基于高精度北斗定位的大坝形变监测*
2014-09-06 10:49:55吴焕琅蒋云钟
单片机与嵌入式系统应用 2014年1期
吴焕琅,蒋云钟
(1. 福建三元达通讯股份有限公司,福州 350000;2. 中国水利水电科学研究院)
基于高精度北斗定位的大坝形变监测*
吴焕琅1,蒋云钟2
(1. 福建三元达通讯股份有限公司,福州 350000;2. 中国水利水电科学研究院)
北斗大坝形变监测是北斗卫星高精度定位的一种具体应用,本文主要介绍北斗大坝形变监测系统的组成结构、数据处理流程,以及使用定位数据处理误差改正模式来提高监测精度的方法。采集的北斗卫星数据通过通信网络送到数据处理中心,解算数据得到监测点和基准站的相对位移,从而达到监测大坝形变的目的。
北斗;高精度定位;大坝形变;误差改正
引 言
北斗大坝形变监测主要采用北斗差分定位方式,在一个已知经纬度等信息的基准站设置高精度北斗接收机,在大坝坝体上设置的若干高精度北斗接收机等设备作为监测点,同时观测相同的北斗卫星,获取相应的北斗卫星数据。采集的北斗卫星数据通过通信网络送到数据处理中心,解算数据得到监测点和基准站的相对位移,从而达到监测大坝形变的目的[1]。
1 北斗大坝形变监测系统组成
北斗大坝形变监测系统由数据采集子系统、通信网络、数据分析处理中心、远程监控平台等构成。
1.1 数据采集子系统
数据采集子系统包括基准站和监测点两部分。数据采集子系统功能是:采集基准站及监测站的定位信息,并定时向数据处理中心发送采集的数据。
基准站是整个监测系统的基准参考,需建在稳定的基岩上,基准站安装高精度北斗接收机采集卫星观测数据。监测站分布在整个形变区域特征点上,即在坝体预埋多个高精度北斗接收机、电子数据采集主机和电子传感器作为监测站。
1.1.1 数据采集主机
数据采集主机特点如下:
① 高精度卫星接收机一次输出的数据量较大,要求缓存较大,通信链路断时需要本地保存大量数据,要求外接TF存储器作为北斗数据存储器。MCU选用ST公司的一款Cortex-M3芯片。
② 数据采集主机与高精度北斗卫星接收机同在一个金属壳体内部,连接高精度北斗接收机的串口不需防雷处理,采用普通串口即可。UART1 RS232连接北斗接收机,采集北斗数据。
③ 隔离485接口主要连接电子式水平传感器、垂直位移传感器、485接口水位计、485接口雨量传感器、土层湿度传感器等。
④ 带防护装置的网口用于连接通信网络,向数据处理中心发送采集的北斗定位数据和外部传感数据。
