
滑动吸附式壁面清洁装置的设计与研究
2014-09-19 06:10丁珠玉
重庆文理学院学报(社会科学版) 2014年5期
周 杰,樊 利,丁珠玉,雷 宇
(1.西南大学工程技术学院,重庆 北碚 400716;2.西南大学电子信息工程学院,重庆 北碚 400716)
滑动吸附式壁面清洁装置的设计与研究
周 杰1,樊 利2,丁珠玉1,雷 宇1
(1.西南大学工程技术学院,重庆 北碚 400716;2.西南大学电子信息工程学院,重庆 北碚 400716)
为实现对高楼玻璃幕墙灵活、高效地清洁作业,设计了一种滑动吸附式壁面清洁装置,分析了清洁装置的转向运动学和动力学模型,阐述了清洁装置各组成部分的设计结构和工作原理.试验表明:该滑动吸附式壁面清洁装置可实现在玻璃幕墙的竖直方向全方位自由移动,控制灵活、操作简单,具有较高的经济性和实用性,有较好的市场应用前景.
滑动吸附;壁面清洁;单片机控制
壁面清洁装置是集机械设计、传感技术、控制学和信息科学等技术为一体的工程作业类机器人,它能够在玻璃幕墙壁面自由滑动并对壁面进行清洁作业,代替人完成危险的高楼幕墙的清洗工作.由于它具有擦洗效率高、擦洗效果好、智能化高、安全性及适应性强等优点,因此具有重要的研究意义及实用价值.目前,国内外学者对爬壁机械装置的研究主要集中在吸附方式以及移动方式两个方面.其中,吸附方式主要包括磁吸附、负压吸附两种[1-2].负压吸附方式不受壁面材料限制,在导磁材料及玻璃等平整表面均可自由运动,且它具有简单、方便、易控制、跨越微小障碍等优点,因此得到广泛使用[3-4].移动方式主要包括履带式、腿足式、轮式等[5-6].履带式接触面积大,壁面适应性强,但系统机动性较差[7];足式越障及承载能力强,机动性好,但移动速度较慢[8];轮式移动速度快,易控制,但接触面积较小[9-10].考虑到高效的工作速率和灵活操纵性能是机器人未来发展的方向,因此,本文设计了基于滑动吸附式工作原理的多吸盘四轮驱动的玻璃壁面清洁装置,分析了该装置防止滑落及倾覆的动力学条件,讨论了其硬件电路结构和软件程序设计.该装置采用轻质铝板作为底盘,两个子吸盘用于吸附,四轮驱动增加接触面和驱动力,因此该装置具有重量轻、体积小、操作方便、运动灵活等优点,适于清洁面积较小的玻璃等平面幕墙.
1 壁面清洁装置结构的设计
四轮驱动双吸盘清洁装置机械结构如图1所示.该装置质量约3 kg,长×宽×高尺寸为450 mm×250 mm×100 mm.主要由清洗装置、检测传感器、控制电路板、滑动吸盘、驱动装置等组成.它依靠吸附力和轮子的摩擦力实现墙面攀爬,通过外挂清洗装置清洗玻璃.
由于清洁装置在玻璃等光滑表面爬行时,需要较小的自重、较大的驱动、良好的吸附以及较好的清洁效果,因此本文采用加强铝质薄板作为底盘架构以减轻装置重量,提高机器的运动灵活性.为实现较大的驱动,本文设计四轮驱动的传动结构,采用两个直流伺服电机驱动左右两个主动轮,然后通过同步带带动同侧的从动轮,实现四轮驱动,因此驱动力较大.同时,采用4轮驱动的方式,支撑力分布均匀,车体稳定性好.为实现紧密吸附,吸附装置采用耐磨耐腐蚀的圆形吸盘.该吸盘滑动摩擦力较小,密封效果好,且滑动吸盘通过微型离心真空泵在吸盘密封腔内产生负压进而紧密吸附在玻璃墙面上.同时,该吸附装置采用两个子吸盘的吸附结构(子吸盘的个数可以增加),每个子吸盘由各自的阀门控制,当任意一个子吸盘发生泄漏时,其阀门可以及时地调整来控制负压值,并能利用吸盘弹性裙边的变形来适应壁面的凹凸不平,保证吸盘与壁面可靠密封.因此,这种多子吸盘的结构使得吸盘在遇见较小的沟槽和凹凸面时,吸盘内的负压也可以维持平衡.为了保证良好的清洁效果,作者通过固定架在机器人前端安装一个清洁滚刷,滚刷上交替插满软硬刷毛,由减速电机驱动滚轮转动对玻璃进行清洗.

