
多自由度工业机器人机械手的设计方法分析
2014-09-02 01:28陆建荣
机电信息 2014年30期
陆建荣
(南通广播电视大学机械工程学院,江苏 南通 226000)
多自由度工业机器人机械手的设计方法分析
陆建荣
(南通广播电视大学机械工程学院,江苏 南通 226000)
概述了工业机器人研究现状及其发展趋势,以一台四自由度的工业机器人设计为例,详细介绍了其驱动方式、传动方式以及制动器的设计方法,从而有效实现对其机械手的设计。
多自由度;工业机器人;机械手;设计
0 引言
伴随当今制造业的迅猛发展,企业为了进一步提高产品的生产率及质量,对生产过程的自动化程度极为重视,而作为自动化生产线上重要工具的工业机器人便逐渐为企业所采纳[1]。工业机器人主要从事一些搬运以及焊接等具有超强劳动强度的工作,其应用程度及技术水平是一个国家工业自动化水平的重要反映,并且在许多人类极限以外的领域发挥着无可替代的作用[2]。
1 工业机器人研究现状及其发展趋势
与国外技术相比,我国机器人技术起步较晚,相对落后,不过仍然在机器人单元技术以及机器人基础技术等方面取得不小的成就。目前,我们正致力于研究用于生产线上的工业机器人、特种机器人以及智能机器人等。
2 工业机器人的机械手设计
本文以一台四自由度工业机器人为例,该机器人主要功能是将物料运送给冲压设备。其设计的主要目的是利用现在已有报废的焊接机器人,对其原有结构作进一步改造,并有效实现对其机械手的设计。这种四自由度的工业机器人拥有腰关节、肩关节、肘关节以及腕关节四个自由度,同时还包括一个机械手(主要作用是夹持物料)[3]。
机器人直接用来吸附并抓取扳手、喷头以及喷枪等专用工具的操作部件为工业机器人的机械手,其又被称为末端执行器,被安装在机器人手臂的前端,主要功能是模仿人手动作。鉴于机械手抓取的工件各种参数(如尺寸、形状、材质以及重量等)不同,因而工业机器人的机械手(末端执行器)种类样式很多,如吸附式取料机械手、专用操作器及转换器、夹钳式取料机械手、仿生多指灵巧机械手等。文中设计的机器人主要是用来搬运物料,因而无需设计成多指的灵巧人工指,设计时只需将机械手设计成从不同角度对工件进行抓取的钳形指即可。手指是工件与机器人直接接触的部位,其对工件的夹紧与松开,是利用手指的闭合及张开完成的。此外,机械手的传动机构主要是将动力和运动传递给手指,从而实现对工件的夹紧或松开。从手指开合的动作特点来说,可以将其传动机构分为平移型及回转型2种,而本设计的传动机构为回转型,如图1所示。
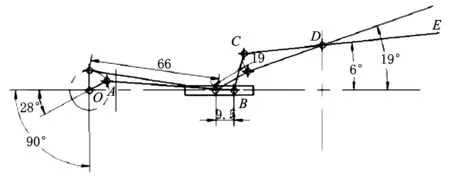
图1 机械手机构简图
由图1可知,其中O代表的是电机输出轴,而OA曲柄、AB连杆、B滑块以及支架组成一个曲柄滑块机构;并由B滑块、BC连杆以及CE摇杆与支架组成一个滑块摇杆机构,利用两机构的串联,从而在电机的驱动下,令DE呈现出来回摆动的运动状态,进而使得手指通过开合实现抓取及松开的动作。同时,为使手指合拢变得更为顺利,还可将一个弹簧设置在两个手指之间,从而适当增加手指的夹紧力。此外,需要注意电机的选取,电机功率应当足够令弹簧实现张开或者收缩运动,同时还能提供足够将物体夹紧和提取的力。
3 驱动及传动方式的设计
本四自由度工业机器人具有四个独立的转动关节,再加上末端机械手的运动,所以其动力源一共需要5个。通常情况下,机器人的驱动方式主要包括气动、液压驱动以及电机驱动等。综合参考机器人驱动系统的优缺点,一般对其驱动系统的要求包括:(1) 尽可能保证驱动系统的质量较轻,从而进一步提高其单位质量的输出功率以及工作效率;(2) 要保证机械手具有足够的反应速度,确保其力矩转动惯量比及力矩质量比越大越好,以便令电机能够频繁启动和制动,顺利完成正转与反转两方面的快速切换;(3) 尽可能保证其驱动的灵活性,以便能有效降低其速度偏差以及位移偏差;(4) 确保电机具有操作及维护的方便性、运行的安全可靠性、经济上的合理性等。
