲池的右半边,而此时每个周期写入新数据的同时,横向读取3个偏振像素即为所需的0°,60°,120°有效偏振像素。
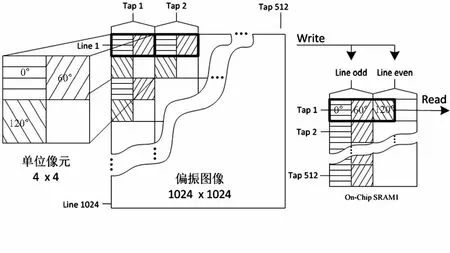
图5 偏振像元的有效像素重组
利用3个有效偏振像素,即可按照式(7)以流水线方式计算偏振方位角,但须先判断反正切内分式的分母是否为0,如果为0则直接得到π/4的结果。式(7)涉及反正切的计算,在FPGA上适宜采用加减和移位定点操作。为保证偏振方位角计算精度,模块内核心计算数据保留32位,而输出结果保留16位即可得优于0.001°精度,为后续对称轴提取的算法保留了提升精度的空间,如图6所示。

图6 偏振角计算和对称轴提取流程图
对称轴提取模块分拣前级求得的偏振方位角数据流,保存载有重要信息的数据到缓存区(图2中on-chip SRAM2),先后进行初次级对称性分析,从而求得相对航向角θ。对称性分析算法采用DSP Builder仿真,利用Signal Compiler编译适配到硬件上验证。此方法简化了算法硬件化流程,并为算法验证预留了空间和接口,提供高效的算法研究平台。硬件并行计算相比软件顺序执行可以显著缩短图像处理时间,提高实时性。
3.3 SOPC软核系统
SoPC Builder是系统定义和组件定制的强大工具,可轻松构建如图2中虚线框内的SOPC。Nios II EDS针对Nios II处理器进行软件开发、编译和调试等,程序运行流程如图7所示。
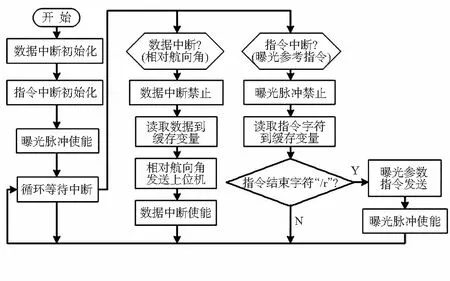
图7 程序运行流程框图
主程序开始后,先后初始化数据和指令中断,然后使能曝光脉冲,最后进入循环等待中断状态。
数据中断子程序中,读取相对航向角到缓存变量,通过UART1模块将数据发送到上位机后返回循环等待中断状态。
指令中断优先级高于数据中断,依次读取指令字符到缓存变量。当指令结束时将缓存指令通过UART2模块发送到检偏成像部分后返回循环等待中断状态。指令中断子程序中先后禁止和使能曝光脉冲,保证了此过程中无数据中断发出。
4 系统验证
为了验证偏振光栅传感器电子系统,设计偏振检测成像部分的模拟器与其对接。用天空偏振探测装置[12]获取不同偏振方向、相同分辨率的真实偏振图像,按照偏振像元位序空间采样,提取用于系统验证的图像,然后下载到模拟器的存储器中,采用与图4完全相同的时序输出,这样便可以验证电子系统的采集和通信功能。通过DSP Builder例化一个对称性分析算法到相应模块中,用于测试电子系统的实时性和计算精确度。
图8所示为系统验证逻辑连接框图,在上位机上完成所需的程序数据配置和计算结果显示。
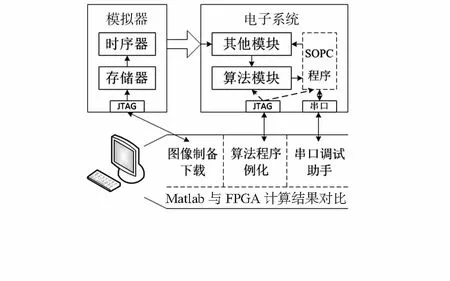
图8 系统验证框图
在清华大学中央主楼北侧不同时刻获取4幅图像用于系统验证。Matlab采用双精度格式运行相同算法程序与电子系统计算结果对比。表1所示两者的计算结果差值的绝对值都小于0.01°,说明电子系统的计算精度优于0.01°。此外,模拟器以20 Hz帧率重复输出图像,电子系统可顺利完成采集、计算和通信功能。图9为表1中第2个合成偏振图像与偏振角度图,其中白线标识出对称轴。
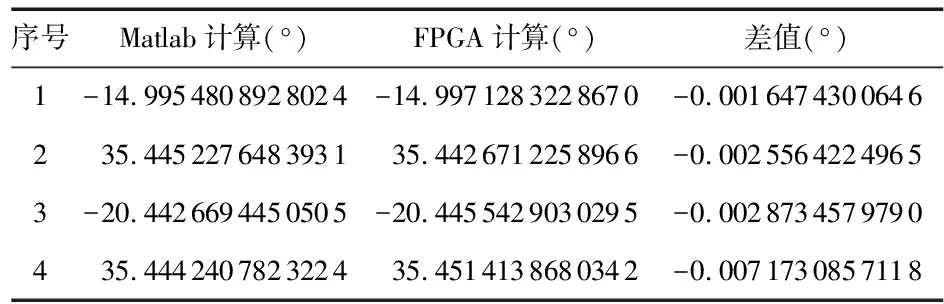
表1 验证测试结果

图9 图像合成与处理结果
5 结 论
偏振光栅导航传感器使用偏振感光器阵列而具有更高的定向精度。本文设计适应图像信息处理的电子系统,它能以20 Hz帧频率采集、处理偏振图像,其定点计算精确度
