
基于CEEMD的水下机器人MEMS陀螺降噪方法*
2014-09-06 10:48曾庆军鲁迎迎刘慧婷
传感技术学报 2014年12期
张 明,曾庆军,眭 翔,鲁迎迎,刘慧婷
(江苏科技大学电子信息学院,江苏 镇江 212003)
基于CEEMD的水下机器人MEMS陀螺降噪方法*
张 明,曾庆军*,眭 翔,鲁迎迎,刘慧婷
(江苏科技大学电子信息学院,江苏 镇江 212003)
MEMS陀螺仪工作时,容易受到各种噪声,尤其是高频噪声影响,不利于导航系统长时间工作,因此需要对数据实时去噪。互补集合经验模态分解(CEEMD)是一种按照自身尺度进行信号分解的算法,信号震荡随着分解级数逐渐减小,能够较好地分离高频和低频信号。以水下机器人MEMS陀螺仪为研究对象,根据水下实测数据,采用CEEMD分解陀螺信号,提取有效信息,并利用Allan方差验证CEEMD的有效性。仿真结果表明CEEMD对随机噪声、高频信号具有良好的降噪效果。
MEMS;降噪;CEEMD;Allan方差
在惯性导航中,微机电系统MEMS(Micro-Electro-Mechanical System)已经屡见不鲜。MEMS惯性器件由于体积小、集成度高、成本低等优点日益受到人们的欢迎,应用领域越来越广,是惯性导航领域发展的主要方向之一[1]。微惯性基本器件包括加速度计和陀螺仪,是微惯性导航系统的主要组成部分。在实际应用中,加速度计和陀螺仪因自身特性和外界干扰等,其测量精度受到零漂、非线性度、交叉灵敏度、温漂等噪声影响[2],不利于长期工作。因此,去除信号中的噪声至关重要。
互补集合经验模态分解CEEMD(Complementary Ensemble Empirical Mode Decomposition)是从经验模态分解(EMD)发展而来,能够部分克服EMD的模态混叠效应,更好地分离各个本征模态函数(IMF)的尺度[3];还避免了集合经验模态分解(EEMD)中由白噪声引起的分解误差,使原始信号通过IMFs重构得到准确重建,减少筛选次数,提高计算效率。