一种航空发动机传感器故障诊断方法*
2014-09-07 10:24:32张桂刚
传感技术学报 2014年10期
黄 强,王 健,张桂刚*
(1.中国科学院自动化研究所,北京 100190;2.北京科技大学自动化系,北京 100083)
一种航空发动机传感器故障诊断方法*
黄 强1,2,王 健1,张桂刚1*
(1.中国科学院自动化研究所,北京 100190;2.北京科技大学自动化系,北京 100083)
为了对航空发动机传感器故障作出准确快速的诊断,在Simulink中设计了基于卡尔曼滤波器的残差检验的故障诊断模块,实现发动机传感器恒偏差、恒增益、卡死故障等硬故障的诊断。针对传统卡尔曼滤波器残差检验法检测缓变故障时存在较大延时的缺点,采用改进卡尔曼滤波器的残差检验法来检测故障,并与传统卡尔曼滤波器法进行比较。仿真结果表明,传统卡尔曼滤波器的残差检验法能有效地诊断航空发动机传感器的几种典型硬故障,但对于缓变故障却不敏感。改进卡尔曼滤波器的残差检验法能在一定程度上加快检测速度,取得较好的效果。
测试计量技术及仪器;故障诊断;卡尔曼滤波器;残差检验;航空发动机传感器
随着全权限数字电子控制FADEC(Full Authority Digital Engine Control)系统的快速发展,人们对航空发动机的可靠性提出了更高的要求,因此,航空发动机上部署了各种各样的传感器以监测发动机的工作状况。大量发动机传感器都在强震动,高温,高压等恶劣的环境中工作,因此,业界越来越重视传感器故障的及时诊断与排除。
故障诊断的方法有很多种,但大致可分为两类:基于数据的故障诊断方法和基于模型的故障诊断方法。在基于数据的故障诊断方法中,故障诊断系统可以直接从各种各样的传感器得到表征系统运行状态的测量数据,并且对数据进行处理,从提取的特征数据中获得系统当前的健康状态,从而进行故障诊断,得出结果。常见的基于数据的故障诊断方法有模糊神经网络法[1]、径向基神经网络法[2]、相关向量机法[3]、支持向量机法[4]等等。在基于模型的故障诊断方法中,故障诊断系统并不像基于数据的故障诊断方法那样从传感器获取表征运行状态的数据,因为这时系统的模型是已知的,并且系统模型已经确定了系统的状态、参数和输入/输出等之间的关系,从而可以通过模型分析、变化监测、滤波器、观测器以及分类与推理的方法来实现系统的故障诊断功能。常见的基于模型的故障诊断方法有:观测器法[5]、等价空间法[6]、故障树分析法[7]、因果图分析法[8]、卡尔曼滤波器法[9]等等。
采用卡尔曼滤波方法来实现航空发动机传感器的故障诊断是目前比较成熟的做法,因此,本文采用卡尔曼滤波器法来诊断传感器故障。
1 故障模式分析
航空发动机传感器有恒偏差故障,恒增益故障,卡死故障,漂移故障,短路故障,冲激故障,周期性干扰故障等硬故障,本文选用恒偏差,恒增益,卡死这3种常见硬故障[10]。传感器在运行过程中,随着运行时间的增长,会出现性能退化,这就是传感器的软故障。
(1)恒增益故障
当系统运行到某一时刻t1发生恒增益故障,在之后的时间里yout=α·yin,得
(1)
(2)恒偏差故障
当系统运行到某一时刻t1发生恒偏差故障,在之后的时间里yout=yin+Δ,得
(2)
(3)卡死故障
当系统的输出为β时发生卡死故障,在之后的时间里yi=β,得
(3)
(4)软故障(性能下降)
当系统运行到某一时刻t1发生软故障,得
(4)
2 卡尔曼滤波器介绍

2.1 基于卡尔曼滤波器的残差生产方法
假设系统如下:

(5)
式中ω(k)是估计噪声,v(k)是测量噪声。
根据式(5),可以得到卡尔曼滤波器法的残差生成原理图,如图1所示:

图1 卡尔曼滤波器法残差生成原理图
所以计算残差的过程为:

(6)


(7)

(3)计算预报误差方差阵P(k|k-1);
P(k|k-1)=φ(k-1)P(k-1)φT(k-1)
+Γ(k-1)R(k-1)ΓT(k-1)
(8)
式中P(0)=Var[x(0)],为对角矩阵。
(4)计算滤波增益矩阵K(k);
K(k)=P(k|k-1)HT(k)
·[H(k)·P(k|k-1)HT(k)+R(k)]-1
(9)
(5)计算滤波方差矩阵P(k);
P(k)=[I-K(k)H(k)]P(k|k-1)
(10)


(11)
重复上面的过程就可以进行实时状态估计,并且可以得出下面用于故障诊断的残差r(k)。
2.2 基于卡尔曼滤波器的故障诊断策略
当系统出于正常状态时,卡尔曼滤波器产生的残差r(k)近似为高斯白噪声,平均值近似为0,但在故障状态时,r(k)会明显增大,这样就可以判断故障。
本文采取WSSR(Weighted Sum-Squared Residual)检测方法[10],该方法如下:
(12)
式中,N是人为选择的数据窗口长度。N取得较大时能降低故障的误报率,但同时也减慢了故障的检测速度,因此需要均衡考虑故障的准确率和快速性来选择N。
因此可以把故障检测器表示为
Lk+1≤M
(13)
式中M是人为选择的阈值。因此可以取Lk+1大于某一门限M的概率为α,即:p{LK+1>M}=α,其中α为允许的虚警概率。此时检测过程为:
(1)Lk+1>M系统异常
(2)Lk+1≤M系统正常
门限M的选择要兼顾虚警概率α和遗漏概率β两个因素。其中,虚警概率α为实际系统故障而判为故障的概率;遗漏概率β为实际系统故障而判为无故障的概率[11]。
3 卡尔曼滤波器故障诊断法的实现
对航空发动机传感器进行故障诊断之前,必须要建立发动机传感器模型(状态方程),得到仿真数据,再在某一时间点上加入故障,以便对其进行故障的检测。因此,首先要做的是用Simulink建立发动机传感器模型,这个模型是为了产生仿真数据,再在某一时间点人为注入故障。然后对待检测的数据进行卡尔曼滤波,与原输出相比较得到残差,最后进行残差分析,确定故障。
3.1 传统卡尔曼滤波器残差检验法故障诊断
3.1.1 仿真数据产生模块的实现
选取一个典型传感器的状态方程用来产生数据,分别在输入端和输出端加上两个独立的高斯白噪声。
传感器的状态方程如式(5)所示,其中:


3.1.2 卡尔曼滤波器及残差检验模块的实现
(1)卡尔曼滤波器的实现
卡尔曼滤波器算法根据式(6)~式(11),在Simulink中用S函数编写。
(2)残差检测模块的实现
根据前文叙述的残差检测(WSSR)方法。本文取N=3,因此得到残差检测模块如图2所示:
图2中Unit Delay是延时模块,产生0.001 s的延时,Math Function是矩阵转置模块,Product是乘法模块,Add是加法模块,将相乘后的结果相加。

图2 残差加权平方和计算模块图
图3中Relational Operator1是判断模块,判断残差加权平方和是否超过了阈值,Constant1中的0.5是阈值,Triggered Subsystem1模块的作用是当残差超过阈值时就输出该时间点的残差加权平方和及故障时间点,Display2显示残差加权平方和,Display3显示故障时间点。