⑤ 4~20 MA模拟信号输入口用于连接4~20 MA输出接口的雨量传感器、水位计、土层湿度传感器等。输入信号经过电流/电压变换后送入MCU的A/D转换器进行数字化处理。
⑥ 许多翻斗式雨量传感器等输出的是脉冲信号,可以通过计数脉冲输入口接入。计数脉冲经过普通MCU的I/O口输入,结合内部定时器/计数器统计雨量。
数据采集主机原理框图如图1所示。
1.1.2 大坝形变监测常用的电子传感器
(1) 水位计
水位计种类比较多,有浮子式水位计、超声波水位计、压力式水位计、投入式水位计等,各有特点,使用时要根据坝体周围的具体情况选用。
① 浮子式水位计其原理是由浮子感应水位的升降。有用机械方式直接使浮子传动记录结构的普通水位计,有把浮子提供的转角量转换成增量电脉冲或二进制编码脉冲作远距离传输的电传、数传水位计,还有由微型浮子和许多干簧管组成的数字传感水位计等。应用较广的是机械式浮子水位计。应用浮子式水位计需有测井设备,只适合于岸坡稳定、河床冲淤很小的低含沙量河段使用。
② 超声波水位计是反射式水位计的一种,应用声波遇不同介面反射的原理来测定水位。分为气介式和水介式两类。气介式以空气为声波的传播介质,换能器置于水面上方,由水面反射声波,根据回波时间可计算并显示出水位。仪器不接触水体,完全摆脱水中泥沙、流速冲击和水草等不利因素的影响。水介式是将换能器安装在河底,向水面发射声波,也不需要建测井。两种水位计均可用电缆传输至室内显示或存储记录。
③ 压力式水位计的工作原理是测量水压力,推算水位。其特点是无需建静水测井,可以将传感器固定在河底,用引压管消除大气压力,从而直接测得水位。压力式水位计有两类:一类为气泡型,在引压管中不断输气,用自动调节的压力天平将水压力转换成机械转角量,从而带动记录机构;另一类为电测型,它应用固态压阻器件作传感器,可直接将水压力转变成电压模量或频率量输出,然后用导线传输至岸上进行处理和记录。
④ 跟踪式水位计又称接触式水位计,利用重锤上的电测针接触水面发出电信号,使电机正转或逆转,随时跟踪水面点的位置,从而测定水位。一般在较陡岸坡上架设铁管,悬锤和悬索在管道中升降,驱动记录或信号装置。铁管进水口需有沉沙和净水设施。
⑤ 投入式液位计是基于所测液体静压与该液体高度成正比的原理,采用扩散硅或陶瓷敏感元件的压阻效应,将静压转成电信号。经过温度补偿和线性校正,转换成4~20 mA标准电流信号输出。投入式液位计的传感器部分可直接投入到液体中,变送器部分可用法兰或支架固定,安装使用较为方便。
考虑数据采集主机用以连接传感器的接口只有485接口和4~20 mA输入接口,因此选用水位时应考虑接口匹配。
