
基于ARM和CPLD的无线风速仪设计*
2014-09-06 10:51张自嘉
电子器件 2014年6期
陆 健,张自嘉,2*
(1.南京信息工程大学信息与控制学院,南京 210044;2.南京信息工程大学气象灾害预报预警与评估协同创新中心,南京 210044)
基于ARM和CPLD的无线风速仪设计*
陆 健1,张自嘉1,2*
(1.南京信息工程大学信息与控制学院,南京 210044;2.南京信息工程大学气象灾害预报预警与评估协同创新中心,南京 210044)
分析了在平面三角形阵列中利用超声波时差法测量风速风向的基本原理,设计了基于ARM和CPLD微处理器的无线风速仪。给出了以LPC1768和EPM240T100C5芯片为核心的超声波无线风速仪的设计实现方法。重点阐述了超声波驱动电路、信号调理电路、无线收发模块以及系统软件的设计。实验结果表明,该系统可以精确测量风速与风向,且工作可靠稳定。
超声波测风;时差法;ZigBee;LPC1768;EPM240T100C5
风速仪在气象、民航、公路、桥梁、农业和新能源领域都发挥着重要的作用。超声波式风速仪正逐渐取代传统机械式风速仪成为风速仪发展的主流。目前,超声波式风速仪结构上多采用将两对收发一体的超声波换能器正交放置在同一水平面上构成测量阵列,当风沿换能器构成的正交方向上传播时,会引起湍流导致错误测量。采用有线方式进行数据传输的风速仪,其布线复杂、抗干扰性差及维护困难。同时现有的超声波风速仪电路结构较复杂、功耗较大且成本高。在分析了现有超声波风速仪缺点的基础上,本文提出并设计了一种基于ARM和CPLD的高精度、低成本的无线风速仪。
1 超声波风速仪测量原理
超声波测风技术是利用超声波信号在空气中传播时承载空气流动的信息来实现对风速风向测量。目前,超声波测量风速的方法大致可以分为时差法、频率差法、多普勒法、相关法等[1]。与其他方法相比,时差法测量原理简单,测量精度高,性能稳定,受外界环境因素影响小且电路易实现。目前超声波风速仪大多采用时差法实现对风速风向的测量。时差法测量风速风向原理如图1所示,两超声波换能器之间的距离固定,超声波在空气中传播时,由于受顺向和逆向影响,存在一定的时间差,通过获得该时间差就可以确定所测风的风速和风向值[2]。
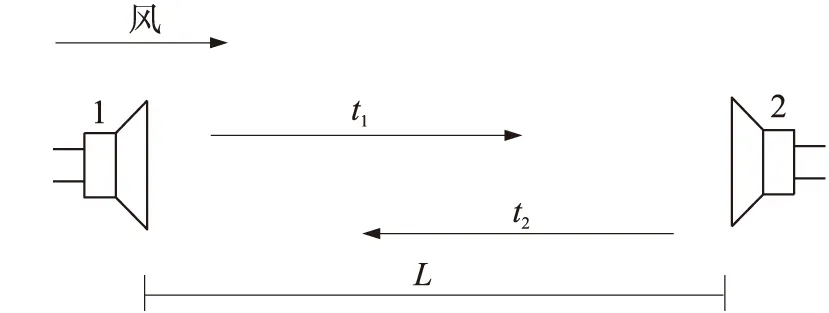
图1 时差法测量风速风向原理
