一种新型平衡自调节系统在土工离心机上的应用
2014-09-17 12:01,,,,
长江科学院院报 2014年1期
, ,,,
(中国工程物理研究院 总体工程研究所,四川 绵阳 621900)
1 研究背景
土工离心机是土力学研究和岩土离心模型试验的重要设备,平衡调整系统作为离心机的重要组成部分,将直接影响离心机运转的稳定性、安全性和使用寿命[1-4]。
土工离心机自身有一定的不平衡力承受范围,早期的离心机没有设计平衡调节机构。实验者在离心机运转前,根据力矩平衡关系,采用配重块将离心机两端大约配平,然后开展试验。这种方法不仅要求人工计算很准确,还要求配重块规格齐全,给试验带来诸多不便[5-7]。
目前,大部分土工离心机上都已经配备平衡调整系统,大多在转臂上设计可移动的机构,例如利用液压缸或电机驱动一个配重块来回移动,来调节离心机的平衡。这种机构安装在离心机转臂上,不仅增加了结构的复杂性,而且配重块的质量和移动距离有限,不平衡调节范围也不大[3,8-10]。
文中设计了一套平衡自调节系统。该系统构建了一套由电磁阀、传感器、PLC控制器组成的反馈控制系统,通过它向安装在配重端的水箱中受控注水,来实时调节工作端载荷变化引起的不平衡。当工作端负载增加以后,传感器测出不平衡力,注水阀打开,水箱中开始注水,直到不平衡力接近零,注水阀关闭,停止注水。将该系统应用到某土工离心机上,试验结果表明,在离心场和负载任意增大时(只要不超出离心机的承载范围),该系统均能实现离心机的平衡自调节。相对传统的液压缸或电机驱动配重块的平衡调节机构,该系统结构更简单、不平衡调节范围更宽。
2 系统研制
2.1 离心机平衡原理
以不等长臂土工离心机为例,如图1所示,m1为试验模型的质量;r1为试验模型质心至旋转中心的距离;m2为配重体的质量;r2为配重体质心至旋转中心的距离;ω为离心机运转的角速度,则离心机运转以后的不平衡力为
F=(m1r1-m2r2)ω2。
(1)

图1 离心机平衡原理示意图Fig.1 Schematic diagram of the principle of centrifuge balance
由式(1)可知,在离心机运转前通过配平(即调整m2的值),基本可以保证F值很小。但由于试验模型的质心很难找准,而且离心试验时可能出现模型垮塌、质心移动等情况,导致工作端载荷增大,从而产生未知不平衡力。这种不平衡力在离心机转速ω越高时越明显,因此,在离心机上增加实时的自平衡调节系统十分必要。
2.2 系统结构组成
目前土工离心机上配备的平衡调整机构大多安装在转臂上,例如利用液压缸或电机驱动一个配重块来回移动,来调节离心机的平衡。这种调节机构增加了离心机结构的复杂性,而且配重块有限的质量和移动距离也限制了平衡调节范围。
本文设计了一套由水箱、阀模块、测力传感器、控制器组成的平衡自调节系统,如图2所示。该系统在配重端放置了一水箱,可往箱中注水;在转臂支承处安装了4个测力传感器,可测量离心机运转后的不平衡力;在离心场很小的仪器舱内安装了阀模块和控制器,与传感器一起组成了反馈控制系统。当工作端负载增加时,通过反馈控制系统往水箱中受控注水,来实时调节载荷变化引起的不平衡。

图2 系统结构组成示意图Fig.2 Schematic diagram of the system composition
设水箱容量为m2,距旋转中心的距离r2,则该系统不平衡力调节范围为
F2=m2r2ω2。
(2)