优于±0.01°。电子系统为导航算法研究提供验证平台,同时也作为传感器样机的重要部分。
参考文献:
[1]Labhart T.Polarization-sensitive interneurons in the optic lobe of the desert ant Cataglyphis bicolor[J].Naturwissenschaften,2000,87(3):133-136.
[2]晏 磊,关桂霞,陈家斌,等.基于天空偏振光分布模式的仿生导航定向机理初探[J].北京大学学报:自然科学版,2009(4):616-620.
[3]赵开春,褚金奎,姚弘轶,等.Rayleigh大气天空光偏振分布仿真与预测[J].四川大学学报:工程科学版,2007,39(5):287-291.
[4]Lambrinos D,Moller R,Labhart T,et al.A mobile robot emp-loying insect strategies for navigation[J].Robotics and Autonomous Systems,2000,30(1-2):39-64.
[5]高 隽,范之国,潘登凯,等.平面四通道大气偏振信息检测传感器:中国,101441169[P].2009—05—27.
[6]褚金奎,王洪青,戎成功,等.基于偏振光传感器的导航系统实验测试[J].宇航学报,2011(3):489-494.
[7]Javaan Chahl,Akiko Mizutani.Biomimetic attitude and orientation sensors[J].IEEE Sensors Journal,2012,12(2):289-297.
[8]尤 政,赵开春,于泽江,等.偏振光栅导航传感器:中国,101865692A[P].2010—10—20.
[9]Labhart T,Petzold J,Helbling H.Spatial integration in polarization-sensitive interneurones of crickets:A survey of evidence,mechanisms and benefits[J].Journal of Experimental Biology,2001,204(14):2423-2430.
[10] 新谷隆一.偏振光[M].北京:原子能出版社,1994.
[11] PULNiX.2000,Specifications of the camera link interface standard for digital camera and frame grabbers[S].America.
[12] 赵开春,卢 皓,尤 政.天空光偏振模式自动探测装置[J].光学精密工程,2013(2):239-245.
猜你喜欢
物理学报(2022年23期)2022-12-14
小哥白尼(军事科学)(2022年2期)2022-05-25
空间电子技术(2020年5期)2020-03-11
红领巾·萌芽(2019年8期)2019-08-27
电子制作(2019年12期)2019-07-16
测控技术(2018年6期)2018-11-25
现代职业教育·中职中专(2018年11期)2018-06-11
中国与非洲(法文版)(2017年10期)2017-11-23
CHIP新电脑(2016年3期)2016-03-10
中国中医药现代远程教育(2014年14期)2014-03-01
