基于实时信息的飞机装配技术状态管理方法研究
2014-09-05 06:34:03张小瑞闫振强
机械设计与制造工程 2014年2期
张小瑞,郭 宇,闫振强
(南京航空航天大学 机电学院,江苏 南京 210016)
基于实时信息的飞机装配技术状态管理方法研究
张小瑞,郭 宇,闫振强
(南京航空航天大学 机电学院,江苏 南京 210016)
为了解决飞机装配过程中的实时数据采集和分析问题,提出了一种基于实时信息的飞机装配技术状态管理方法。方法的核心是建立技术状态数据网络模型,利用RFID技术来配置模型;同时,建立沿时间轴的技术状态数据网络,实现装配过程中的信息跟踪、监控、识别及溯源。
飞机装配;技术状态;数据模型;RFID
目前,装配制造企业尤其是飞机装配企业生产过程中最大的难题就是技术状态的清理,飞机装配过程是典型的复杂系统实现过程[1],随着飞机并行研制过程的不断深入,以及新技术新工艺的发展,技术状态清理工作量必将越来越大,飞机装配过程技术状态管理就显得尤为重要。
对于飞机技术状态管理的研究大多聚焦于飞机设计时的产品结构配置、变型设计、设计版本管理,以及装配前的工艺规划、虚拟装配、工艺版本管理等[2-4],装配过程中的实时信息采集与管理问题研究较少。飞机装配技术状态的管理主要依赖于生产过程中手工记录的信息,突出的3个问题是[4]:(1)管理人员无法在第一时间获取装配过程中发生的设备故障信息以及由人员变更引起的质量问题,难以迅速处理问题和及时调度车间资源;(2)物料与装配任务缺乏有效的匹配标识,工人只能凭借主观判断来完成装配过程,容易造成错装;(3)装配过程组织混乱,存在多工位人员的“并行操作”,缺乏行之有效的装配流程和规范。因此针对飞机制造过程中的多样性与复杂性,建立一种飞机装配技术状态数据网络模型,利用射频识别技术来配置数据模型,并通过数据信息来分析装配过程,服务生产管理,以此来实现飞机装配过程技术状态管理。
1 飞机装配技术状态管理
1.1飞机装配技术状态元素网络模型