图1 清洁装置机械结构图
2 壁面清洁装置的稳定性和可靠性分析
清洁装置在竖直壁面以轮式方式移动时,对壁面的吸附能力和上下移动能力是系统考虑的重要指标.同时,防止清洁装置滑落和倾覆也是必须加以考虑的重要安全因素.为了对以上的问题进行讨论,本文做了如下假设:①本文研究的清洁装置为刚体;②清洁装置的质心与其几何中心重合;③清洁装置的4个驱动轮始终与玻璃墙面接触且受力均衡;④拖曳负荷等其他外因的影响由安全系数Y表示;⑤以玻璃幕墙等平整壁面为清洁对象,忽略工作面的不规则.
2.1 滑动受力分析
为讨论清洁装置吸附与移动问题,如图2所示为壁面清洁装置在壁面上处于静止状态时的受力分析图.要使清洁装置既能吸附又能移动,应满足如下的条件:
1)要使清洁装置吸附于壁面不致脱离,应使吸盘产生的最大静摩擦力大于负载和车体产生的重力,即:

2)要使清洁装置自如地向上移动,应使4只橡皮车轮产生的牵引力大于负载车体的重力和2个吸盘产生的动摩擦力之和,即:


图2 理想受力分析图
其中,若清洁装置满足向上移动的条件,即向下移动也可实现.在公式(1)和(2)中,F为吸盘产生的吸附力;μ为清洁装置与壁面之间的静摩擦系数,一般取值0.4;Y为考虑了拖曳负荷等因数的安全系数,一般取值2.5;G为负载和车体的

其中,P绝对压力为微型真空泵的绝对真空度,取值20 kPa;S吸盘面积为两个吸盘总的有效面积,约为39 cm2;T为减速比1∶20的电机输出的总扭矩10 N·m;D为橡皮轮胎直径65 mm;μw为橡胶车轮与玻璃壁面的附着系数,一般取值0.35;μd为吸盘壁面之间的动摩擦系数,一般取值0.2;N1为图示的两个吸盘所受的压力之和.
将以上的数据代入相应公式,求解得吸盘吸附于壁面的最大吸附力F约为309.6 N,吸盘产生的最大静摩擦力Fμ为123.8 N,而负载和车体产生的重力YG约为73.5 N,重力远远小于最大静摩擦力,因此清洁装置能够吸附于壁面不脱离.由于吸附力F由2个吸盘和4个车轮共同作用产生,由图2可以看出:F=N1+2N2+2N3,因此两个吸盘所受的压力之和N1应小于最大吸附力F,即N1≤309.6 N.将N1的取值代入公式(2),求解得当 N1≤309.6 N时,公式(2)的 Ff≥YG+Fd的关系始终成立,说明系统满足向上移动的条件.同时,若清洁装置满足向上移动的条件,即向下移动也可实现.因此,本系统既能吸附又能移动.
2.2 倾覆分析
根据前面的假设条件,如图2所示的壁面清洁装置在壁面上不倾覆的条件是:∑M≥0.即:重力,约为29.4 N;Ff为橡皮车轮产生的牵引力;Fd为吸盘的动摩擦力.

将吸附力F、牵引力Ff、动摩擦力Fd的计算公式代入公式(1)和(2)可以求解系统,即满足吸附条件和上下移动条件.