(2) 雨量传感器
最常用的雨量传感器是翻斗型雨量传感器,主要工作原理是承水口收集的雨水,经过上筒(漏斗)注入计量翻斗,翻斗是用工程塑料注射成型的,由中间隔板分成两个等容积的三角斗室。它是一个机械双稳态结构,当一个斗室接水时,另一个斗室处于等待状态。当所接雨水容积达到预定值0.4 mm(假定测量精度为0.4 mm)时,由于重力作用使自己翻倒,处于等待状态,另一个斗室处于接水工作状态。当其接水量达到预定值时,又自己翻倒,处于等待状态。在翻斗侧壁上装有磁钢,它随翻斗翻动时从干式舌簧管旁扫描,使干式舌簧管通断。即翻斗每翻倒一次,干式舌簧管便接通一次送出一个开关信号(脉冲信号)。
翻斗式雨量传感器直接通过数据采集主机的计数脉冲输入接口传送脉冲数据。
雨量信息采集可以不使用雨量传感器,直接采用雨量监测站通过无线GPRS网络向数据处理中心传送气象数据。
(3) 位移传感器
高精度北斗卫星接收机本身可以进行水平和垂直位移测量,考虑成本及安装方便等因素,时常将高精度北斗卫星接收机与电子位移传感器结合使用。位移传感器包含水平位移和垂直位移传感器,主要有电感式、电容式、光电式、霍尔式、涡流式位移传感器,激光位移传感器使用比较方便,不用其他外部设备,可以输出数字和模拟信号,可以与数据采集主机的485接口或4~20 mA输入接口相连接。
1.2 数据处理与分析中心
数据处理中心负责接收处理基准站和监测点北斗数据,数据处理中心将星历、原始观测数据如卫星号、伪距、伪距标准差、载波相位、载波相位差、瞬时载波多普勒频率、载噪比、连续跟踪秒数等数据采用双差解算模式,在优化载波相位差分数据处理方法的基础上,同时处理基准站和监测站载波相位数据,得到精确的监测点相对于基准点的形变量,从而获取整个坝体区域的形变信息。
数据处理中心主要由通信网络、数据处理软件、服务器等组成。
1.3 远程监控中心
远程监控中心可与数据处理中心并置,远程监控中心是整个系统的神经中枢,负责监测信息的处理,融合水文、气象等信息,组成大坝形变监测信息自动处理与应急预警信息平台。
2 北斗数据处理流程
北斗数据处理主要可分为数据清理、数据处理、结果分析等几个流程,具体如图2~图4所示。
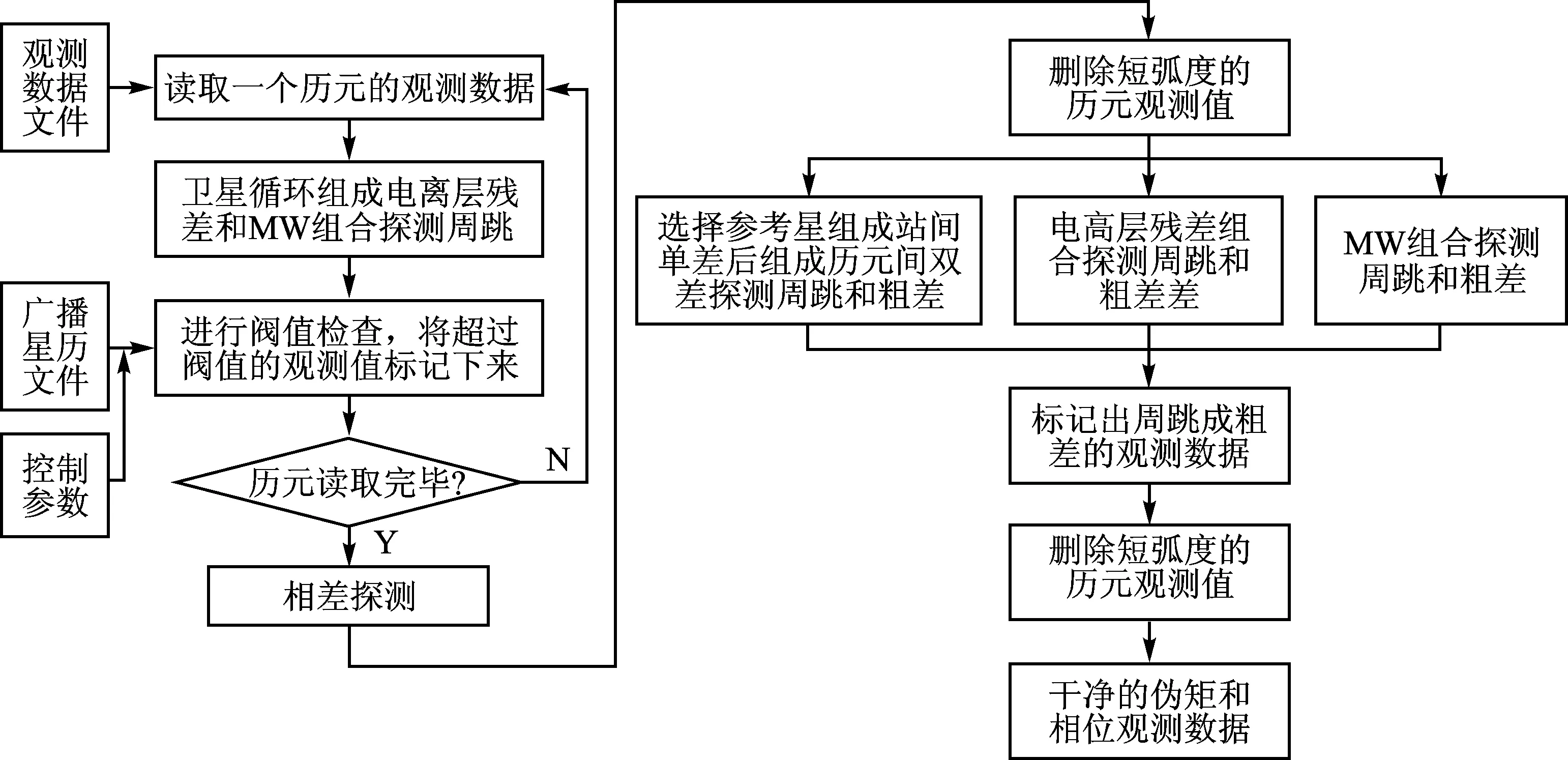
图2 数据清理流程图

图3 数据处理流程图
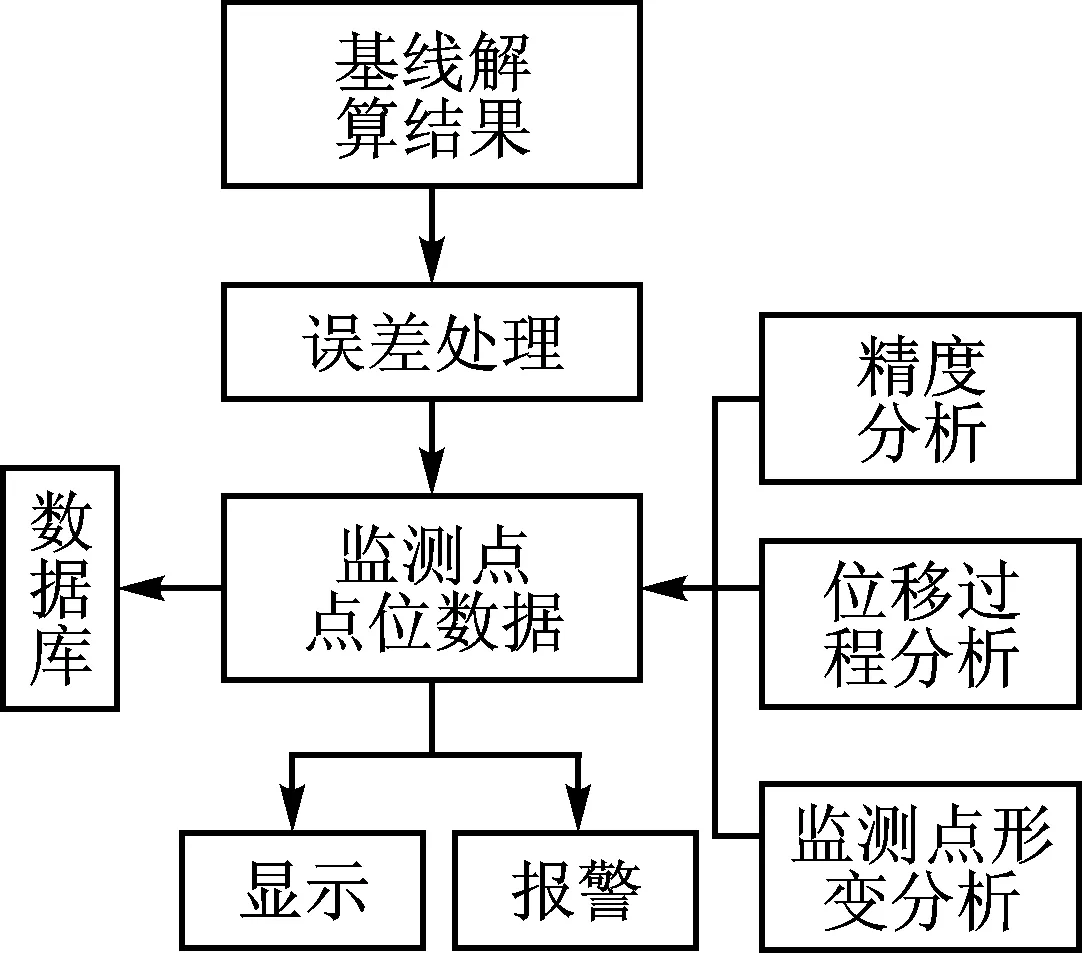
图4 结果分析流程
3 数据处理误差改正模型