飞机装配过程由若干装配段位(如前、中、后机身装配段位)组成,每个段位又可以细分为若干装配工位。通常情况下每个装配工位的具体执行内容由装配大纲(AO)制定,AO中的装配工序细化装配内容,装配工序结束后需要进行重要工序的检验。飞机装配技术状态的主要元素可归纳为:装配段位、装配工位、AO、装配工序、检验。建立飞机装配技术状态主要元素之间的模型关系网络,如图1所示,将装配段位、装配工位、AO、装配工序、检验定义为模型的5类重要的元素,分别用符号A、S、AO、P、E标识,5类元素可以在XOY平面内组成一个完整的装配技术状态模型。一般情况下某型飞机至少有2种或2种以上的型号,F1和F2分别表示飞机的2种改版机型,每种机型都应该有3个以上的装配段位,不同型号之间会存在重复的装配段位,如F1和F2共用的装配段位为A11,A21,A41。同种元素不同类型用数字予以区别,同种类型的不同版本用上标进行区别,例如A1和A2分别表示2个不同的装配段位,而A31和A32表示同一装配段位的不同版本。装配过程中还存在着装配工位的共用现象,如装配工位Sm1就是由不同装配段位的机型所共用。这种情况在实际的装配过程中较为常见,需要考虑在模型模板中,达到真正意义上的飞机装配技术状态的管理。
1.2飞机装配技术状态数据网络模型
飞机装配技术状态的管理是一个动态过程,为了描述这种动态过程需要在XOY平面基础上增加时间轴来实时记录飞机装配技术状态,如图2所示。
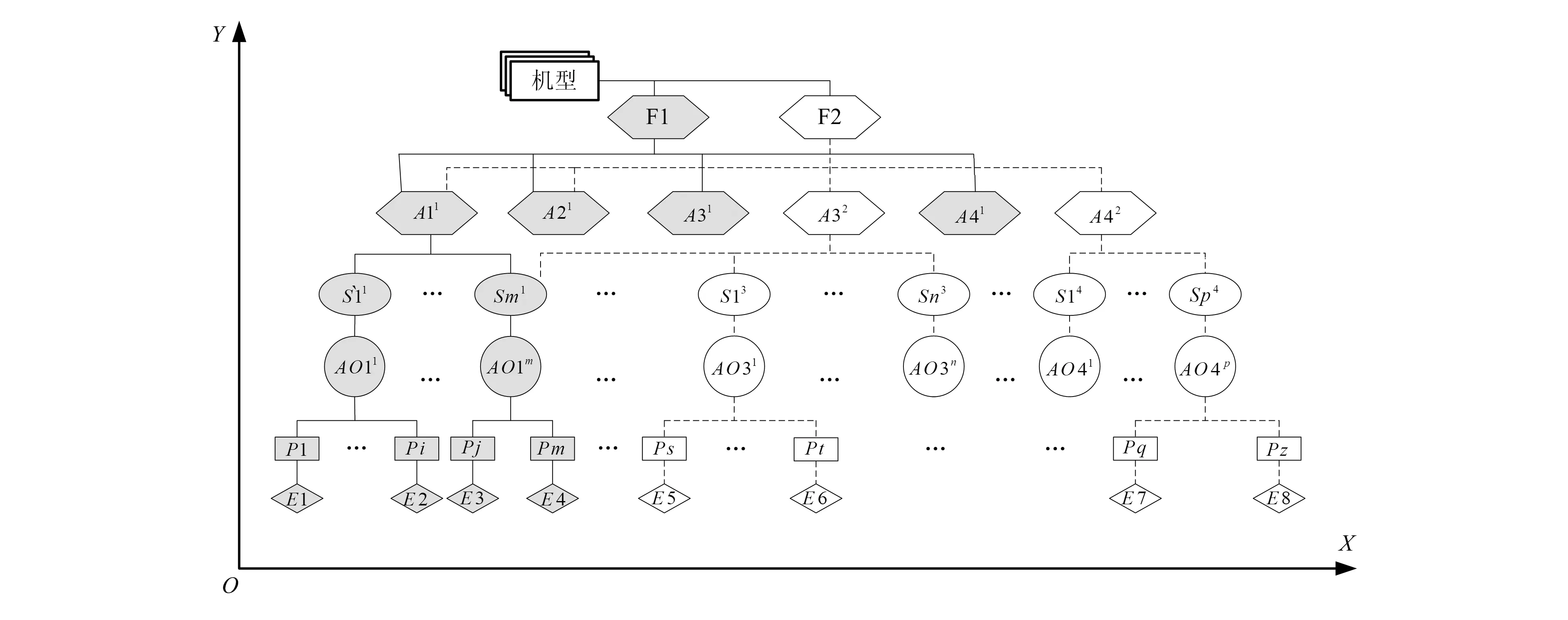
图1 机型装配技术状态元素网络模型

图2 飞机装配技术状态数据网络模型
T1时刻,参数化的飞机装配技术状态数据模型可以用T1来表示,并在Z=T1平面上进行映射。同样的,在后续装配过程中的T2,T3,T4时刻,需对装配技术状态模型进行参数化处理,形成的数据模型分别在垂直于时间轴的Z=T2、Z=T3、Z=T4平面上进行映射。通过增加时间轴的方式完成对飞机装配技术状态模型数据信息的实时化处理,形成了真正意义上的基于实时信息的飞机装配技术状态管理模型网络。