因此,惯导数据经过CEEMD分解后得到一系列IMF函数,根据信号特性、噪声来源等可以人为地对IMFs处理得到新的、经过滤波的信号。为了对惯性器件误差项进行分析和识别,可以使用Allan方差对惯性器件测量数据进行处理。以MEMS陀螺仪为例,Allan方差辨识的误差主要包括量化噪声Q、角度随机游走N、零偏不稳定性B、角速率随机游走K和速率斜坡R[4]。
目前,已有部分国内外学者对EEMD或CEEMD在降噪方面的应用作了初步研究。Jenitta等运用CEEMD去除心电图噪声,其仿真结果表明该算法的有效性;文献[5]把EEMD运用在高压放电信号去噪中,实验和仿真结果表明其优于其他方法;文献[6]利用EEMD方法去除惯导动态数据中的噪声,获得优良的效果;文献[7]结合小波算法与CEEMD,分析其在地震数据中的应用,获得良好效果。
本文以自主研制的模态切换水下机器人MC-ROV(Model-Converted ROV)为载体,采集MEMS陀螺仪信号,利用CEEMD分解函数,对信号分解、重构,获得新的陀螺数据。利用Allan方差对分解前后的信号进行误差辨识、对比,验证CEEMD在MEMS陀螺仪中的降噪作用。
1 MEMS陀螺仪
MC-ROV是一种新颖的模块化、多功能、带缆遥控水下机器人,可以在浮游和爬行模态之间自由切换,并进行浮游勘察和爬行清污作业。其内部装载了InvenSense三轴硅微机械陀螺仪,该陀螺仪具有可编程低通滤波器,增强了温度稳定性,提高了滤除低频噪声性能。
图1为水下机器人本体及陀螺仪功能模块。
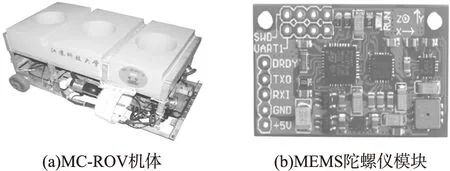
图1 MC-ROV与陀螺仪
该陀螺仪可以实时采集MC-ROV三轴角速度,通过模数转换后传输至水面控制平台并存储起来,以便进行分析和处理。
2 CEEMD去噪方法
CEEMD是在EEMD的基础上加入正负对形式的辅助噪声,这样就很好地消除重构信号中的残余辅助噪声,同时可以减小添加的噪声集合次数,减低计算成本。它不仅可以压制非平稳随机信号的噪声,而且能够尽量减少有效信号的损失,保持原信号特性[8]。