设空气中的声速为C,风速为VS,两超声波换能器之间的距离为L。超声波在顺向和逆向情况下的传播的时间分别为t1和t2:
(1)
由式(1)可得:
(2)
根据式(2)可知,只需测得超声波在固定距离上顺向和逆向所传播的时间,就可以获得所测风的风速值。同时时差法测风可以消除温度等环境因素引起的声速变化而导致的测量错误。
2 系统总体设计
基于ARM和CPLD的无线风速仪的硬件结构如图2所示。系统主要包括以下模块:ARM主控制器模块、CPLD协处理器模块、超声波驱动电路模块、信号接收处理模块、ZigBee通信模块、上位机单元、存储模块以及超声波换能器阵列单元。

图2 风速仪硬件原理框图
为了保证和提高整个系统测量的精确性,选用Altera公司的CPLD芯片EPM240T100C5作为系统的协处理器,EPM240T100C5是Altera公司一款革命性的CPLD产品,性能稳定、低功耗、性价比高。系统通过CPLD处理器来实现对超声波渡越时间精确计时,同时CPLD处理器也接收主控制器ARM的信号,来驱动超声波换能器发射超声波信号,并对接收的超声波回波信号进行处理,CPLD最终将测得的数据送给主控制器ARM进行处理。系统选用NXP公司的32位微控制器LPC1768芯片作为系统的控制和运算核心,该芯片属于Cortex-M3系列具有强大的数据计算处理能力、低功耗且对外设支持能力强大。主控制器LPC1768主要完成向CPLD发送控制命令,处理计算CPLD获得的数据并将数据送至上位机。无线收发模块基于ZigBee技术[3],采用TI公司的ZigBee芯片CC2530,CC2530具有较高灵敏度、抗干扰能力强,在不加功率放大情况下,室外传输距离可达400 m,通过增加功率放大器可实现远距离数据传输。通过上位机软件发控制命令给协调器,与传感器节点建立连接,CC2530节点模块从ARM主控制器中获得风速风向数据,将数据发送给协调器,并通过协调器将数据送至上位机显示保存[4]。
2.1 超声波换能器系统设计
系统采用3个收发一体的超声波换能器构成平面三角阵列来实现对二维平面上风速风向的测量。超声波换能器阵列结构如图3所示,超声波探头之间保持60度的偏离角,构成等边三角形阵列,形成3个矢量测量基准。根据换能器阵列结构的设计,选用的超声波换能器应具有高的灵敏度,并具有一定的开角,本设计中采用型号为DYA-125-02A收发一体式的超声波换能器,其工作中心频率为125 kHz,工作电压为120 V,半功率角为13°,锐度角为35°。