图3 阈值鉴别及故障时间点显示模块图
3.1.3 故障诊断
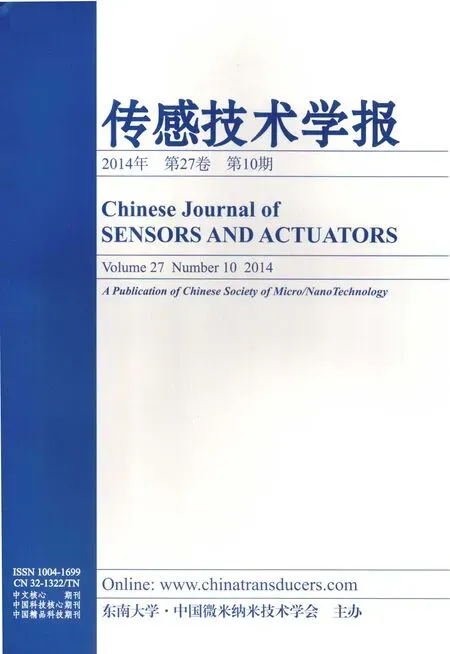
连接各个模块即可得到整个故障诊断系统模型图,如图4所示。
故障诊断计算流程图如图5所示。
在Simulink中分别设置恒增益故障,恒偏差故障,卡死故障,软故障,得到结果如下(残差加权平方和超过0.5时即可认为发生了故障)。
(1)恒增益故障
在5 s时加入故障,Simulink显示5.001 s时检测到故障,因此满足故障检测准确快速的要求。
(2)恒偏差故障
在5 s加入故障,Simulink显示5.001 s时检测到故障,因此满足故障检测准确快速的要求。
(3)卡死故障
Simulink显示在5.025 s时检测到故障,满足要求。
(4)软故障(性能下降)
在5 s加入故障,Simulink显示在5.224 s时检测到故障,但检测到故障却用了224个采样周期(本文设置采样周期为0.001 s),不满足故障检测的快速性要求。
从上面的实验结果可以看出,卡尔曼滤波器法对于诊断传感器恒增益,恒偏差,卡死等硬故障具有准确快速的特点,这满足了故障诊断的性能要求。可是面对性能退化这一软故障时,卡尔曼滤波器虽然能正确地判断出故障,但是延时了224个采样周期,这延时相对来说比较大,不满足系统故障诊断的快速性,因此,本文接着采用了一种改进的算法来诊断软故障。
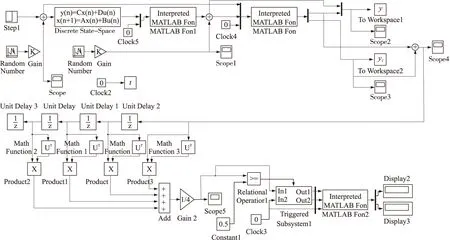
图4 故障诊断系统模型图
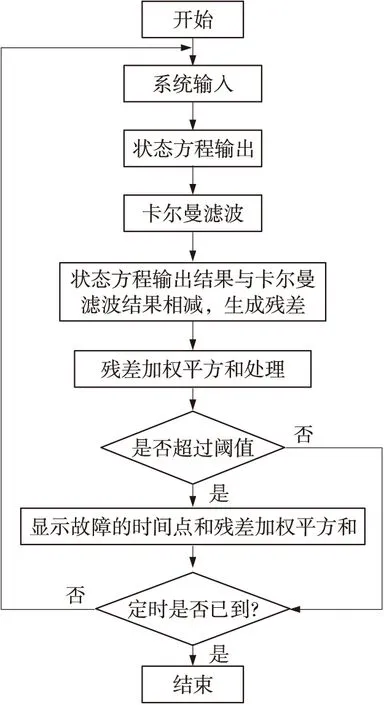
图5 故障诊断计算流程图
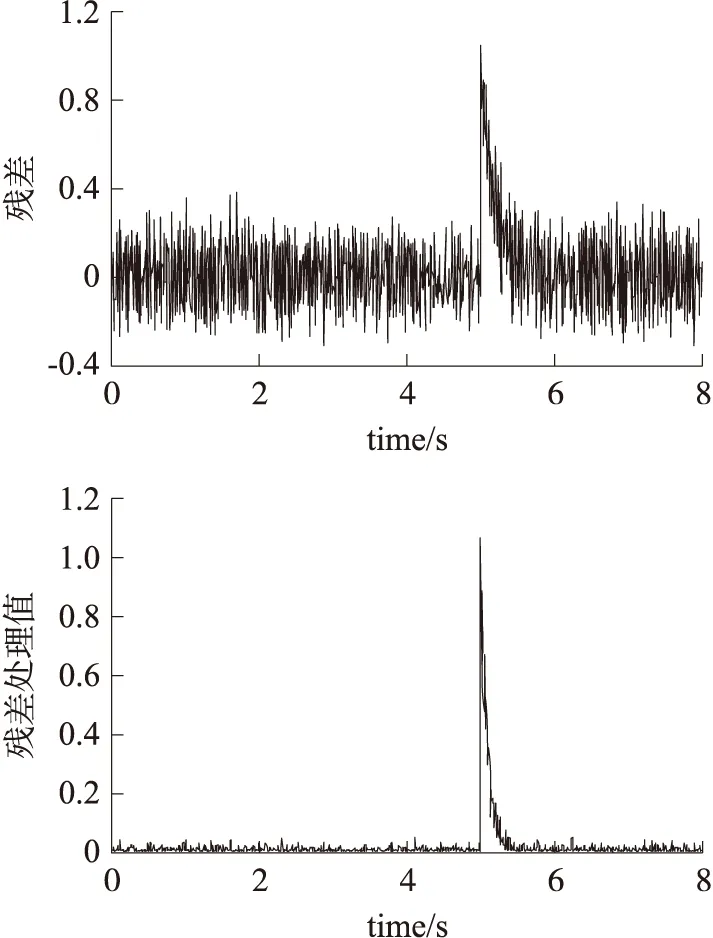
图6 恒增益故障残差曲线及加权平方和曲线图
3.2 改进卡尔曼滤波器残差检验法故障诊断
3.2.1 改进算法介绍