由于清洁装置吸附在壁面上时,4个车轮与墙面均有接触,即吸附力N2≥0,因此进一步推导公式(7),可得清洁装置不发生倾覆的条件为:(8)式中,L为清洁装置的重心与壁面间的距离,约为50 mm;l2为车轮到清洁装置重心的垂直距离,约为150 mm.将相应的数据代入公式(8),可得当N1≤285.1 N时,清洁装置在清洁墙面不会发生倾覆.
综上所述,针对本实验系统,要使清洁装置能够可靠地在玻璃壁面移动和吸附,同时满足不发生滑动及倾覆事故的条件,即要求吸盘所受的压力N1≤285.1 N.由于本系统采用双吸盘的真空吸附方式,当吸盘腔在壁面上移动时,由于泄漏进入负压腔内的气体与真空泵从负压腔内抽出的气体总量相等,负压腔内总能形成负压平衡,因此系统可以通过真空泵来调节压力分配,使吸盘所受的压力小于285.1 N.
3 硬件电路与设计
3.1 硬件电路的结构分析
如图3所示为滑动吸附式壁面清洁装置的硬件结构框图.主要由主控制模块、传感器模块、电源模块、驱动模块、无线通信模块组成[11].系统采用飞思卡尔半导体公司生产的MC9SXS128单片机作为微控制处理器;大功率锂电池和DC-DC直流升压电路组成电源部分;IR2147和IRF3205组成电机的直流桥式驱动电路;ZIGBEE模块的CC2530实现无线通信.