阵列中各超声波探头之间距离保持25 cm。超声波换能器按次序发射一定频率的超声波信号并测量其顺向和逆向传播的时间,通过计算可以得到所测风的风速和风向值。该结构可以消除当风向与超声波收发方向路径一致时引起的湍流,提高测量精确度,同时该结构电路实现更加简单,装置主体更趋向于小型化。
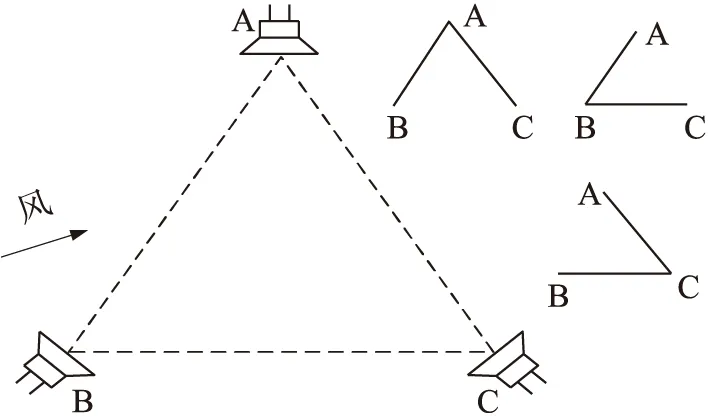
图3 超声波换能器阵列结构图
如图3所示的超声波换能器阵列,当风向与任意两换能器连线方向一致时,会引起湍流,此时可采用其他2种测量基准,保证测量结果的准确性。假设如图3所示,风速为V,其在AB和BC路径上的风速分量为V1和V2,风与BC方向上的夹角为a度,测得A、B组超声波换能器轮流发送超声波信号时顺向和逆向时间为t1和t2,测得B、C组超声波换能器顺向和逆向时间为t3和t4,风速测量原理如图4所示。

图4 风速系统测量原理
风速仪在室外安装时,使超声波换能器A指向正北方向。根据式(2)可以得到风在AB、BC方向上的风速风量V1和V2,根据矢量合成原理,可以得到风速值和风向值:
(3)
(4)
2.2 系统硬件设计
2.2.1 超声波驱动电路模块设计
系统中ARM处理器主要用于发送控制命令、数据运算及与CC2530模块通信将数据送出[5]。CPLD处理器接收ARM控制命令执行超声波信号发送、接收及渡越时间测量。图5为超声波驱动单元电路原理图。
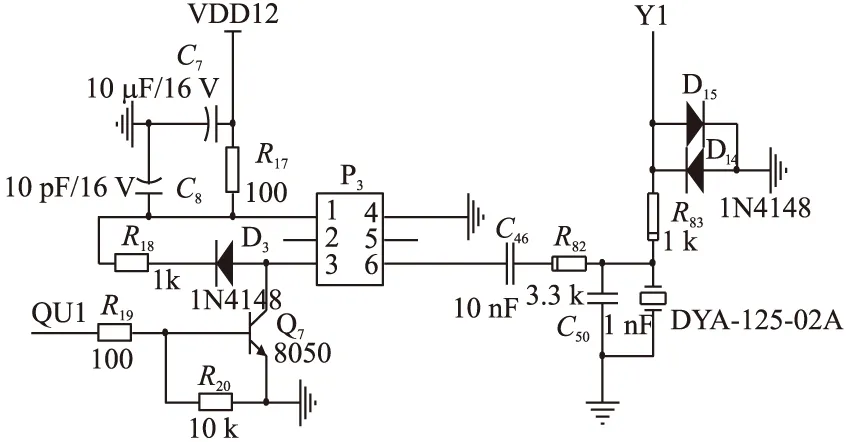
图5 超声波驱动单元电路原理图
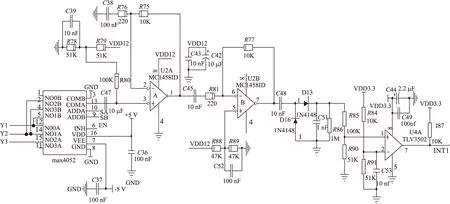
图7 超声波信号调理电路
设计中采用单端正激式脉冲变压器P3构成升压电路来驱动超声波换能器发送超声波信号,确保在变压器原边的开关三极管导通时,变压器副边同时对负载供电,同时为了防止在开关三极管断开时,处于“空载”状态的变压器其中存储的磁能使电感器饱和而烧毁开关器件,设计中通过二极管1N4148,D3和电阻构成磁通复位电路来释放多余的磁能。本设计中脉冲变压器的匝数比为1/15,可将原边的低压方波脉冲升至120 V左右,从而驱动超声波换能器发出超声波信号。实际测试中,CPLD从Q3端至少需要产生15个频率为125 kHz的方波脉冲信号才可驱动超声波换能器发出超声波信号。为了保护Y1后续信号调理电路,采用两个1N4148构成钳位保护电路,防止脉冲高压驱动超声波换能器时损坏后续电路。图6为超声波换能器接收端实测波形示波器图像,回波波形与理论接收信号一致,信号干扰较小,便于信号调理电路进行后续处理。