2 飞机装配过程技术状态数学模型
2.1飞机装配技术状态数学模型定义
通过对飞机装配过程中各个工位的监控,可以获知任意工位装配过程中的实时技术状态[5-6],并能以此进一步实现飞机装配过程技术状态的监控、对比和回溯。装配生产的过程中,技术状态的管理是随着加工人员、时间以及工位等因素实时变化的[7]。以装配车间具体工位为监控节点,形成装配车间的监控网络,在监控过程中重点关注以下几个要素:装配零件、工人、时间、工序内容和工序状态,它们是装配工位技术状态的基本要素。其中装配零件用D来指代,工人用R来指代,工序内容与工序状态可由工位信息W来提供,根据以上信息将工位M技术状态组成定义如下:

(1)
式中:D={di|i=1,2,3,…,m;},代表所有装配零件的集合,di的值为零件号;R={rj|j=1,2,3,…,n;},代表所有工人的集合,rj为工人的工号;W={wk|k=1,2,3,…,z;},代表车间中所有的工位的集合,wk为各个工位的代码,例如飞机机翼段的工位,包括前缘襟翼Ⅰ段装配工位、前缘襟翼Ⅱ段装配工位、机翼外架总装工位、机翼精加工工位等;Q={ql|l=1,2,3;},代表各个零件在各个工位所处的装配状态,包括待装配、装配中、已装配;T={tdi[wk,ql,rj]},代表装配零件的实时状态,即装配零件在当前状态下的工位信息、工序状态以及操作人员信息,将以上3个信息列为在某一时刻的状态集,那么每一组相互关联的(di,rj,wk,ql,t)就构成了一个唯一的装配零件实时状态。把di,rj,wk,ql,t定义为装配系统技术状态(Technology State of Assembly System)的5个基本属性:
ASTS={DT,D,R,W,Q,T,ΔT,A}
(2)