EMD是将非平稳信号分解为一系列的本征固有函数IMFs,其振荡随着分解级数逐渐减小[9],特征尺度由小到大。设原数据长度为n,CEEMD以EMD分解为基础,算法步骤如下[10-12]:
①对原始信号x[n]添加I次白噪声wi[n](i=1,…,I),白噪声以正负对的形式加入,得到2I个信号。
(1)
(2)
第1个余量为
r1[n]=x[n]-IMF1[n]
(3)


(4)
式中,系数ξk表示信噪比,这里取常数,Ej(·)是EMD分解的第j个函数。
经过一系列运算后,得到一组IMF函数。该方法能够根据各分解层的频谱分布提取有用信号,有效地消除高频随机噪声。
3 Allan方差原理
设以采样时间τ0对某惯性器件进行采样,共采了N个点,把这些数据分成K组,有K=N/M,每组包含M(M≤(N-1)/2)个采样点,如图2所示[13]。

图2 数据分组
每组持续时间τM=Mτ0称为相关时间,每组平均值计算如下
(5)
Allan方差定义为

(6)
式中,〈 〉表示总体平均。
MEMS陀螺仪主要随机误差包括量化噪声Q、角度随机游走N、零偏不稳定性B、角速率随机游走K和速率斜坡R[14]。随机误差源于Allan方差的关系见表1。在认为各部分噪声相互独立时,存在以下关系[15]

(7)
根据表1,可知式(7)可以写为

(8)
由于Allan方差数值一般较小,本文对陀螺仪数据采用最小二乘拟合时,以式(9)近似
(9)

表1 随机误差与Allan方差
4 仿真试验
对水下机器人MEMS三轴陀螺仪采集的数据,去除首尾部分数据,取7500组进行分析。分别对每一轴数据按照前文所述步骤进行CEEMD分解、重构,并计算其去噪前后的Allan方差。其中,CEEMD中白噪声标准差为0.2,添加次数为20。
①陀螺仪x轴
CEEMD对x轴数据分解如图3所示。
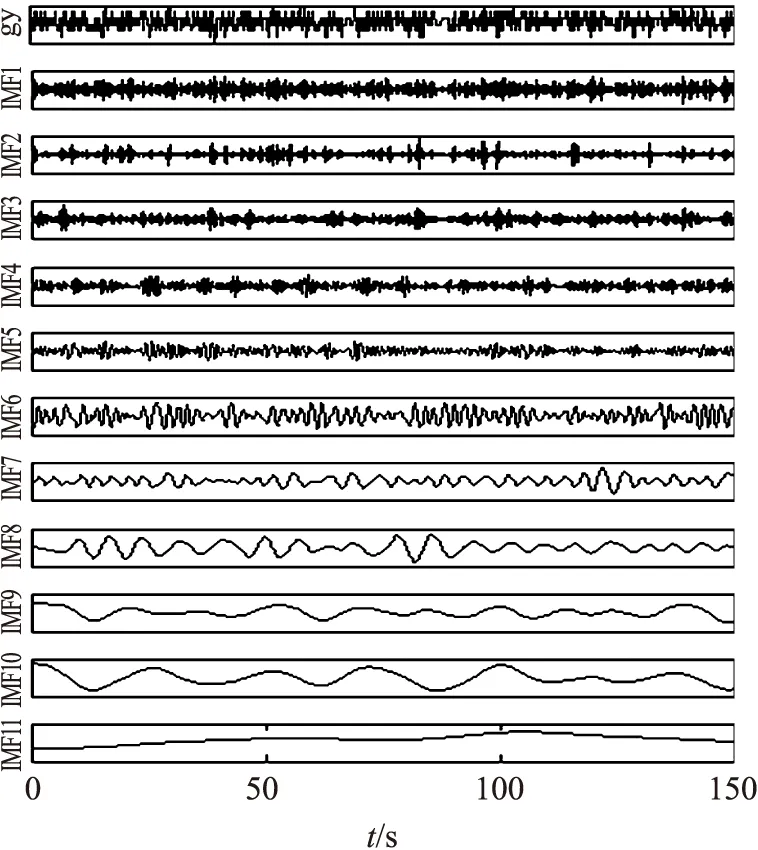
图3 x轴CEEMD分解
图中,gx为原始数据,包含各个噪声项,IMF1~IMF11是经过CEEMD分解后的各个本征固有函数。去除前6组IMFs,得到新的角加速度值,记为gx′。