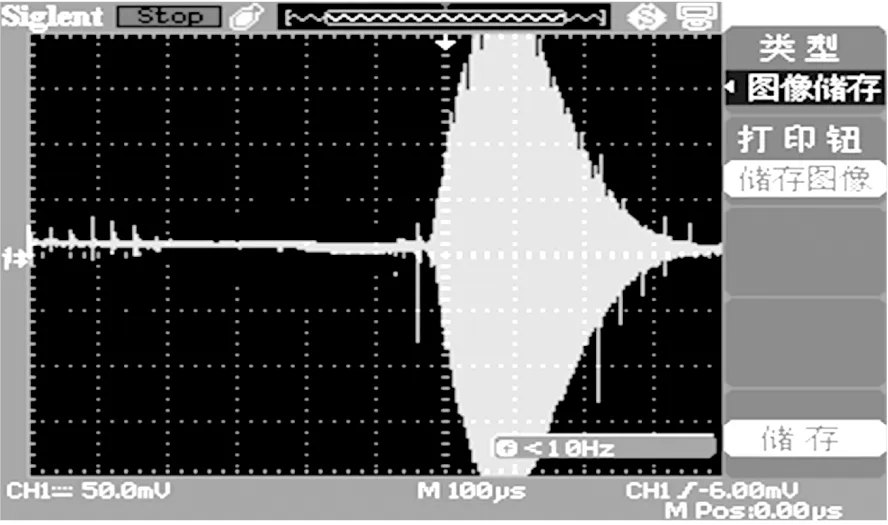
图6 超声波接收信号
2.2.2 超声波信号调理电路设计
时差法测量回波渡越时间的方法主要有包络检波法、阈值比较法和波形匹配法[6]。采用阈值比较法的电路实现比较简单,但受风速等环境因素影响,超声波在传播过程中其幅值会发生变化,导致测量精度降低。波形匹配法需预先采集大量标准波,将接收端信号与标准波进行比对,实现电路复杂,且标准波采样难度大。本设计中采用包络检波法来实现对回波渡越时间的测量,传播过程中信号幅值会发生变化,但接收端回波具有很好的一致性,其首波点与回波包络峰值的之间周期数是确定的,通过测定回波信号包络峰值点到达时的时间,就可以得到超声波的渡越时间。超声波信号调理电路如图7所示。
设计中采用一片MAX4052多路复用器来简化整个超声波信号调理电路设计的复杂度,降低PCB制板难度,消除了单独采用多路信号调理电路时所带来的电磁干扰,提高了系统的稳定性和测量精度。超声波换能器接收端回波信号电压等级一般在毫伏级,为了满足后续电路输入要求,需要对回波信号进行放大并提高信号信噪比,放大电路设计应尽可能选用低噪声运放,减少放大器级数,前级的增益带宽应尽量的大。因此,系统使用两片MC1458构成放大电路实现两级放大,该放大电路对接收端回波信号放大倍数在2 000倍左右,放大后输出电压能满足后续电路的输入要求。信号经放大处理送入包络检波电路,获得平滑的包络信号,将环境因素对回波信号幅值的影响降到最低,提高测量精度。设计中采用超高速高精度TLV3502芯片构成电压比较电路,比较器电路的基准电压为2.2 V,包络信号经比较器电路获得数字方波信号,在方波信号下降沿触发CPLD获得渡越时间。
2.2.3 计时单元及CC2530模块
超声波渡越时间的测量直接影响风速仪测量结果的精度,因此系统必须具有高精度的计时单元和高速处理的速度。利用CPLD的可并行执行的特性[7-8],可使CPLD在驱动超声波传感器同时启动内部计时单元,与其他处理器仅能按顺序流程执行相比,消除了代码运行所导致的计时误差。同时并发执行可提高信号处理速度满足实时性要求。本设计中CPLD控制器外接100 MHz晶振,其内部计时单元的分辨率达到10 ns,使系统测量的结果更加精确。
