
基于PC104的天线转台伺服系统设计
2014-09-11 14:20李建峰
电子机械工程 2014年1期
徐 周,李建峰
(中国电子科技集团公司第三十八研究所, 安徽 合肥 230088)
基于PC104的天线转台伺服系统设计
徐 周,李建峰
(中国电子科技集团公司第三十八研究所, 安徽 合肥 230088)
为了稳定可靠地实现某天线转台伺服系统的圆扫、扇扫和定位3种工作方式,文中介绍了一种基于PC104的伺服系统的设计原理及软硬件实现方法,软件采用C语言编写。具体介绍了系统控制方式的设计及一种天线阵面风阻力矩、惯性力矩和摩擦力矩的计算方法,在此基础上讨论了驱动元件选型的计算。通过样机和多批次的实际使用验证,结果表明,该伺服系统设计合理、工作稳定、定位准确、安全可靠,满足所有技术要求。
伺服系统;天线转台;风载;PC104
引 言
某雷达的天线阵面为一3.3 m × 2.5 m平面天线,为了更好地搜索和跟踪目标,天线转台必须能在方位0°~360°做连续扫描,可以在±180°任意工作扇区内进行扇扫,可以控制天线在任意方位定位。因此,对伺服系统的控制精度、控制方式、可靠性及稳定性等提出了很高的要求。采用PC104模块作为系统的控制核心,通过CPU模块的串口接收监控系统送来的控制指令,通过并行总线采集R/D变换输出的13位方位码。天线控制指令经过软件运算处理后得出天线的位置误差和转速,输出不同频率的脉冲信号给伺服驱动器,控制天线按指定方式运行,并实时显示系统工作状态。本文介绍了基于高性能PC104嵌入计算机的天线转台伺服系统的实现方法。
1 设计要求
1)工作风速:<25 m/s;
2)天线在方位0°~360°做连续扫描,扫描速度0~6 r/min可选;
3)做±180°扇扫,工作扇区可任意指定,180°扫描时间≤10 s;
4)控制天线在任意方位定位,定位精度≤0.3°;
5)13位方位串行码及同步时钟脉冲;
6)天线控制指令、工作状态及故障信息可实时显示,并通过串口回馈给监控系统。
2 系统硬件设计
2.1 系统硬件构成
本系统采用模块化设计,系统硬件构成如图1所示。其中伺服控制板选用标准PC104模块作为主控单元,天线转台电机驱动器选用松下交流伺服驱动器。另外选用旋转变压器和轴角变换模块作为位置传感及检测元件,选用触摸显示屏作为状态显示和操作命令输入。

图1 系统硬件构成框图
2.2 伺服控制板
伺服控制板为系统控制中心,主要由瑞士数字逻辑公司的PCM-4335计算机模块和PCM-3610串口扩展模块组成。PC104具有模块化、体积小、功耗低、兼容性好等特点,可以缩短产品开发周期,提高产品可靠性。
2.3 转换接口板
转换接口板由R/D转换模块、逆变电源激磁模块等接口电路组成,在计算机软件控制下输出13位方位串行码及同步时钟脉冲,并输出控制警铃等命令。R/D转换模块选用CETC第43所生产的HRDC2114模块,将天线转台上旋转变压器输出的模拟角度信号进行变换,变成数字量绝对角度码,转换精度为0.07°。逆变电源激磁模块选用43所的MDAC15S07模块,产生旋转变压器工作所需的36 V 400 Hz激磁电压。
2.4 人机界面
人机界面的作用是显示系统的工作状态,同时提供触控操作,人机界面与计算机的接口为RS-422。人机界面选用台湾海泰克公司的PWS1711,其面板采用256色Color-STN配置,配有5.7″ LCD显示屏及类比式触控面板,此面板具有IP65防水防尘级设计,是一种适用于各种恶劣环境的高性能人机界面。
2.5 电机和伺服驱动器
根据电机功率的计算,选用日本松下公司的MHME302G1H交流伺服电机,功率为3 kW。与电机配套,交流伺服驱动器选用松下MINAS A5系列MFDHTA390驱动器,它接收伺服控制板和转换接口板送来的控制命令,控制电机运行。内部可选择7种控制模式,控制输入命令接口有3种:模拟电压输入、数字开关量输入、串行接口输入。驱动器的串行接口还可将驱动器的状态回送给伺服控制板,再送给监控系统和面板显示。
2.6 位置传感器
系统的精度主要与反馈装置的精度及计算精度有关,而与环内各环节关系较小[1]。根据系统设计要求,定位精度≤0.3°,因此选用青岛微电机厂0级精度的36XZ40-5旋转变压器作为位置传感器。
对本系统而言,旋转变压器精度为0.05°,R/D变换模块精度为0.07°,同步传动链精度为0.2°。由于在软件处理上当位置反馈值与给定值相差两个码时即认为到位,而本系统中天线转一圈共计16 384个脉冲码,因此软件计算精度为0.044°。计算得系统的定位精度(均方根值)e=0.22°≤0.3°。
3 主要技术
3.1 电机功率计算
天线工作时,有圆扫、扇扫、定位3种方式,扇扫及定位时电机工作负载最大,天线驱动电机运行时所受的阻力矩包括风阻力矩、起制动惯性力矩及摩擦力矩等,根据电机所受最大阻力矩可换算出电机的功率[2]。
3.1.1 天线风阻力矩计算
天线为平板结构形式,风载计算中气动参数选用风洞试验报告中的风阻力系数及风力矩系数[2]。
天线的静态风力矩:

旋转附加力矩:
方位风力矩:
(1)
式中:A为天线投影面积,8.25 m2;L为天线特征尺寸,3.3 m;n为天线转速,6 r/min;V为风速,25 m/s;ρ为空气密度,1.225 kg/m3;CM,Y为天线方位风力矩系数;CX为天线风阻力系数。
将天线在各个角度运行时所受的方位风力矩系数CM,Y及风阻力系数CX代入式(1),得到各角度的风阻力矩,再计算出其均方根值:
MW, RMS= 604.3 N·m
最大风阻力矩:
MWM= 1 197 N·m
天线转台传动比:
i= 420
最大风阻力矩折算至电机轴为
MLM=MWM/i= 2.85 N·m
3.1.2 天线起制动惯性力矩计算
天线的转动惯量:
式中:m为天线质量,2 318 kg;a为天线宽度,3.3 m;b为天线高度,2.5 m。因此JA= 2 538 kg·m2。
电机起制动时间均定为1s,从静止加速到2 500 r/min的角加速度[3]:

电机从2500r/min制动到静止的角加速度为-262 rad/s2。
电机的惯量JM= 0.003 8 kg·m2,电机起动时的惯性力矩:
3.1.3 天线运行所受摩擦力矩计算

式中:f为摩擦系数,0.01;G为天线重量,22 716.4 N;D为滚道中心距,0.776 m。因此MALF= 87.2 N·m。
摩擦力矩折算至电机轴为

电机运行规律及力矩如图2所示。根据惯性力矩MLI、摩擦力矩MLF、风阻力矩MLM,求得电机所受力矩的均方根[4]:

当t2和t5等于零时,天线相当于小角度扇扫,此时电机负载最大,其力矩均方根:
MM, RMS= 6.53 N·m

图2 电机运行规律及力矩
3.1.4 驱动电机选择
根据电机最大力矩均方根值可得电机功率[5]:
式中:ω为角速度,262rad/s;η为效率,0.85。因此P= 2.96~4.93 kW。
由于计算时考虑了最大负载,因此选择电机时,使用功率下限值,选用3 kW电机。
3.2 系统控制
系统工作模式分为转速模式和定位模式。当天线圆扫时,位置环开路,系统工作于转速模式,计算机输出数字量经D/A变换后加到伺服驱动器输入端,控制电机以给定转速运行。当天线扇扫时,系统先工作于转速模式,按软件设置的控制函数加速,稳速运行,减速,当接近扇扫角时接通位置环,到位后反向加速,稳速运行,减速,当接近扇扫角时接通位置环,完成一个扇扫周期。当天线工作于定位模式时,先工作于转速模式,按软件设置的控制函数加速,稳速运行,减速,当接近定位角时接通位置环。位置控制系统设计成II型系统,位置调节器使用PI控制[3]。如图3所示,图中各方框里的表达式为该环节的传递函数。