在相对定位中,涉及的关键数据处理过程是基线解算,基线解算可以分为:长基线、中长基线和短基线三种类型。这里介绍短基线数据处理中相关的误差影响因素[2]、误差消除或削弱的方法。
3.1 短基线的卫星星历误差影响
由卫星星历所给出的卫星位置与实际卫星位置的差值称为卫星星历误差。星历误差的大小取决于卫星定轨系统的质量,如定轨站的数量及其地理分布、观测值的数量及其精度、定轨的数学力学模型和定轨软件的完善程度等。在一般工程应用中,特别是北斗短基线的数据处理中,由于基线较短,通常采用广播星历即可满足应用的要求。
在相对定位中,卫星的星历误差对解算精度影响较小,利用广播星历进行相对定位时,即使基线长度达到56 km时,其误差影响仍然保持在1 cm以内,故对于短基线(10 km 以内)来说,其误差的影响非常小,可以忽略不计。
3.2 短基线的卫星钟差与接收机钟差影响[3]
卫星上计时工具是高精度的原子钟,但卫星钟也不可避免地会产生误差,这种误差既包含系统性的偏差(如钟差、钟速、钟漂等),也包括随机性质的偏差。系统误差可以通过检验和对比来确定,并通过相应的数学物理模型加以改正;而随机误差只能通过钟的稳定度来描述其统计特性,无法确定其具体的大小和方向。
与卫星钟一样,接收机钟也会产生误差,接收机钟为石英钟,接收机钟差较卫星钟差来讲要显著一些。该项误差主要取决于钟的质量,与使用的环境也有一定的关系。它对测码伪距观测值和载波相位观测值的影响是相同的。
某一时刻t0的钟差一般可以表示为:
式中:a0为t0时刻该钟的钟差;a1为t0时刻该钟的钟速;a2为t0时刻该钟的加速度的一半。
利用载波相位观测值进行相对定位时,根据卫星导航电文所给的卫星钟参数而求得的卫星钟差不能作为最后的精确值,在建立观测方程时必须将其视为未知参数。由于进行同步观测时,不同的观测值中会包含有同样的钟差影响,故可以通过观测方程相减来消除这些钟差的影响。假设同步观测n颗卫星,在短基线(甚至长基线)数据处理中,首先选择一个卫星作为基准星,并将其余的(n-1)个观测方程分别与基准星观测方程相减,那么在这(n-1)个求差以后的新观测方程中,某一对应的时刻t0接收机的钟差将被消除。
在两站之间,进行站间单差就可以将卫星钟差消除。把不同时刻,不同站间的钟差视为一个独立的未知参数,通过相应的观测方程相减来消除这些钟差的影响,最后再组成法方程。
3.3 短基线的电离层延迟影响
卫星电磁波信号在穿过电离层时,传播速度会产生变化,变化程度主要取决于载波信号频率和电离层中的电子密度;传播路径也会发生略微的弯曲,由此而产生的误差影响称为电离层延迟误差。