图7 恒偏差故障残差曲线及加权平方和曲线图

图8 卡死故障残差曲线及加权平方和曲线图
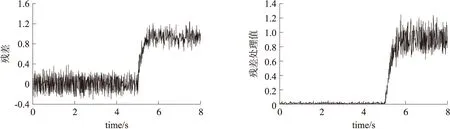
图9 软故障残差曲线及加权平方和曲线图


图10 软故障残差曲线及加权平方和曲线图
将k时刻的量测预报值改为:

(14)

则k时刻的残差为:
(15)
当无故障发生时,可以通过证明得rs(k)是零均值白噪声[11]。
只要n取的恰当,故障基本不会影响到量测预报值,因此判断传感器是否发生了软故障就可以通过检查残差来实现。

3.2.2 故障诊断
在Simulink设置软故障,得到结果如下(本文取n=200,5 s时加入故障)。
在5 s时加入故障,Simulink显示在5.15 s时检测的故障,虽然延时了150个采样周期,但是比未改进前检测速度加快了。
基于卡尔曼滤波器的故障检测方法对软故障的检测不敏感,导致故障积累到一定程度也不能及时检测出。基于改进的卡尔曼滤波器故障检测法检测速度明显比未改进前快,在一定程度上保证了故障检测的快速性。因此,对于检测传感器软故障,基于改进的卡尔曼滤波器故障检测法比未改进前更为有效。
4 结语
本文首先使用了传统卡尔曼滤波器的残差检验法来诊断航空发动机传感器的几种典型故障,对硬故障的诊断收到了很好的效果。针对传统卡尔曼滤波器的残差检验法诊断传感器软故障存在较大延时的缺点,本文使用了改进卡尔曼滤波器(基于移动伪正常状态)的卡尔曼滤波器法来诊断故障,检测速度明显加快。因此,本文所采取的算法有效、正确、可靠,这是对基于模型的PHM算法的一次有益的探索。
[1] 刘宜平,沈毅,刘志言. 一种基于模糊神经网络的故障分类器及其在多传感器故障诊断中的应用[J]. 传感技术学报,2000,13(1):38-43.
[2]房方,魏乐. 传感器故障的神经网络信息融合诊断方法[J]. 传感技术学报,2000,13(4):272-276.
[3]Tipping M E. Sparse Bayesian Learning and Relevance Vector Machine[J]. Journal of Machine Learing Research,2001,24(1):211-244.
[4]曾小军,黄宜坚. 基于AR模型和支持向量机的故障诊断法[J]. 机械科学与技术,2010,29(7):972-976.
[5]Patton R,Chen J. Observer-Based Fault Detection and Isolation:Robustness and Applications[J]. Control Engineering Practice,1997,5(5):671-682.
[6]Frank P. On-Line Fault Detection in Uncertain Nonlinear Systems Using Diagnostic Observer:A Survey[J]. International Journal of Systems Science,1994,25(12):2129-2154.
[7]许荣,车建国,杨作宾. 故障树分析法及其在系统可靠性分析中的应用[J]. 指挥控制与仿真,2010,32(1):112-115.
[8]Cheng H,Tikkala V M,Zakharov A,et al. Application of the Enhanced Dynamic Casual Digraph Method on a Three-Layer Board Machine[J]. IEEE Transaction on Control Systems Technology,2011,19(3):644-655.
[9]Mehra R K,Peschon J. An Innovations Approach to Fault Detection and Diagnosis in Dynamic System[J]. Automatica,1971,7(5):637-640.
[10]周永杰,王雨萌,张江滨. 基于卡尔曼滤波器的控制系统传感器故障诊断[J]. 电网与清洁能源,2011,27(7):50-53.
[11]张志鑫,张峰. 基于状态递推器的改进型残差χ2检测法[J]. 中国惯性技术学报,2009,17(1):107-110.
[12]许秀玲. 卡尔曼滤波器在传感器软故障诊断中的应用[J]. 计算机工程与应用,2010,46(11):230-232.