由于m2可以任意设计(只要不超过离心机承载范围),且r2为转臂的整个工作半径,因此相对传统的液压缸或电机驱动配重块的调节结构,本系统的不平衡力调节范围更大。另外,系统结构简单,不在离心机转臂上加装任何设备,试验后拆卸也十分方便,不影响离心机的正常运转。
但是该系统是注水配重,仅适用于平衡预调节时配重端偏重的情况,因此在离心机运转前需要将配重端调重。
2.3 系统控制原理
系统控制原理如图3所示:阀模块由电磁开关阀和流量计组成,一端与水箱相连,另一端与离心机供水接头相连;控制器采用PLC,阀、传感器的信号直接进入相应模块,组成反馈控制系统。
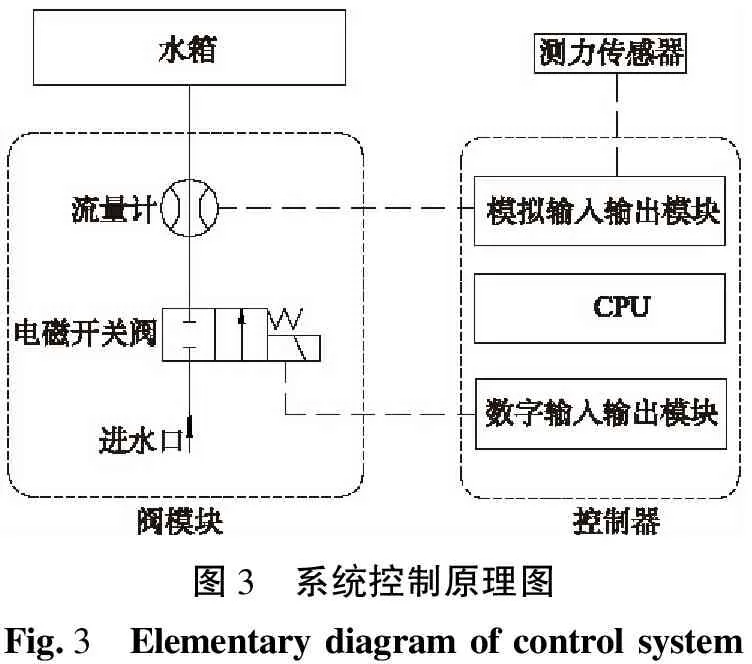
图3 系统控制原理图Fig.3 Elementary diagram of control system
系统工作流程(如图4所示):
(1) 工作端负载增加后,传感器测出不平衡力;
(2) 注水阀打开,水箱中开始注水;
(3) 不平衡力信号开始变化,若不接近0,注水阀一直打开,水箱中继续注水,若接近0,注水阀关闭,水箱中停止注水;
(4) 流量计记录本次注水量,完成一次自平衡调节。
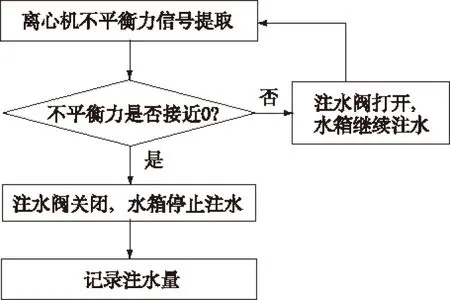
图4 系统工作流程示意图Fig.4 Work flow of the system
3 试验验证
将本平衡自调节系统安装在长江科学院CKY-200土工离心机上,如图5所示,水箱容量200 kg,质心距旋转中心约3.5 m,系统最大不平衡力调节值约为700ω2;本离心机转臂上所装的电机驱动配重块质量约200 kg,移动距离小于0.5 m,最大不平衡力调节值约为100ω2;可见,注水配平系统平衡调节范围更宽。

图5 应用于某土工离心机上的平衡自调节系统Fig.5 Photo of the self-adjusting balance system applied in a geotechnical centrifuge
采用该设备开展了相关的平衡自调节试验。
(1) 离心机运行前的平衡预调节。因为基于注水原理的配重端只能增加配重,所以预配重时必须使工作端稍重一点。根据离心机平衡原理,利用配重块进行平衡预调整:模型箱及箱内土料总重约550 kg,质心距离旋转中心约3.7 m;水箱重约120 kg,质心距离旋转中心约3.3 m,预先加配重块400 kg,质心距离旋转中心约3.8 m;计算得到不平衡质量约为Δm=(m1r1-m2r2-m3r3)/r=32 kg。
(2) 离心机升速过程的平衡自调节。预平衡调节完成后,离心机开始运转,共经历4个阶段,运转至100g,平衡调节系统共实现3次平衡自调节,水箱注水3次,如表1所示。可以看出:由于预平衡调节不可能使两边完全平衡,存在的不平衡量(Δm)在离心机低速运转时不明显,但在离心机运转至高速时会放大。若没有自平衡调节系统,较大的不平衡力将给离心机带来严重的后果,必须停机进行再次预平衡调节,给试验带来诸多不便。
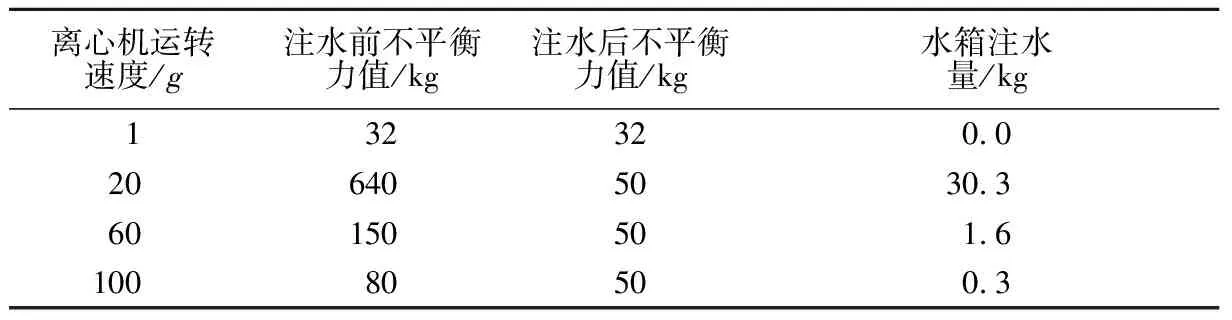
表1 离心机升速过程的平衡自调节结果Table 1 Results of self-adjusting balance in the presence of centrifuge speed acceleration
注:①不平衡力值为工作端力传感器值减去配重端力传感器值;②不平衡力值零检测的阈值设定为50 kg。