消除和削弱电离层延迟的方法有很多,比如模型法,包括Bent模型、国际参考电离层模型、Klobuchar模型和双频改正模型等。还有用实测双频观测值来建立电离层延迟改正模型等,在不同的观测条件下采用相应的模型可以较好地削弱电离层延迟影响[4]。但目前最常用的为采用双频观测值消除电离层影响,利用双频观测值消除一阶项电离层影响后,剩余的高阶项影响对于短基线来说一般很小,可忽略不计。
3.4 短基线的对流层延迟影响
对流层延迟一般泛指中性大气层对电磁波的折射。中性大气层包括对流层和平流层,大约是大气层从地面向上40 km部分。由于折射的80%发生在对流层,所以通常也叫做对流层折射延迟。对流层对于15 GHz的射电频率呈中性,信号传播产生非色散延迟,使电磁波传播路径比几何距离长。电磁波在对流层的传播速度只与大气的折射频率及电磁波传播方向有关,与电磁波频率无关。
对流层折射影响通常表示为天顶方向的对流层折射量和与高度角相关的投影函数M的乘积。并且对流层延迟的90%是由大气中干燥气体引起的,称为干分量;其余10%是由水汽引起的,称为湿分量。因此,对流层延迟可用天顶方向的干、湿分量延迟及其相应的投影函数表示[5]:
式中:ΔPtrop为对流层总延迟;ΔPz,dry为天顶方向对流层干分量延迟;Mdry(E)为相应的对流层干分量投影函数;ΔPz,wet为天顶方向对流层湿分量延迟;Mwet为相应的对流层湿分量投影函数。
常见的确定对流层延迟改正的有Hopfield模型、Saastamoinen模型等。投影函数有Marini(1972)、Chao(1972)、Davis(1985)及Niell(1996)等模型。在精密定位中经常采用Niell模型,Niell模型除了考虑纬度因素外,还考虑了对流层的季节性变化和高度不同的影响,其不包含气象元素,不会受气象元素观测误差的影响,其没有考虑实测的气象数据,也能与无线电探空数据计算出的投影模型相符合。对流层影响利用模型改正后,干分量部分的改正精度可以达到cm级,而湿分量部分的残余影响还比较大,在精密定位中,必须利用参数估计的方法将对流层残余影响当作一个参数进行估计。
大坝形变监测精度要求达到mm级,需要对以上几个误差进行建模处理,方能满足要求。
结 语
北斗高精度大坝形变监测主要是利用连续运行卫星定位参考站技术、卫星定位数据高精度处理技术、物联网技术、通信技术及信息处理技术等,实现对大坝形变的全天候、自动化、高精度、高可靠监测,具有要求通视的常规测绘技术无法比拟的优势。

[1] 陈实,软晓伟,林春和.采用GPS定位技术进行堤坝形变监测[J].东北测绘,1998(3).