运用Allan方差对gx、gx′数据进行检验,结果如图4~图5所示。
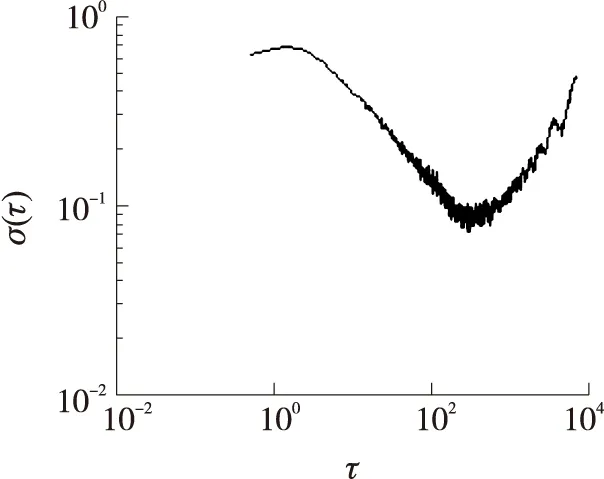
图4 gx的Allan双对数曲线
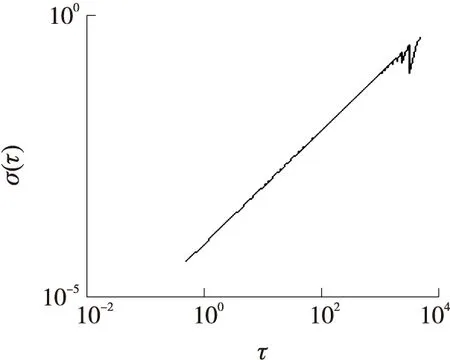
图5 gx′的Allan双对数曲线
Allan方差计算结果如表2所示。
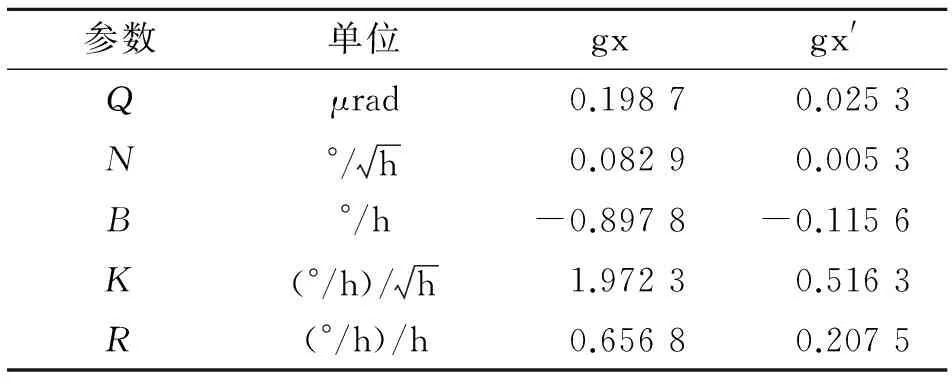
表2 Allan随机误差
②陀螺仪y轴
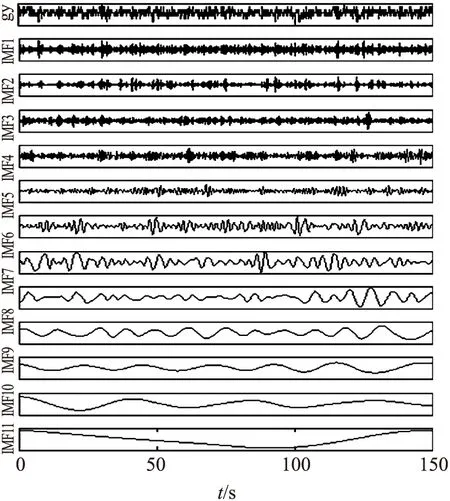
图6 y轴CEEMD分解
CEEMD对y轴数据分解如图6所示。
图6中,gy为原始数据,包含各个噪声项,IMF1~IMF11是经过CEEMD分解后的各个本征固有函数。去除前6组IMFs,得到新的角加速度值,记为gy′。
运用Allan方差对gy、gy′数据进行检验,结果如图7~图8所示。
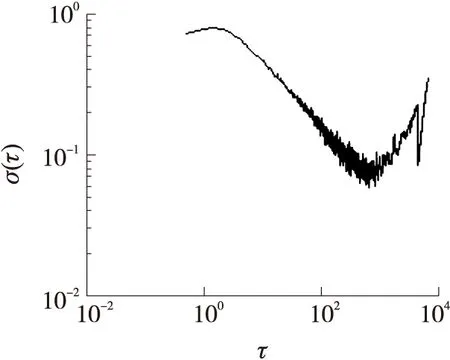
图7 gy的Allan双对数曲线
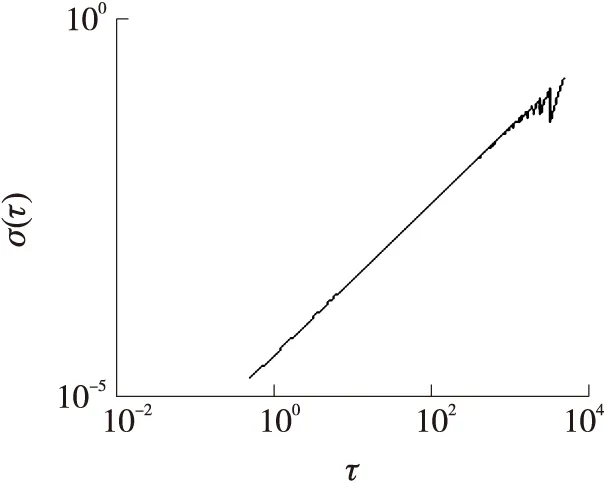
图8 gy′的Allan双对数曲线
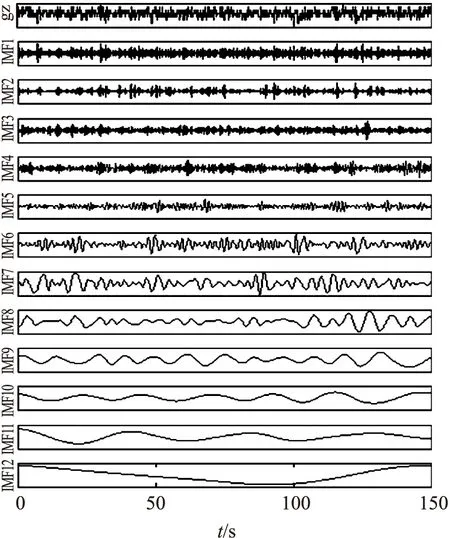
图9 z轴CEEMD分解
Allan方差计算结果如表3所示。
③陀螺仪z轴
CEEMD对z轴数据分解如图9所示。
图9中,gz为原始数据,包含各个噪声项,IMF1~IMF12是经过CEEMD分解后的各个本征固有函数。去除前7组IMFs,得到新的角加速度值,记为gz′。
运用Allan方差对gz、gz′数据进行检验,结果如图10~图11所示。
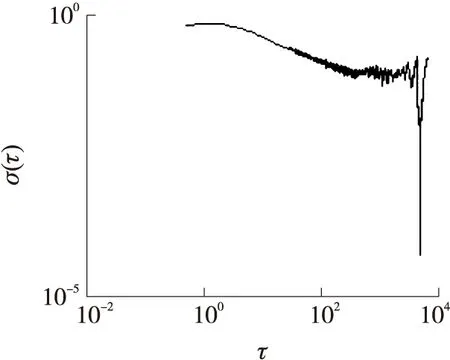
图10 gz的Allan双对数曲线
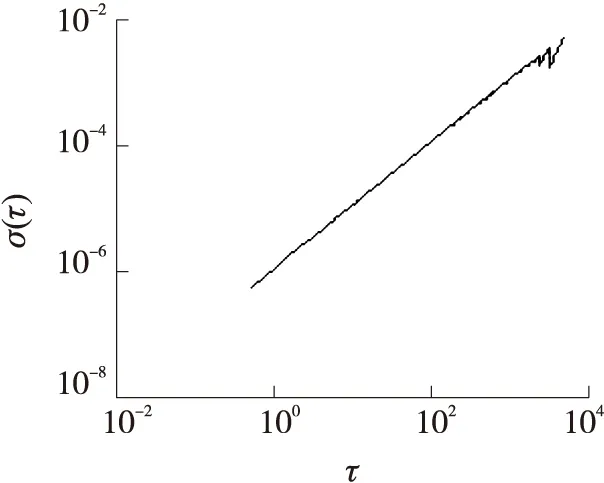
图11 gz′的Allan双对数曲线
Allan方差计算结果如表4所示。