无线收发单元采用TI公司以C51为内核的ZigBee芯片CC2530,其具有两个支持多种串行通信协议的USART,可与主控制器采用串口通信,同时CC2530具有多种不同的运行模式,可在不同运行模式之间切换来进一步确保整个系统的低能源消耗。本设计中LPC1768与CC2530采用串口通信,其连接电路如图8所示。LPC1768的串行数据输入端RXD0与CC2530的串行数据输出端P0_3相连,CC2530的串行数据输入端P0_2与LPC1768的数据输出端TXD0相连。该处CC2530的设备类型设置为传感器节点,而上位机部分的CC2530设备类型设置为协调器,实现无线接收各测量节点的数据,并送至上位机处理。
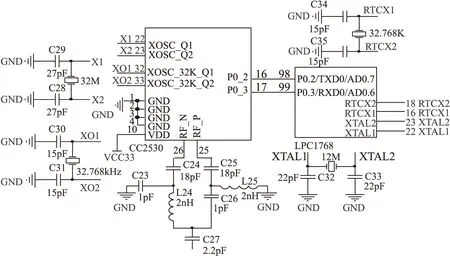
图8 CC2530与LPC1768连接原理图
2.3 系统软件设计
风速仪的软件设计主要包括LPC1768、EPM240T100C5以及CC2530收发部分软件设计。LPC1768的软件设计主要包括初始化程序、测量控制子程序、ARM与CPLD数据传输子程序、SD存储子程序、串口通信子程序这5部分。EPM240T100C5的软件设计主要包括:初始化程序、计时子程序、超声波发送子程序、CPLD与ARM数据传输子程序。LPC1768编程调试环境为MDK-ARM,采用C语言开发,EPM240T100C5编程调试环境为Quartus Ⅱ 8.1,采用Verilog语言开发,调试过程采用Modelsim进行仿真。图9所示为风速仪测量一路数据时程序流程图。
3 测量结果及分析
本文所设计的基于ARM和CPLD的无线风速仪的上位机软件部分采用Visual Studio 2010开发。上位机软件通过串口发送命令至协调器,由协调器将选中的风速仪节点加入网络并接收节点数据,将数据送至上位机显示保存。测试过程中,风速仪与我校气象站风杯式风速仪放置于同一地点测量,并设定以10 min为时间间隔连续工作12 h进行测量,上位机采集数据如图10所示。
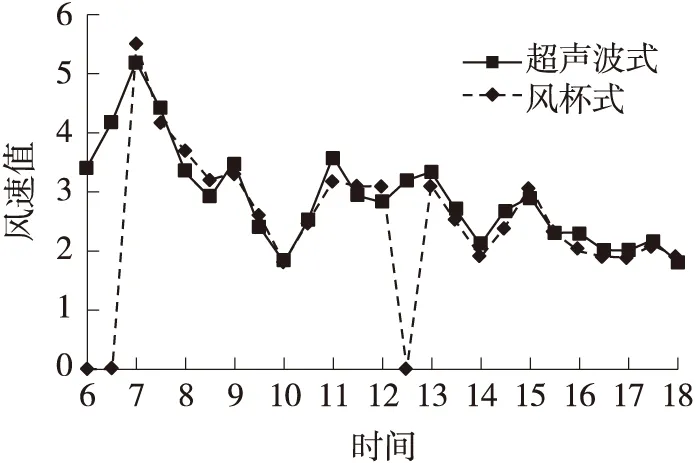
图11 数据对比结果图