式中:DT={dtn},代表某工位上装配零件种类的集合。ΔT={Δtdtn[wkql,wk+xq1+y]},表示dtn种类的零件从(工位wk,工序状态ql)到(工位wk+x,工序状态ql+y)经历的额定时间集合。A={A[dtn]},代表所有零件装配工艺的矩阵集合,令A′={A′[di]},表示所有零件实时装配的进度状态集合,A[dtn]与A′[di]同为k行l列的矩阵,行代表工位wk,列表示工序状态ql,其中a[dtn]k,l=1,表示dtn种类的零件必须经过工位wk并处于工序状态ql,a[dtn]k,l=0,代表此种类零件无需经过此工位进行此道工序的操作;a′[di]k,l=1,表示零件di已经过工位wk且处于工序状态ql,a′[di]k,l=0,表示该零件并未经过此工位。
2.2飞机装配技术状态数学模型计算
零件装配过程工时定义为从涉及零件装配的工序开始到最后一道工序截止,可得零件完成全部装配过程工时:
Δtdi[wkql,wk+xql+y]=tdi[wk+x,ql+y]-t[wk,ql]
(3)
式中Δt是零件di从(工位wk,工序状态ql)到(工位wk+x,工序状态ql+y)所经过的时间。
零件装配进度定义为当前装配量与总装配量之间的百分比:
ΔA[di]=A′[di]-A[dtn] (当且仅当di⊂dtn时)
(4)
(5)
装配执行过程中,若a[dtn]k,l=1,a′[dtn]k,l=0,那么该工位工序内容并未正常执行,对应工位集合W={wk|k=1,2,3,…,z;}及工人集合R={rj|j=1,2,3,…,n;}中有异常情况出现。
当rj=1、wk=0时,需要对相应工位设备进行故障检测,重新安排生产任务,下达调度计划。当wk=1、rj=0时,表明对应工位的操作人员未按指定工艺要求进行生产,需要调度人员确认生产现场状况,合理调度安排生产计划。
3 飞机装配技术状态实例分析
3.1基于RFID飞机装配技术状态网络模型的数据配置
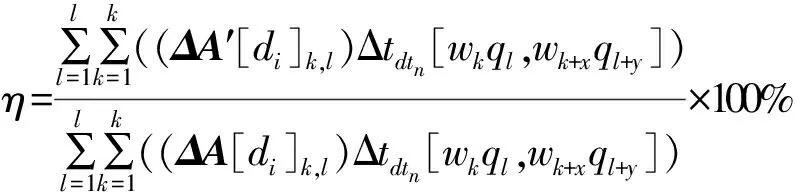
通过RFID技术配置技术状态数据模型,将所有元素的数据实例化,使得飞机装配技术状态数据模板中部分不确定的信息得以确定。飞机装配执行过程中,装配对象和装配资源上附着的RFID标签内容是随着操作流程的不同而实时变化的,以某工位装配对象数据初始化操作为研究对象,具体实施过程如图3所示,装配对象智能标签数据模型如图4所示。