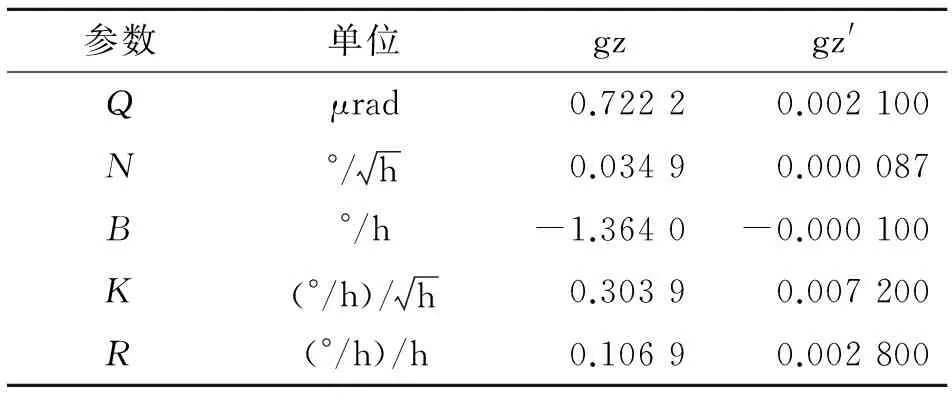
表4 Allan随机误差
根据Allan方差图表结果,可知影响陀螺仪测量精度的主要因素有量化噪声和角速率随机游走。此外,速率斜坡也在一定程度上影响陀螺仪精度,可能是受加速度交叉耦合影响。对比三轴陀螺数据的Allan双对数曲线,可以看到最大的变化在于零偏不稳定性基本消除,说明CEEMD可以有效去除零偏不稳定性等误差带来的不利影响。
分析、对比表2~表4方差数据,可以看出该陀螺仪量化噪声Q、角度随机游走N、角速率随机游走K和速率斜坡R在对进行CEEMD分解重构后,降低了几倍甚至几十倍,去噪效果明显。这里,Allan误差中出现了负数,表明对这些参数未能准确辨别出来,还需要更大量的数据多次分析。
4 结论
CEEMD是近年来新出现的一种信号分解方法,通过加入一定数量的正负对辅助噪声较好地解决了EMD和EEMD的模态混叠效应。运用CEEMD对MEMS陀螺仪数据进行处理,得到若干不同尺度的IMFs。由于陀螺仪噪声大部分处在高频段,且尺度较小,其低频段噪声较微弱,所以本文主要去除高频段IMFs,保留低频部分,得到新的陀螺仪数据。从Allan分析结果可以看到,CEEMD去噪后误差大幅减小并保留原信号有效信息。
[1] 周红进,钟云海,易成涛. MEMS惯性导航传感器[J]. 舰船科学技术,2014(1):115-121.
[2]王翔宇. 基于MEMS惯性器件的分布式导航系统研究[D]. 上海:上海交通大学,2013.
[3]Jenitta J,Rajeswari A. Denoising of ECG Signal Based on Improved Adaptive Filter with EMD and EEMD[C]//Information and Communication Technologies(ICT),2013 IEEE Conference on. IEEE,2013:957-962.
[4]宋海宾,杨平,徐立波. MEMS传感器随机误差分析及处理[J]. 传感技术学报,2013,26(12):1719-1723.