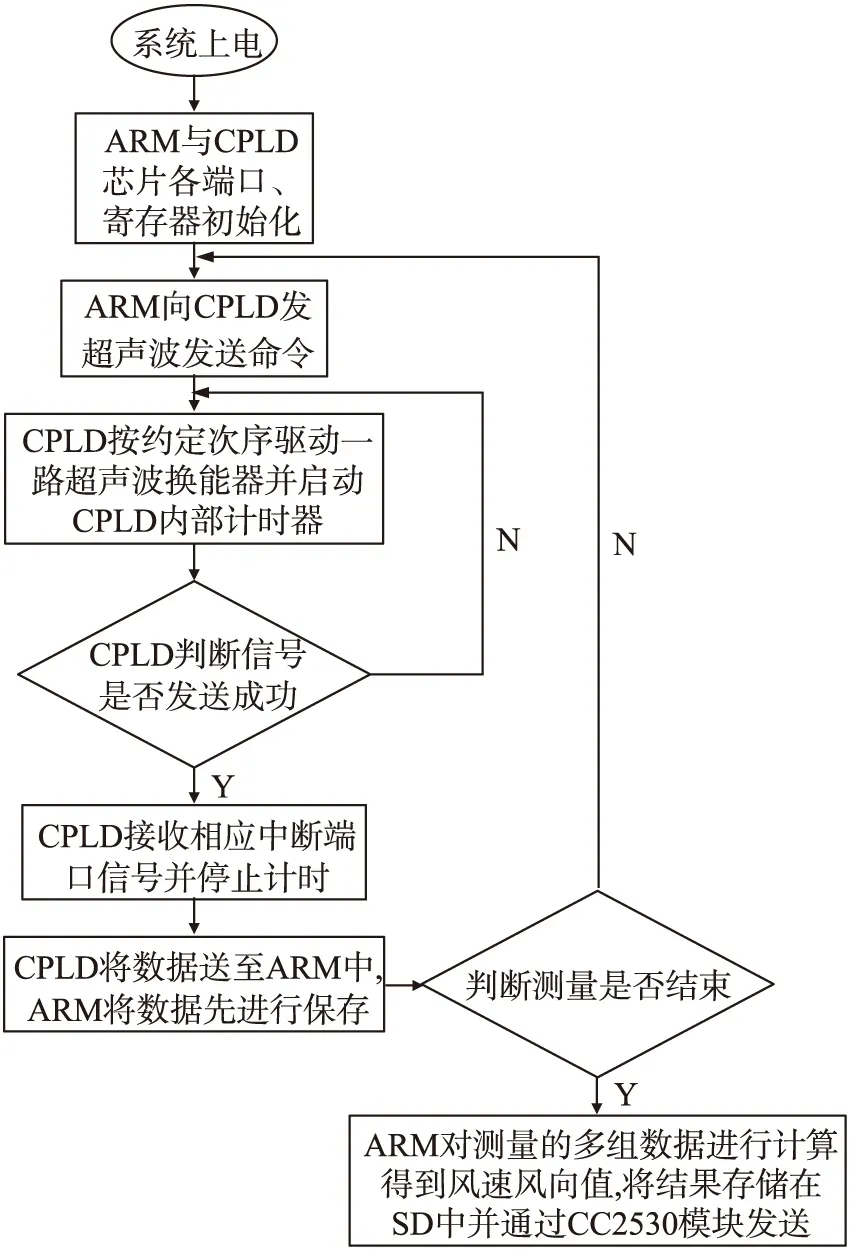
图9 超声波测量程序流程图
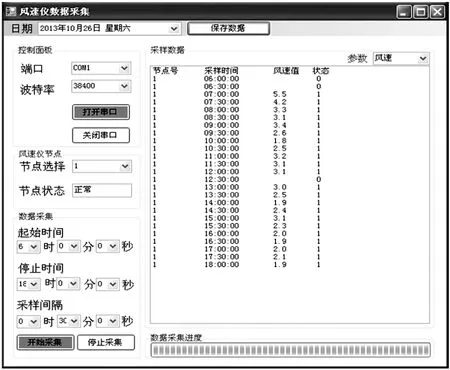
图10 上位机采集数据
为了检验系统测量的准确性,测量结果与同一地点的风杯式风速仪测量结果进行对比如图11所示。
与传统风杯式风速仪测量结果对比,系统测量具有一定误差,根据测量的原理和系统硬件设计,分析了其测量误差的主要来源。首先是超声波换能器阵列中每两组换能器之间的距离误差Δd引起的误差,3个超声波换能器均固定于各支架的顶端,支架的形变以及安装时各换能器之间的距离误差都会引起d的误差。本设计中每两个换能器之间距离d为25 cm,若Δd为5 mm则风速值的相对误差将达到2%,因此对于d的校准必须精确。其次是渡越时间误差Δt,超声波换能器在发送和接收超声波脉冲信号时存在延时效应,同时超声波驱动电路和信号调理电路也存在电路的延迟均会引起渡越时间t的误差。而通过相应的电路软件仿真和超声波换能器数据手册可获得电路的延迟时间和换能器延时时间,通过软件补偿可消除渡越时间误差。可见由系统各部分引起的测量误差,均属可控误差,满足系统测量要求,系统各单元设计安排具有合理性。
但从数据对比结果来看,系统所测得的数据还是比较准确,系统基本能够满足设计要求实现对风的测量,且在长时间工作状态下,性能稳定可靠。可能由于环境等因素影响导致无线收发模块出现数据丢包现象。但从总体测量结果上可以看到系统在可靠性和测量精度上均能达到较高的水平。
4 结论
本文基于时差法设计实现了一种基于ARM和CPLD的无线风速仪。阐述了系统工作的基本原理和硬件设计结构,重点介绍了系统部分硬件电路设计和系统软件设计,系统设计中充分考虑了成本和低功耗问题。测量结果表明:本测量系统能够实现对风的准确测量,并能够稳定地将数据通过无线模块发送至上位机处理,软硬件设计合理,设计成本低,解决了现有风速仪所面临的问题,具有一定的实际工程应用价值。
[1]Taro Nakai,Kou Shimoyama. Ultrasonic Anemometer Angle of Attack Errors Under Turbulent Conditions[J]. Agricultural and Forest Meteorology,2012(162-163):14-26.
