
地面三维激光扫描仪在建筑物立面测量中的应用
2014-09-20 02:25浙江省统一征地事务办公室吴义正
浙江国土资源 2014年11期
浙江省统一征地事务办公室 吴义正
地面三维激光扫描仪在建筑物立面测量中的应用
浙江省统一征地事务办公室 吴义正
地面三维激光扫描技术的出现是以三维激光扫描系统的诞生为代表,是继GPS技术以来测绘领域的又一次技术革命,它使测绘数据的获取方法、服务能力与水平、数据处理方法等进入新的发展阶段。三维激光扫描测量技术克服了传统测量技术效率低、信息损失大、专业性难以推广的缺点,能对任何物体进行扫描,快速高效地将现实世界的环境信息转换成易于处理的数据,最大程度的还原了真实社会环境,具有信息量丰富、直观可视、便于使用、扩展性强的特点。在建筑物立面测量领域,三维激光扫描测量技术的出现和发展,克服了传统建筑立面测量的局限性,它不再是利用皮尺、测距仪等简单工具进行建筑物长宽高的测量模式,而是能对建筑物进行无接触、快速、高精度扫描,同时将获得的点云信息快速转换成计算机可以处理的数据的高效测量方式。解决了建筑物立面数据人工采集时所带来的精度损失、效率损失等问题,尤其是解决了高层建筑物立面元素无法量测的问题。
一、地面三维激光扫描仪工作原理及技术优势
(一)工作原理
地面三维激光扫描系统主要由三部分组成:扫描仪、控制器(计算机)和电源供应系统。激光扫描仪本身主要包括激光测距系统和激光扫描系统,同时也集成CCD和仪器内部控制和校正系统。三维激光扫描系统根据测距原理不同分为脉冲式扫描系统、相位式扫描系统和三角测量式扫描系统。目前市场流行的地面三维激光扫描仪主要是脉冲式,脉冲式测距由于激光的发散角小,激光脉冲持续时间极短,瞬时功率极大,因而测距范围可以达到几百米,甚至上千米。脉冲式三维激光扫描仪通过两个同步反射镜快速而有序地旋转,将激光脉冲发射体发出的窄束激光脉冲依次扫过被测区域,测量每个激光脉冲从发出经被测物表面再返回仪器所经过的时间(或者相位差)来计算距离,同时内置精密时钟控制编码器,同步测量每个激光脉冲横向扫描角度观测值和纵向扫描角度观测值。激光扫描系统的原始观测数据除了两个角度值和一个距离值,还有扫描点的反射强度,两个角度值和一个距离值用于计算扫描点的三维坐标值,反射强度用来给反射点匹配颜色。拼接不同站点的扫描数据时,需要用公共点进行变换,以统一到同一个坐标系统中。

图1 作业流程图
(二)技术优势
在建筑物立面测量作业中,三维激光扫描技术与全站仪等单点采集三维数据的方法相比:
1.对被测目标要求不同
全站仪只能测量反射棱镜所在位置的点位坐标,被测物体必须是棱镜能够到达的地方,难以对危险区域或测量人员难以到达的区域进行测量。而三维激光扫描不需要接触被测物体就可以工作。
2.对观测环境的要求不同
全站仪因为需要瞄准棱镜,必须在白天或者较明亮的地方进行测量。而三维激光扫描测量可以全天候的进行测量。
3.测量精度不同
三维激光扫描仪和全站仪的单点定位精度都是毫米级的,三维激光描仪的定位精度比全站仪略低,但是目前部分全站式三维激光扫描仪已经可以达到全站仪的精度,满足立面测量的精度是足够的。
4.获取数据的量不同
全站仪只能够有限度地获取目标的特征点。而三维激光扫描仪可以获取高密度的观测目标的海量数据,采样速率高,对目标的描述细致。
二、技术路线
本文结合杭州市某新农村立面测量项目,提出地面三维激光扫描仪在建筑物立面测量中的作业流程,如图1所示。
(一)点云数据获取
1.仪器参数
本次扫描采用Leica ScanStaion C10扫描仪,基本参数如下:
测量精度:点位精度6mm、距离精度4mm、模型表面精度2mm。
测程:0.1-300m 。 扫描视场:360°×270°。
扫描速率:50000点/秒。
2.控制测量与测站布设
地面三维激光扫描外业控制可视测区具体情况采用相对定位与绝对定位两种方式。本次外业的测区为房屋密集地区,测区外围省级CORS站信号覆盖良好,内部由于房屋密集GPS信号较弱,因此本次作业控制测量采取外围布设控制点,内部采取支站的方式进行。
地面三维激光扫描作业测站布设应当能够完全覆盖测区范围,站站之间距离应能够保证一定的点云重叠度。由于建筑物密集且建筑物之间的间隙很小,因此本次扫描作业采取在建筑物四个角点均布设测站的方式。
(二)点云数据处理
1.点云数据预处理与配准
点云数据预处理与配准采用徕卡公司的配套处理软件Cyclone。将外业采集的数据导入Cyclone软件,各站数据需要通过公共点进行拼接,由于本次扫描作业拥有地面控制成果,因此可通过软件自动对各站点云数据进行拼接配准。拼接完成的点云数据还需进行统一化处理,目的在于将模型空间里的多块点云合成为一个单一有效的点云。配准后的点云数据如图2所示。
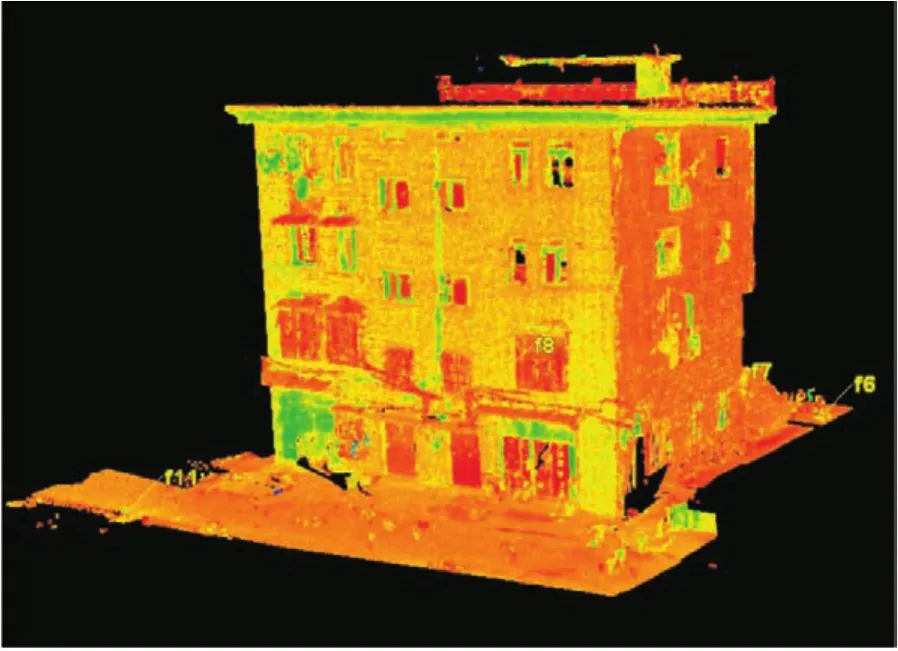
图2 建筑点云图
2.点云切割与空间坐标系建立
经过统一化的点云数据是包含测站范围内所有地物三维坐标信息的整体数据,通过切割点云可以获得各个独立建筑物的有效数据。为了使得各建筑物各立面数据能够正确投影到二维平面上,需以建筑物立面数据为依据建立空间坐标系。单体子集点云如图3所示。