(3) 离心机负载增大过程的平衡自调节。离心机稳定在100g时,开展了模拟降雨试验。共往模型箱中降雨10次,单次降雨10 kg;平衡调节系统也相应往水箱中注水10次,完成10次平衡自调节,如表2所示。可以看出水箱注水量慢慢增加,这是由于注水越多、水位变高,导致质心距离旋转中心的距离减小的缘故。图6为试验完成后模型箱和水箱的情况。

表2 离心机负载增大过程的平衡自调节结果Table 2 Results of self-adjusting balance in the presence of centrifuge load increase
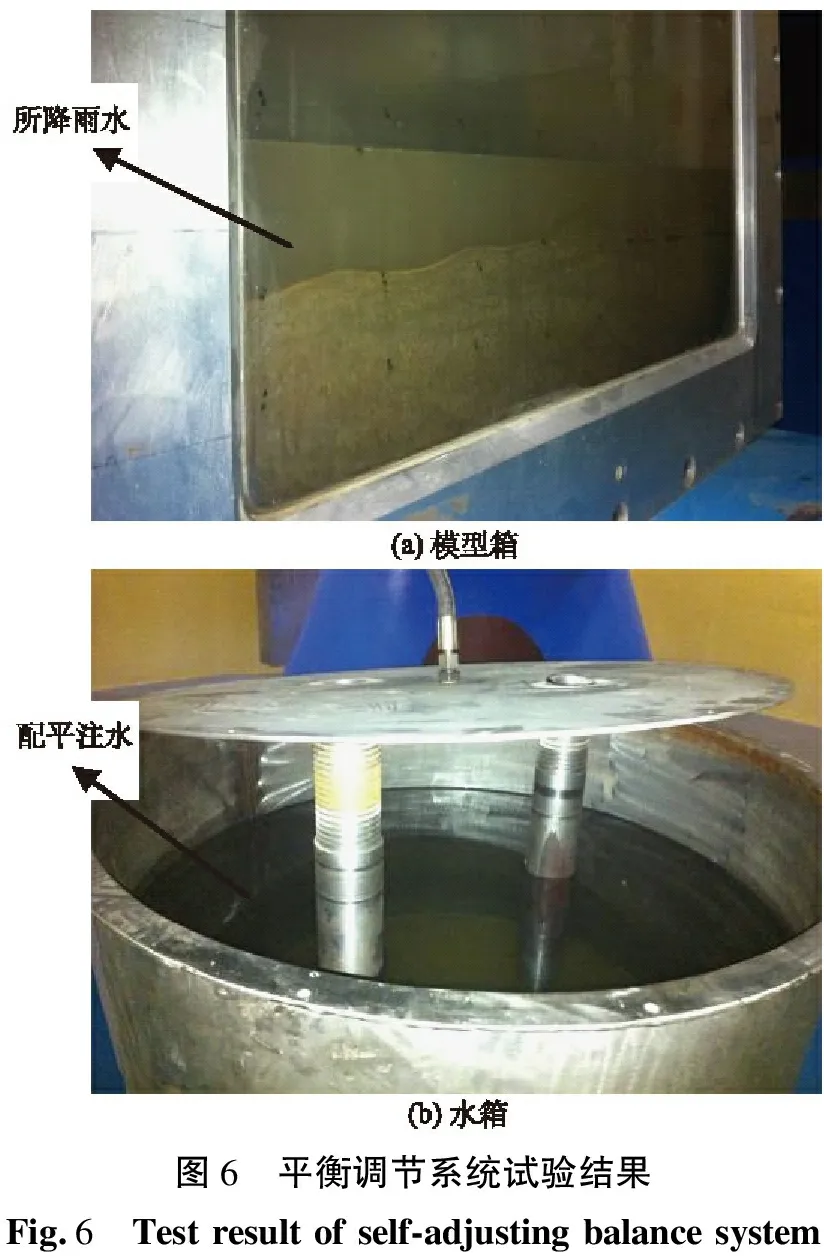
图6 平衡调节系统试验结果Fig.6 Test result of self-adjusting balance system
4 结 语
研制了一套平衡自调节系统,并应用于土工离心机上,开展了离心机升速过程和负载增大过程的自平衡调节试验,实现了离心机的实时配平。相对传统的液压缸或电机驱动配重块的平衡调节机构,该注水配平系统不在离心机转臂上安装任何机构,因此结构更简单;水流位移为转臂的整个工作半径,因此平衡调节范围更宽。
参考文献:
[1] 冯 振, 殷跃平. 我国土工离心模型试验技术发展综述[J]. 工程地质学报, 2011,19(3):323-331.(FENG Zhen, YIN Yue-ping. State of the Art Review of Geotechnical Centrifuge Modeling Test in China[J]. Journal of Engineering Geology, 2011,19(3): 323-331.(in Chinese))
[2] 程永辉, 李青云. 长江科学院土工离心机的应用与发展[J]. 长江科学院院报, 2012,28(10):141-147.(CHENG Yong-hui, LI Qing-yun. Application and Development of Geotechnical Centrifuge in Yangtze River Scientific Research Institute[J]. Journal of Yangtze River Scientific Research Institute, 2012,28(10):141-147.(in Chinese))
[3] 林 明. 国内土工离心机及专用试验装置研制的新进展[J]. 长江科学院院报, 2012,29(4):80-84.(LIN Ming. Progress of Geotechnical Centrifuge and Specialized Test Device in China[J]. Journal of Yangtze River Scientific Research Institute, 2012,29(4):80- 84.(in Chinese))
[4] 杨亚非, 霍 鑫. 离心机动不平衡量的配平方法[J]. 中国惯性技术学报, 2008,16(2):249-252.(YANG Ya-fei, HUO Xin. Balancing Method of Dynamic Unbalance Amount of Centrifuge[J]. Journal of Chinese Inertial Technology, 2008,16(2):249- 252.(in Chinese))
[5] SUN Shu-zu. Summary of Design of Geotechnical Centrifuge [M]. Nanjing: Nanjing Hydraulic Research Institute, 1990.