图3 系统控制框图
4 系统软件设计
系统以PC104为控制核心,结合相应的控制软件实现系统各种功能。采用MS-DOS 6.0操作系统,控制程序用C语言编制,直接面向系统硬件,具有运行速度快、易于控制等特点。本软件采用模块化设计,程序由主程序、初始化、警铃控制、命令接收、圆扫、扇扫、定位控制、方位采样、状态检测和串口通讯子程序等组成,程序流程图见图4。系统上电后执行该控制程序,主程序首先调用初始化子程序,完成各硬件、寄存器和控制参数的初始化,然后等待监控系统送来的控制指令,根据指令调用相应的子程序,驱动天线转台按照指定方式工作,完成后继续等待接收控制指令。
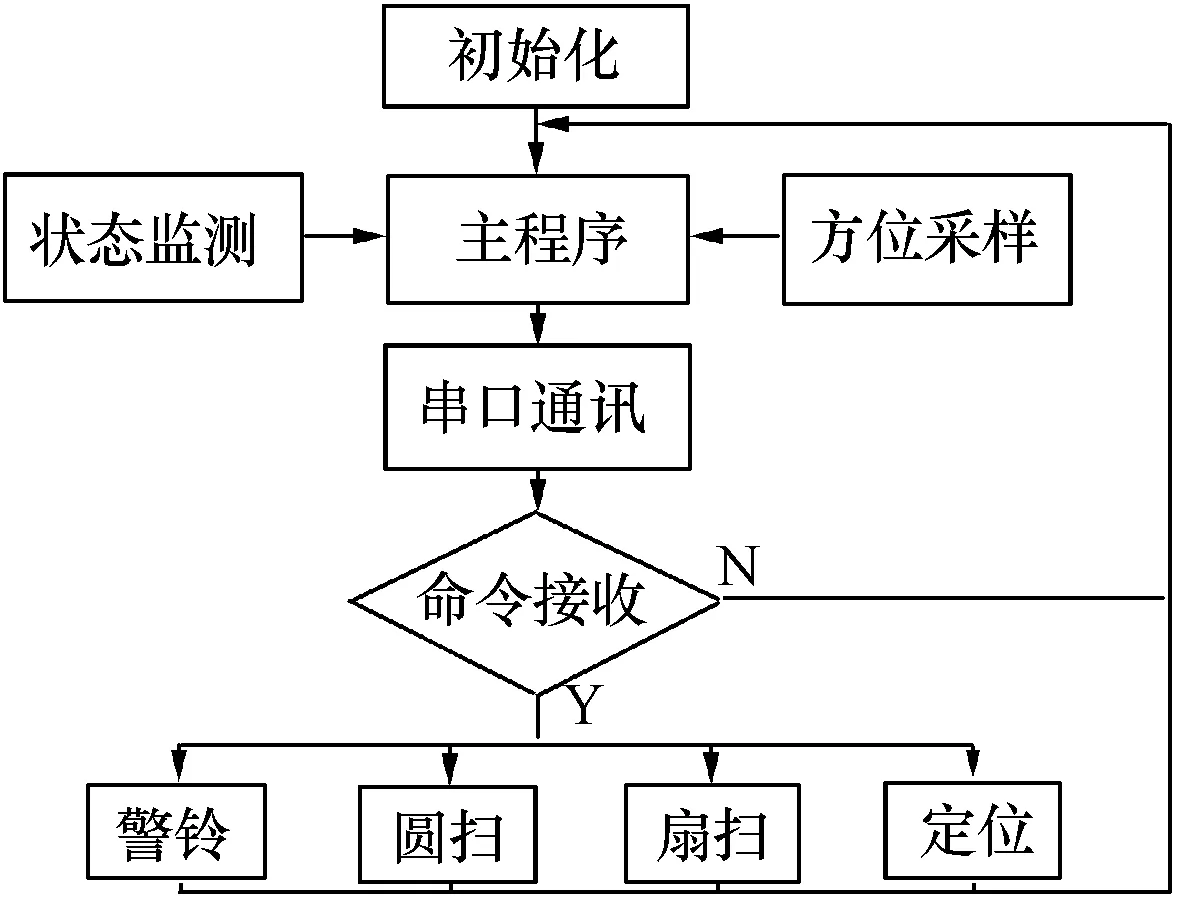
图4 系统程序流程图
5 结束语
本系统采用PC104计算机模块控制伺服电机系统,通过触摸屏和串口遥控操作实现天线转台的圆扫、扇扫、定位3种工作方式。设计时考虑了系统的安全性、可靠性、使用性和维修性,经过研制和调试,已经完成样机和多批次的生产。实践证明基于PC104的天线转台伺服系统设计,工作稳定、定位准确,完全满足设计要求。
[1] 熬荣庆. 伺服系统[M]. 北京: 航空工业出版社, 2006.
[2] 张国锋. 工程力学[M]. 兰州: 兰州大学出版社, 2009.
[3] 任彦硕. 自动控制系统[M]. 北京: 北京邮电大学出版社, 2007.
[4] 肖万选, 申余才. 雷达天线转台负载力矩的确定[J]. 电子机械工程, 2007, 23(3): 43-46.
[5] 叶尚辉. 天线结构设计[M]. 陕西: 西安电子科技大学, 1986.
徐 周(1980-),男,工程师,主要从事雷达伺服控制技术工作。
李建峰(1965-),男,高级工程师,主要从事雷达伺服控制技术工作。
Design of Antenna Turntable Servo System Based on PC104
XU Zhou,LI Jian-feng
(The38thResearchInstituteofCETC,Hefei230088,China)
To implement a stable and reliable antenna turntable servo system which functions circular scanning, fan scanning and positioning. In this paper, the design principle and software/hardware implementation method of a PC104 based servo system are introduced, the software are written using C language. The design of the system control mode and the calculation method for antenna array wind drag torque, inertia moment and friction torque are introduced in detail. On the basis of these designs, the calculation of driving element selection is discussed. Prototype and several actual operations show that the servo system is reasonably designed, is safe and reliable, can work stably, position accurately and meet all the technical requirements.
servo system; antenna turntable; wind load; PC104
2013-11-06
TN957.2
A
1008-5300(2014)01-0061-04
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
幼儿园(2021年12期)2021-11-06
电脑爱好者(2020年6期)2020-05-26
测控技术(2018年12期)2018-11-25
北京航空航天大学学报(2017年5期)2017-11-23
光学精密工程(2016年5期)2016-11-07
中国修辞(2016年0期)2016-03-20
北京航空航天大学学报(2016年4期)2016-02-27
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