黄强(1991-),男,硕士研究生,主要研究方向为智能控制与计算智能,443810418@qq.com;

王健(1969-),男,中国科学院自动化研究所副研究员,硕士研究生导师,主要研究方向为智能计算与智能控制、飞机综合健康管理,jian.wang@ia.ac.cn;

张桂刚(1978-),男,博士,中国科学院自动化研究所副教授,硕士研究生导师,主要研究方向为大数据、大飞机综合健康管理,guigang.zhang@ia.ac.cn。
AKindofApproachforAero-EngineSensorFaultDiagnosis*
HUANGQiang1,2,WANGJian1,ZHANGGuigang1*
(1.Institute of Automation,Chinese Academy of Sciences,Beijing 100190,China;2.Department of Automation,University of Science and Technology Beijing,Beijing 100083,China)
In order to diagnose aero-engine sensors’ faults accurately and quickly,the engine sensors’ hard fault diagnosis of constant deviation,constant gain,stuck are achieved with the residual test fault diagnosis module based on Kalman filter. The module is designed in Simulink. There is a big delay in detection of soft fault with traditional residual test method based on Kalman filter,so the improved method is adopted to detect fault and compared with the traditional method. Simulation result show that the traditional residual test method based on Kalman filter can effectively diagnose several typical aero-engine sensors’ hard faults,but it is insensitive to soft fault detection. The improved method can accelerate the speed of detection and achieve a good performance.
Measuring and Testing Technologies and Instruments;fault diagnosis;Kalman filter;residual test;aero-engine sensor
项目来源:国家科技支撑计划重点项目(2015BAK25B04)
2014-06-04修改日期:2014-09-01
10.3969/j.issn.1004-1699.2014.10.003
TP212.6
:A
:1004-1699(2014)10-1315-06
猜你喜欢
中等数学(2019年1期)2019-05-20 09:45:18
中等数学(2018年7期)2018-11-10 03:28:58
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
中学数学研究(广东)(2017年2期)2017-03-28 03:49:50
新高考·高二数学(2016年3期)2016-05-20 23:49:33
电源技术(2016年9期)2016-02-27 09:05:39
西部广播电视(2015年17期)2016-01-18 03:46:21
电源技术(2015年1期)2015-08-22 11:16:28
电测与仪表(2015年24期)2015-04-09 12:04:32
中国医药指南(2014年23期)2014-05-25 02:27:38