[2] 苗成慧,青盛. GPS基线解算方法分析[J].四川建筑, 2007,27(4).
[3] 赵娟.GPS单点定位星历和钟差研究[D].辽宁:辽宁工程技术大学,2011.
[4] 袁运斌.基于GPS的电离层监测及延迟改正理论与方法的研究[D].中国科学院测量与地球物理研究所,2002.
[5] Jan Kouba, Pierre Héroux. Precise Point Positioning Using IGS Orbit and Clock Products[EB/OL].[2013-08]. http://link.springer.com/article/10.1007/PL00012883#.
吴焕琅(高级工程师),主要研究方向为嵌入式系统开发,北斗高精度定位。从事电信通信、电子开发、技术管理等工作20多年。
(责任编辑:杨迪娜 收修改稿日期:2013-08-10)

参考文献
[1] 胡瑶荣.基于FPGA的实时视频采集系统[J].电视技术,2005,29(2):81- 83.
[2] 顾一.基于CCD的图像采集和处理系统[D].杭州:浙江大学,2008.
[3] Omni Vision Technologies. OV7670/OV7171 CMOS VGA CAMERACHIPTM with omni pixel technology,Version 1.3[EB/OL].[2013- 09].http://www.ovt.com.
[4] 丁昊杰,刘敬彪,盛庆华.基于CMOS图像传感器的视频采集系统设计[J].现代电子技术,2012,35(14):178- 181.
[5] 杨征,田尊华,张杰良,等.视频技术手册[M].北京:人民邮电出版,2009.
[6] 宋海吒,唐立军,谢新辉.基于FPGA和OV7620的图像采集及VGA显示[J].电视技术,2011,35(5):45- 47.
高强(硕士研究生),研究方向为图像采集与信息处理;王炜(副教授),研究方向为电气传动自动化;刘建(硕士研究生),研究方向为嵌入式系统开发;郭毓敏(硕士研究生),研究方向为EDA技术。
(责任编辑:杨迪娜 收修改稿日期:2013-09-06)

Wu Huanlang1,Jiang Yunzhog2
(1. Fujian Sannada Communication Co.,Ltd., FuZhou 350000,China;2. China Institute of Water Resources and Hydropower Research)
Beidou dam deformation monitoring is a practical application of beidou satellite precise positioning, the article mainly introduces the composition of beidou dam deformation monitoring system structure, data processing and using positioning data to process error correction model methods for increasing accuracy of monitoring. Collected beidou satellite data through the communication network to send data processing center, after solver data, monitoring points and the relative displacement of the base station are achieved, it is achieve the purpose of monitoring dam deformation.
Beidou;high precision positioning;dam deformation;error correction
TN966
A
猜你喜欢
区域治理(2021年14期)2021-08-11 08:57:30
水运工程(2020年2期)2020-02-26 06:06:42
导航定位学报(2018年3期)2018-09-03 00:56:16
载人航天(2016年4期)2016-12-01 06:56:24
石油石化节能(2016年12期)2016-06-28 16:30:31
成都信息工程大学学报(2016年6期)2016-06-01 12:10:06
水利科技与经济(2016年9期)2016-04-22 01:07:30
中国设备工程(2015年5期)2015-12-27 12:34:53
水利信息化(2015年5期)2015-12-21 12:54:38
沙漠与绿洲气象(2014年1期)2014-03-20 15:41:56