[2]孙艳成,王然,李影. 一种超声倒车雷达系统的设计[J]. 电子器件[J]. 2011(6):681-685.
[3]陈序. 基于CC1101的风速仪无线采集系统[J]. 起重运输机械,2013(3):99-101.
[4]万蓉飞,修春波,卢少磊. 基于ZigBee技术的风速测量装置系统的设计[J]. 中南大学学报(自然科学版),2013(S1):162-165.
[5]范寒柏,王涛,陈邵权. 超声波风速仪的电路研究与开发[J]. 仪表技术与传感器,2012(12):23-25.
[6]杜伟略,谈向萍. 低功耗超声波风向风速传感器设计[J]. 测控技术,2013(9):12-13.
[7]丁向辉,李平. 基于FPGA和DSP的超声波风向风速测量系统[J]. 应用声学,2011(1):46-52.
[8]吴宗玲,闰连山,曾德兵. 基于ARM+CPLD的高精度超声波风速仪的设计[J]. 传感器与微系统,2012(6):101-103,107.
陆健(1989-),男,汉,江苏淮安人,南京信息工程大学信息与控制学院在读硕士研究生,主要研究方向为超声波检测、嵌入式仪器仪表,lujian.nuist@hotmail.com;

张自嘉(1964-),男,南京信息工程大学信息与控制学院教授,硕士生导师,研究方向包括传感与测量系统、智能仪器仪表、新型气象观测方法与仪器,zhzijia@126.com。
DesignofWirelessUltrasonicAnemometerBasedonARMandCPLD*
LUJian1,ZHANGZijia1,2*
(1.Institute of Information and Control,Nanjing University of Information Science and Technology,Nanjing 210044,China;2.Collaborative Innovation Center on Forecast and Evaluation of Meteorological Disasters,Nanjing University of Information Science and Technology,Nanjing 210044,China)
The principle of measurement of wind speed and direction using ultrasonic Time-of-Flight was introduced in the triangle array. The design of ultrasonic anemometer based on ARM and CPLD was described. The method of ultrasonic anemometer based on LPC1768 and EPM240T100C5 was given. The driving circuit,signal conditioning circuit,wireless transceiver module and the software design were introduced. The experiments testify the system can accurately measure wind speed and direction. It also has other advantages such as good reliability.
ultrasonic wind measurement;Time-of-Flight;ZigBee;LPC1768;EPM240T100C5
项目来源:国家自然科学基金项目(61172029)
2013-12-12修改日期:2014-02-13
TH815
:A
:1005-9490(2014)06-1130-06
10.3969/j.issn.1005-9490.2014.06.025
猜你喜欢
声学与电子工程(2021年3期)2021-10-13
海洋通报(2020年5期)2021-01-14
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
电子制作(2018年2期)2018-04-18
水下无人系统学报(2017年5期)2017-11-22
军事文摘·科学少年(2016年7期)2016-09-20
西南交通大学学报(2016年4期)2016-06-15
电子制作(2016年21期)2016-05-17
雷达与对抗(2015年3期)2015-12-09