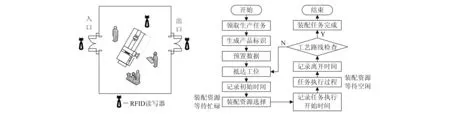
图3 基于RFID装配对象技术状态管理流程
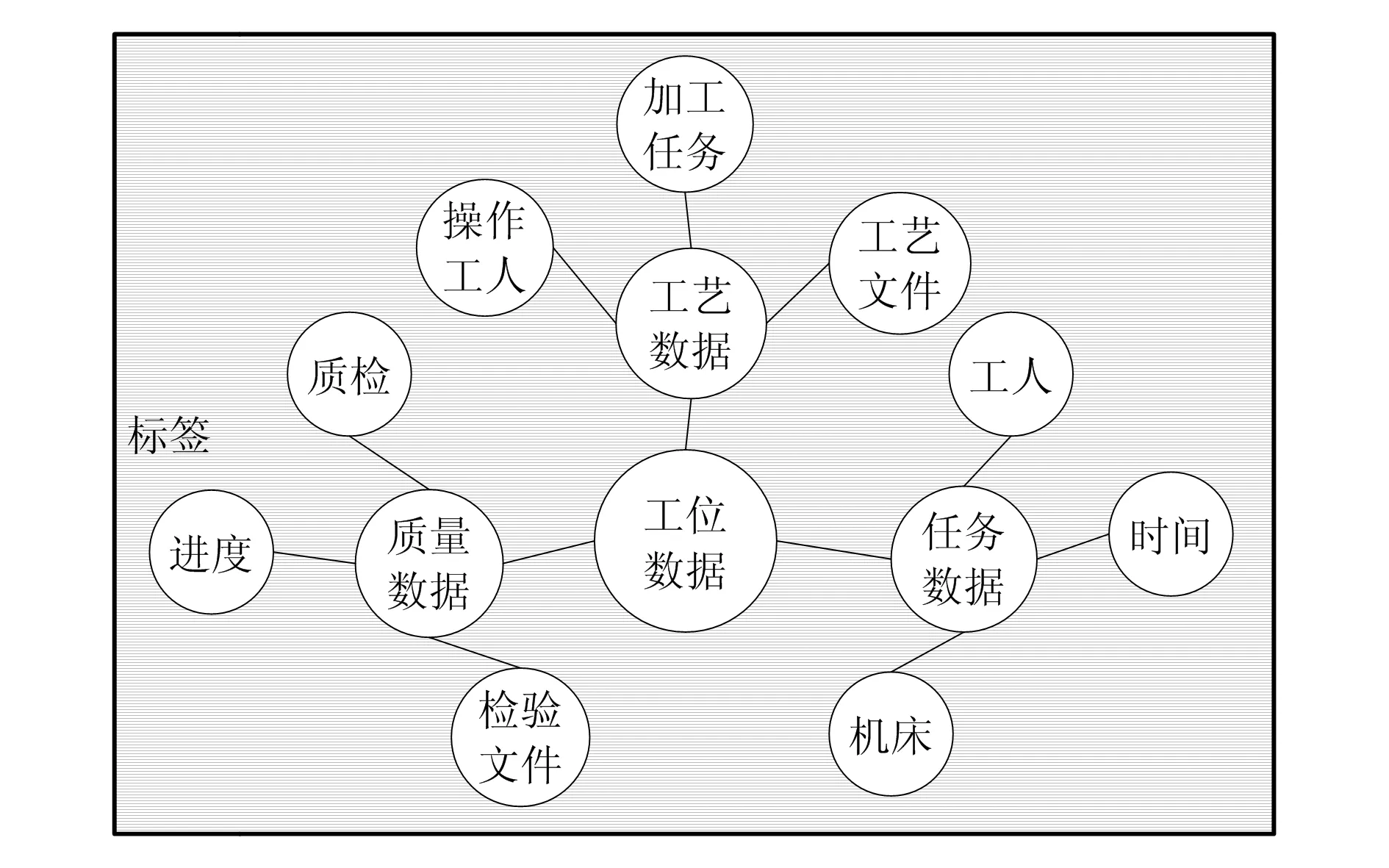
图4 装配对象RFID标签数据模型
以某工位为研究对象,在工位入口、出口及设备上分别安置RFID读写器,通过3个读写器来确定飞机装配制造过程的技术状态,具体流程步骤如下:
Step1,通过企业生产管理系统(MES)领取车间生产任务,制定可执行的生产计划。
Step2,根据产品的生产计划生成产品的唯一标识,包括产品编号、批次和入库时间,装配过程中标识信息将始终与产品相关联,为信息的统计和溯源提供依据。
Step3,在产品执行装配任务前需要通过RFID读写控制器向产品RFID标签中写入预置信息,包括工位ID、工人ID、工艺路线ID。
Step4,当产品由指定的工人带入到指定的工位后,RFID读写控制器在产品RFID标签中记录装配执行过程的初始时间。
Step5,RFID控制器将工位标签信息的状态由“空闲”改为“忙碌”,标签内记录装配工位的开始时间。
Step6,装配任务完成后,相应的工位标签信息状态由“忙碌”改为“空闲”,标签内记录装配工位的结束时间。
Step7,当装配产品离开当前工位时,RFID读写控制器在产品标签中记录离开时间。
Step8,RFID 控制器核实产品标签内的工艺路线,判断是否存在剩余操作,若仍存在剩余操作则返回相应的工位执行剩余装配任务,同时记录新一次的装配开始时间与结束时间,直至完成为止。
3.2装配系统技术状态实例分析
在装配过程中,RFID读写设备将实时信息分类汇总于不同的装配工位模型树中,表1提供了分类汇总后的襟副翼装配工位中工序内容与相应的工时、工人、检验信息。
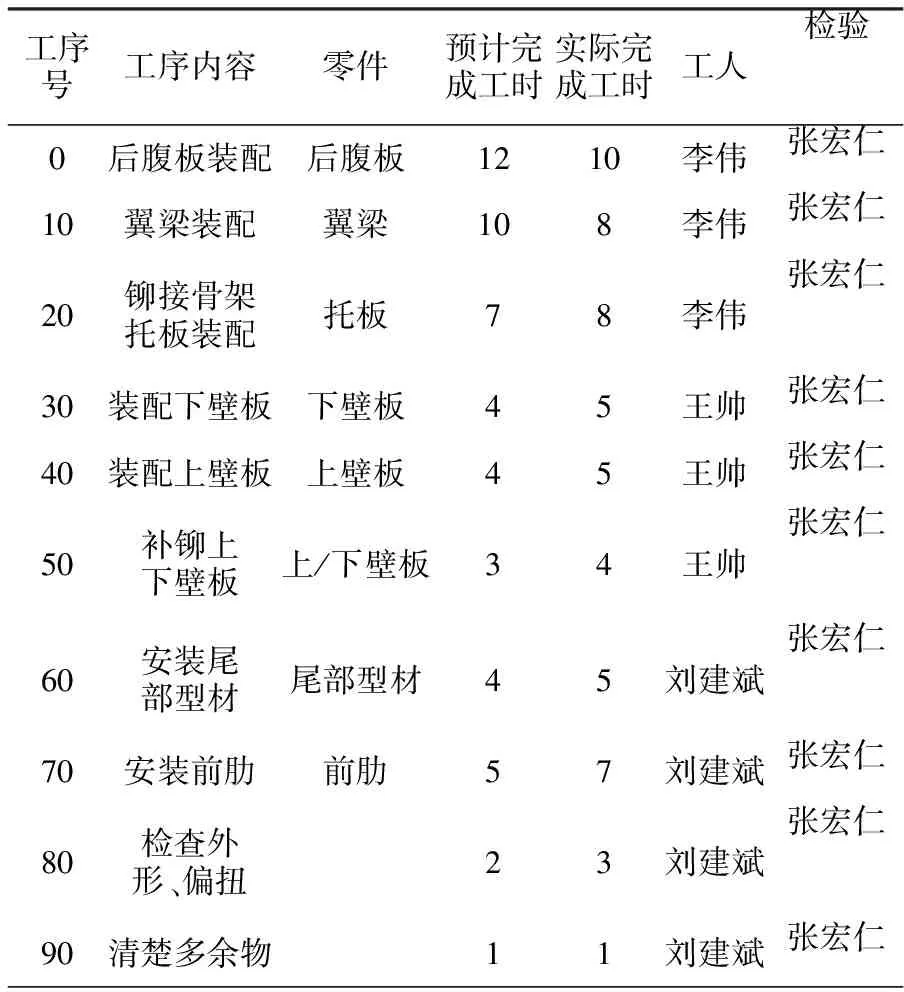