图3 硬件电路组成框图
3.2 主控制模块单元电路设计
主控制模块最小系统如图4所示,包括:电源电路、复位电路、时钟发生电路、BDM接口电路和传感器信号采集电路.由于控制芯片XS128所需工作电压VCC为5 V,因此,电源部分采用能最大输出3 A电流的LM2596-5V芯片进行电压转换;为提高时钟的信号质量以及稳定性,使用16 MHz的有源晶振产生系统时钟;AD转换参考电压VRH由VCC直接经电阻MR3(0Ω)提供;VDD为内核滤波电路,由MC14、MC15组成;VDDF为内部Flash滤波电路,由MC16、MC17组成.
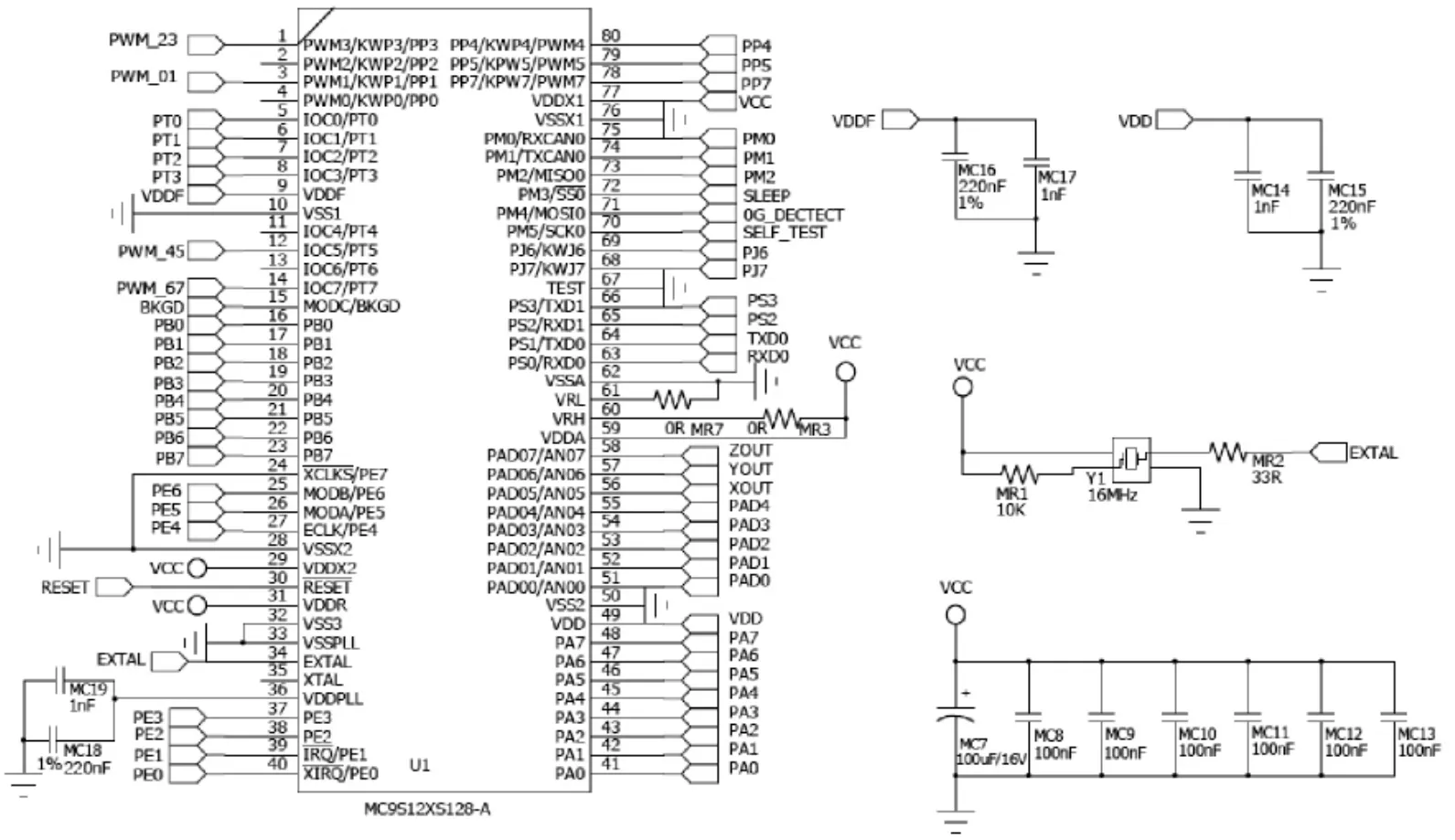
图4 主控制模块最小系统图
3.3 驱动模块电路设计
直流电机驱动电路如图5所示.在该电路中画出了壁面清洁装置中2个直流电机的控制电路,电机额定电压为12 V,最大额定电流10 A,额定功率12 W.电机控制信号由PWM口输出0~5 V的直流电平控制信号.其中,PWM01、PWM23控制执行电机M1,经U2前置驱动后,由后置桥式驱动电路Q1~Q4输出电机控制信号,控制执行电机 M1的转速和转向;PWM45、PWM67控制执行电机M2,经U3前置驱动后,由后置桥式驱动电路Q5~Q8输出电机控制信号,控制执行电机M2的转速和转向.

图5 直流电机驱动电路图
4 软件程序的设计
软件控制程序是壁面清洁装置的控制核心,负责该清洁装置各种动作执行的指挥,主要完成:前端检测、数据处理、控制执行3个任务.其中,前端检测任务是控制、协调各子系统的正常工作;数据处理任务是对各种传感器获得的数据进行数据处理与数据融合;控制执行任务是实时发出控制指令,控制装置完成相应的功能[12].