[5]Chan J C,Ma H,Saha T K,et al. Self-Adaptive Partial Discharge Signal De-Noising Based on Ensemble Empirical Mode Decomposition and Automatic Morphological Thresholding[J]. Ieee Transactions on Dielectrics and Electrical Insulation,2014,21(1):294-303.
[6]张淑英,曹咏弘. EEMD在惯性导航动态测试中的去噪应用[J]. 测试技术学报,2013,27(5):419-424.
[7]王姣,李振春,王德营. 基于CEEMD的地震数据小波阈值去噪方法研究[J]. 石油物探,2014,53(2):164-172.
[8]宋海宾,杨平,徐立波. MEMS传感器随机误差分析及处理[J]. 传感技术学报,2013,26(12):1719-1723.
[9]宋国锋,董小刚,秦喜文. EMD方法在高频数据去噪中的应用[J]. 长春工业大学学报(自然科学版),2013,34(6):601-605.
[10]Sweeney K T,McLoone S F,Ward T E. The Use of Ensemble Empirical Mode Decomposition with Canonical Correlation Analysis as a Novel Artifact Removal Technique[J]. Biomedical Engineering,IEEE Transactions on,2013,60(1):97-105.
[11]Yeh J R,Shieh J S,Huang N E. Complementary Ensemble Empirical Mode Decomposition:A Novel Noise Enhanced Data Analysis Method[J]. Advances in Adaptive Data Analysis,2010,2(2):135-156.
[12]Torres M E,Colominas M A,Schlotthauer G,et al. A Complete Ensemble Empirical Mode Decomposition with Adaptive Noise[C]//Acoustics,Speech and Signal Processing(ICASSP),2011 IEEE International Conference on IEEE. 2011:4144-4147.
[13]赵思浩,陆明泉,冯振明. MEMS惯性器件误差系数的Allan方差分析方法[J]. 中国科学:物理学,力学,天文学,2010(5):672-675.
[14]陈旭光,杨平,陈意. MEMS陀螺仪零位误差分析与处理[J]. 传感技术学报,2012,25(5):628-632.
[15]邹学锋,卢新艳. 基于Allan方差的MEMS陀螺仪性能评价方法[J]. 微纳电子技术,2010,47(8):490-493.
张明(1988-),男,江苏科技大学硕士研究生,研究方向为智能电气与系统、水下机器人导航与定位,zhangruohuang@163.com;

曾庆军(1969-),男,江苏科技大学教授,主要研究方向有先进控制理论与应用、现代测控与智能系统,zheng28501@163.com。
DenoisingMethodofMEMSGyroofanUnderwaterVehicleBasedonCEEMD*
ZHANGMing,ZENGQingjun*,SUIXiang,LUYingying,LIUHuiting
(School of Electronic and Information,Jiangsu University of Science and Technology,Zhenjiang Jiangsu 212003,China)
MEMS-based gyroscope is vulnerable to many noises,especially high-frequency noises when executing underwater tasks,which is detrimental to a long-run system,requiring denoising data in real-time. Complementary Ensemble Empirical Mode Decomposition(CEEMD)is a novelty signal decomposition algorithm according to scales and sizes,and signal’s vibration gradually reduces with decomposition levels. And it can separate signals among different frequencies. Taking MEMS gyroscope of underwater vehicle as a research object,this paper applies CEEMD to decompose gyroscope signals acquired during experiments in order to extract effective information. Meanwhile,Allan Variance is utilized to verify the effectiveness of CEEMD. Simulation results demonstrate that CEEMD has a good filtering effect on random noise and high-frequency signals.
MEMS;denoising;CEEMD;Allan variance
项目来源:江苏省研究生实践创新计划项目(SJLX_0493)
2014-08-29修改日期:2014-10-30
TP202
:A
:1004-1699(2014)12-1622-05
10.3969/j.issn.1004-1699.2014.12.007
猜你喜欢
数学物理学报(2022年2期)2022-04-26
新世纪智能(数学备考)(2021年9期)2021-11-24
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
新世纪智能(数学备考)(2020年9期)2021-01-04
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中学生数理化·高一版(2018年10期)2018-11-08
百科探秘·航空航天(2017年9期)2017-12-31
初中生世界·九年级(2017年10期)2017-11-08