[6] 沈润杰, 何 闻. 离心机动力学特性分析及设计技术[J]. 工程设计学报, 2006,13(3):150-153.(SHEN Run-jie, HE Wen. Analysis on Dynamic Characteristics and Design of Centrifuge[J]. Journal of Engineering Design, 2006,13(3): 150-153.(in Chinese))
[7] 钱纪芸, 张 嘎, 张建民. 离心场中边坡降雨模拟系统的研制与应用[J]. 岩土工程学报, 2010,31(9):838-842.(QIAN Ji-yun, ZHANG Ga, ZHANG Jian-min. Development of Rainfall Simulation System for Centrifugal Model Tests[J]. Chinese Journal of Geotechnical Engineering, 2010, 31(9): 838-842.(in Chinese))
[8] 李晓琳, 牛宝良, 李明海. 基于液压伺服控制系统的离心机动平衡调节系统仿真[J]. 机床与液压, 2011,39(18):75-77.(LI Xiao-lin, NIU Bao-liang, LI Ming-hai. Simulation of Centrifuge Dynamic Balancing Control System Based on Hydraulic Servo Control[J]. Machine Tool & Hydraulics, 2011,39(18):75-77.(in Chinese))
[9] 李心耀, 洪建忠. 综合环境试验离心机静平衡调整系统设计[J]. 机械设计与制造, 2011,(8):44-46.(LI Xin-yao, HONG Jian-zhong. Design of Static Equilibrium Regulation System for Combined Environmental Test Centrifuge[J]. Machinery Design & Manufacture, 2011, (8):44-46.(in Chinese))
[10] 李顺利. 精密离心机动平衡新方法的研究[J]. 哈尔滨工业大学学报, 2001,33(4):428-430.(LI Shun-li. New Method of Dynamic Balance of Precision Centrifuge[J]. Journal of Harbin Institute of Technology, 2001,33(4): 428-430. (in Chinese))
猜你喜欢
初中生学习指导·提升版(2022年3期)2022-03-19
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
轮胎工业(2020年2期)2020-03-01
中国盐业(2018年20期)2019-01-14
女子世界(2017年3期)2017-03-13
临床肝胆病杂志(2017年1期)2017-03-07
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28