图6 软件架构图
5 结语
滑动吸附式壁面清洁装置能对玻璃幕墙、光滑墙面等进行清洗作业,具有体积小、反应灵敏、运行效率高、成本低的特点.通过在实验室户外玻璃幕墙的清洗实验,得出如下结论:
1)通过对壁面清洁装置的稳定性和可靠性分析,当吸盘在壁面上移动时,允许一定的泄漏量,负压腔内的气体进入量与真空泵从负压腔内抽出的气体总量相平衡,在装有两个直径为50 mm吸盘的条件下,可通过小于10 mm的间隙.
2)清洁装置调速控制以1~5 m/min爬行速度前进、后退和转弯运动较为适宜;清洗机构滚轮转速50~100 r/min时清洗效果最佳,按清洁装置移动速度和清洁面直径进行计算,单位清洗面积可达到40~80 m2/h.
3)采用三维倾角传感器感知行走状态,通过程序控制,在发生故障时启动安置在顶楼的安全保护机构防止装置跌落,提高工作过程中装置的安全性.
[1]薛胜雄,任启乐,陈正文,等.磁隙式爬壁机器人的研制[J].机械工程学报,2011,47(21):37-42.
[2]彭晋民,李济泽,邵洁,等.负压爬壁机器人吸附系统研究[J].中国机械工程,2012,23(18):2160-2164,2168.
[3]朱志宏,李济泽,彭晋民,等.微小型壁面检测爬壁机器人移动平台研究[J].机械工程学报,2011,47(3):49-54.
[4]崔旭明,孙英飞,何富君.壁面爬行机器人研究与发展[J].科学技术与工程,2010,10(11):2672-2677.
[5]王富杰,孙静,王吉岱,等.壁面移动机器人移动方式及移动机构的研究进展[J].机械传动,2012,36(6):115-120.
[6]付宜利,李志海.爬壁机器人的研究进展[J].机械设计,2008,25(4):1-4.
[7]王兴如,衣正尧,弓永军,等.履带式船舶除锈爬壁机器人关键机构设计[J].机械设计,2009,26(12):32-34,71.
[8]雷静桃,高峰,崔莹.多足步行机器人的研究现状及展望[J].机械设计,2006,23(9):1-3,11.
[9]张兴悟,章永华,杨杰.高机动性小型清洁爬壁机器人的研究[J].机械研究与应用,2007,20(2):28-30.
[10]李志海,付宜利,王树国,等.四轮驱动滑动吸盘爬壁机器人的动力学研究[J].机器人,2010,32(5):601-607.
[11]冀杰,翟彦博,彭和.基于三维虚拟环境的车辆跟随硬件在环仿真系统设计[J].西南大学学报:自然科学版,2013,35(6):1-9.
[12]刘永春,关义平,杨静.基于GSM及单片机的汽车防盗报警系统设计[J].西南大学学报:自然科学版,2013,33(7):170-172.
(责任编辑 吴 强)
Design and research of a wall cleaning device based on sliding absorption
ZHOU Jie1,FAN Li2,DING Zhuyu1,LEIYu1
(1.College of Engineering and Technology,Southwest University,BeibeiChongqing 400716,China;
2.College of Electronic and Information Engineering,Southwest University,BeibeiChongqing 400716,China)
In order to clean glass curtain wall of high building flexibly and efficiently,this paper designs a novel wall cleaning device with sliding absorption.In this paper,the author analyzes the steering kinematics and dynamicsmodel of cleaning device,expounds the design structure and working principle of each part of cleaning device.The tests indicate that the sliding absorption wall cleaning device can realize omnibearing freemovement in the vertical direction of glass curtain wall,ithas the characteristics of flexible control,simple operation,high economy and practicability,and the system has good market application prospect.
sliding adsorption;wall cleaning;single chip microcomputer control
TP274
A
1673-8004(2014)05-0089-05
20140-03-03
国家大学生创新实验计划资助项目(201210635120);中央高校基本科研业务费专项(XDJK2011C063).
周杰(1991-),男,重庆合川人,主要从事车辆工程方面的研究.
丁珠玉(1980-),男,重庆垫江人,副教授,高级实验师,主要从事机电一体化技术方面的研究.
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
建材发展导向(2022年10期)2022-07-28
制造技术与机床(2018年11期)2018-11-23
意林(绘英语)(2018年1期)2018-04-28
临床医药文献杂志(电子版)(2017年11期)2017-05-17
中国医学装备(2016年6期)2016-12-01
浙江大学学报(工学版)(2016年11期)2016-06-05
城市轨道交通研究(2015年11期)2015-02-27
雷达学报(2014年4期)2014-04-23
振动工程学报(2014年4期)2014-03-01