图3 单体点云数据图
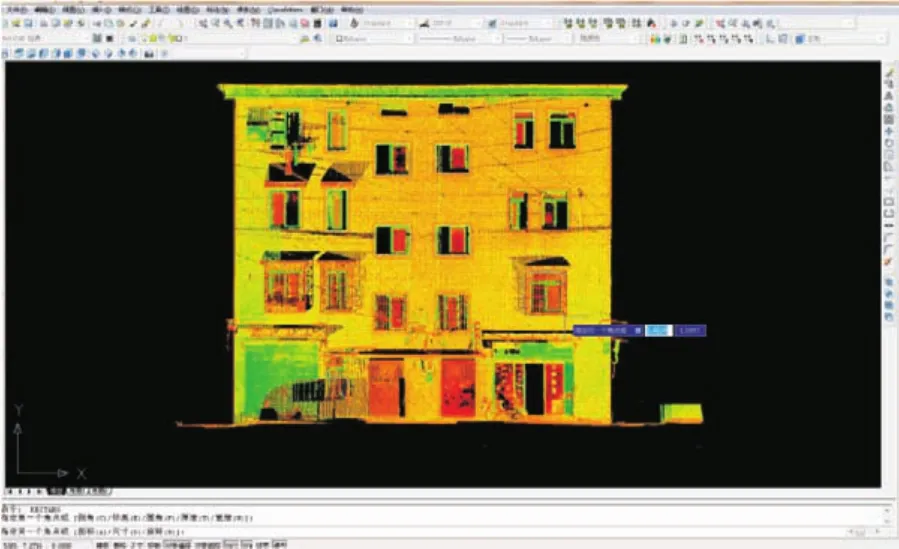
图4 立面矢量化描绘图
(三)立面图绘制
立面图通常采用AutoCAD软件绘制,通过CloudWorx插件可以完美实现Cyclone与AutoCAD的连接。将处理完成的建筑物点云数据加载到AutoCAD中,通过三维静态显示可以切换到建筑物各个立面,在平面上进行矢量化描绘,如图4所示。将描绘完成的立面图附以俯视图与建筑物现场照片即可输出建筑物立面测绘成果,如图5所示。

图5 立面图
三、结语
本文立足测绘新技术的应用,介绍了地面三维激光扫描仪的原理与技术特点。结合杭州市某新农村立面测绘项目对地面三维激光扫描仪运用于立面测绘领域的技术优势、路线进行了详细的阐述。地面三维激光扫描仪快速、准确、高效等技术优势在建筑物立面测绘领域得到充分的展现,取得了较好的成效。
地面三维激光扫描仪的出现与工程化应用必将改变传统测绘作业模式,提高作业效率。地面三维激光扫描仪采集的激光点云数据不仅仅可以在立面测绘领域应用,它也可以用于建筑物三维建模、城市日照分析等领域。相信随着技术的发展,规范的完善,地面激光扫描仪必将在测绘领域发挥越来越大的作用。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
模具制造(2019年3期)2019-06-06
铁道标准设计(2018年12期)2018-11-22
中成药(2017年12期)2018-01-19
现代职业教育·中职中专(2016年4期)2016-10-21
现代营销·经营版(2015年3期)2015-04-20
弹箭与制导学报(2015年1期)2015-03-11
现代营销·经营版(2013年5期)2013-05-14