表1 襟副翼装配工位ASTS数据配置(工位:襟副翼装配工位)
此处di中的i取值为1,2,3,4,5,6,7,分别对应后腹板、翼梁、托板、下壁板、上壁板、尾部型材、前肋。假定装配工序暂时执行到工序40,那么根据装配原理可建立如下矩阵关系:

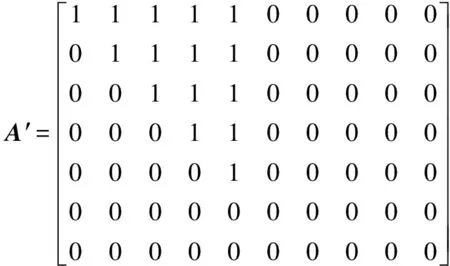
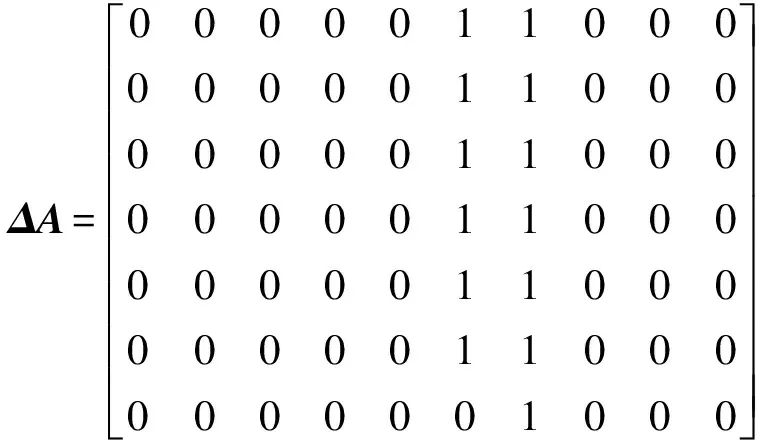
A为零件装配工艺的矩阵集合,A′为零件实时装配的进度状态集合,差别矩阵ΔA由公式(4)可得。由a′[d5]1,40=0可知装配工序50尚未执行,由公式(3)可知零件上壁板需要的装配时间为:
零件上壁板完成的装配进度由公式(5)可得:
通过RFID系统对装配工位进行实时信息的采集与分析,以此来实现装配车间资源的优化调度。若装配零件到达相应工位接收到“忙碌”反馈时,系统会第一时间在车间环境内搜索可以完成相同装配任务的工位,分配处于空闲状态的加工人员,以此来完成资源的快速搜索和再利用。数学模型中可以这样定义:
可以完成相同的任务的工位集合为:
对应装配任务有装配权限的人员集合为:
其中wk={0,1},0代表空闲,1代表忙碌。
根据RFID系统对装配工位技术状态实时信息的反馈,若装配对象在进入装配工位前采集到工位信息“1”, 生产调度人员就需要重新安排生产任务,分配空闲工位给装配对象,下达装配命令给适当人员,以此来提高装配车间的资源利用率。
4 结束语
文中对于飞机装配过程技术状态管理方法的研究具有现实可行的意义,可以为长期困扰飞机装配企业的装配过程不透明化问题提供解决方案。与传统意义上的技术状态管理相比,本文侧重于飞机装配过程中的实时信息处理,通过实时信息的配置建立飞机装配过程技术状态网络模型,形成了特有的飞机装配过程研制资料。文中虽然提出了利用RFID技术来实现装配过程数据采集,但对于RFID中间件技术还需要进行深入的学习和探索。
[1] 黄梅.武器装备研制与生产技术状态管理探究[J].空军预警学院学报,2013(2):146-148.
[2] Bernard Anselmetti,Benoit Fricero. Aid tool for the design of process and aircraft assembly lines [J]. Aerospace Science and Technology,2012,23(1):387-398.
[3] Lee Jun-Sik,Kim Jun-Ki,Kim Mok-Soon,et al.Reliability of flip-chip bonded RFID die using anisotropic conductive paste hybrid material[J].中国有色金属学报:英文版,2011,21(增刊1):175-181.
[4] 卢鹄,黄翔,堵鹏,等.基于加权有向图的飞机装配顺序规划[J].南京航空航天大学学报,2012,44(增刊1):1-5.
[5] 刘明周,王强,葛茂根,等.基于射频识别的装配过程监控体系研究[J].合肥工业大学学报:自然科学版,2012,35(9):1157-1162.
[6] 邓宇浩.装配过程质量信息采集与统计过程分析[D].武汉:华中科技大学,2012.
[7] 张洋洋,陈进.基于RFID的离散制造车间实时数据采集系统的设计与实现[J].江南大学学报:自然科学版,2013,12(1):54-58.
ResearchofAircraftAssemblyTechnologyStateBasedonReal-timeInformation
ZHANG Xiaorui, GUO Yu, YAN Zhenqiang
(Nanjing University of Aeronautics and Astronautics, Jiangsu Nanjing, 210016, China)
The core problem of the aircraft assembly technology state is the real-time data acquisition and analysis. It presents a kind of aircraft assembly technology state management method based on RFID, establishes the aircraft assembly technology state data network model, uses RFID technology to configure the technology state data model. Meanwhile, it sets up the aircraft assembly technology state data network along the time axis, and carries on the information in the assembly process tracking, monitoring, identification and traceability.
Aircraft Assembly; Technology State; Data Model; RFID
10.3969/j.issn.2095-509X.2014.02.009
2013-11-29
南京航空航天大学研究生创新基地(实验室)开放基金资助项目(kfjj130117)
张小瑞(1986—),男,陕西延安人,南京航空航天大学硕士研究生,主要研究方向为数字化设计与制造、物联网技术等。
TP391
A
2095-509X(2014)02-0041-05
猜你喜欢
井冈山大学学报(社会科学版)(2023年6期)2024-01-21 23:16:08
中国新闻周刊(2023年42期)2023-12-03 14:39:41
航空制造技术(2022年18期)2022-12-09 04:10:28
云南画报(2021年12期)2021-03-08 00:50:26
物流技术与应用(2020年5期)2020-06-25 02:48:12
意林(2020年10期)2020-06-01 07:26:37
哈尔滨轴承(2020年4期)2020-03-17 08:13:40
经济技术协作信息(2018年32期)2018-11-30 01:43:18
初中生(2018年15期)2018-06-01 02:14:35
意林·少年版(2018年23期)2018-01-05 14:55:12