而传动方面,因为电机驱动系统通常输出的力矩偏小,因而要增加其力矩,需要通过传动机构来进行。通常情况下,对四自由度工业机器人传动机构的要求包括:(1) 要求传动机构具有紧凑的结构,即要求在传动比与传动功率相同时,要保证其传动机构具有最小的体积和最轻的重量;(2) 要求传动机构具有较大的传动刚度,同时为了使整机的固有频率得到进一步提高,从而令整机的低频振动得到有效降低,要保证驱动器输出轴至连杆关节转轴的扭矩相同时,尽可能缩小其角度变形;(3) 要尽量降低传动机构的回差,即为进一步提高传动机构的位置控制精度,当电机由正转到反转时空行程要小;(4) 应尽量确保传动机构具有较长的寿命和较低的价格,以便保证企业的经济效益。
本四自由度工业机器人选取的电机为电机与齿轮轮系一体化设计,因而该电机具有紧凑的传动结构和极强的负载能力,然而却无法用电机对各个连杆的运动进行直接驱动。为了使机构运行过程中所受到的冲击与振动进一步减少,并使得其控制精度有效提高,本设计采用了齿形带传动形式。齿形带传动是同步带的一种,其作用主要是将回转运动转换成为直线运动,或者实现平行轴间运动的传递,其在该机械手中的功能主要是,实现腰关节、肩关节以及肘关节运动的传动。
4 制动器的设计
在机器人机构中,为防止遇上机器瞬间停止时需要及时采取安全措施而出现故障,或者当停电时有效预防运动部分下滑而给其他装置造成破坏,需要在机械中设置制动器。制动器的主要功能是将机械运动部分的能量转换成热能释放,进而降低机械运动速度或者直接使其停止,主要分为机械制动器和电气制动器,前者拥有螺旋式、闸瓦式、电磁式及盘式等多种,而其中电磁制动器的应用最为普遍。由于机器人多采取伺服电机作为驱动系统,而电磁制动器则为伺服电机中不可缺少的零件,该制动器又叫做无励磁动作型电磁制动器,只有当电源断开线圈中无励磁电流时,在弹簧力的作用下它才具有制动效果。而电气制动器则主要是用来将电能转换成机械能。
通过对工业机器人腰部、臂部、腕部等关键部位在多种工况下的静态分析可知,机器人机械手质量的增加容易对其工作效率带来影响,因此本四自由度工业机器人采取电气制动器而没有安装机械制动器。当其肘关节与肩关节停止转动时,由于重力作用而出现下落的现象,针对这种情况,为了在不增加驱动系统质量的情况下,确保其具有制动功能,本设计利用CAD/CAE集成软件对空间多关节机器人肘关节及肩关节的电气制动进行分析,从而有效避免安装机械制动器导致机械手质量增加的状况,有效确保该机械手原有的工作效率。这种四自由度平面关节装配机器人,属于精密型装配机器人,其优点包括高定位精度、高柔性以及较大的工作空间等。
5 结语
随着社会以及现代化技术的发展,工业企业为了有效提高自身产品的生产效率以及质量,十分重视生产过程的自动化程度,本文以一台四自由度的工业机器人设计为例,通过对其驱动方式、传动方式以及制动器设计的详细分析,得出该机器人属于精密型装配机器人,具有高定位精度、高柔性以及较大的工作空间等优点,近10年来其在焊接、搬运以及喷漆等方面得到了极为广泛的应用。
[1] 刘鑫.多自由度机械手臂鲁棒控制技术研究[D].南京理工大学,2008
[2] 赖文峰,赵兴龙.机器人在单元化生产中的应用设想[J].金属加工(冷加工),2013(20)
[3] 汪建华.平移—旋转结构机器人的定位和视觉跟踪控制研究[D].中国科学院自动化研究所,2008
2014-09-02
陆建荣(1979—),男,江苏南通人,硕士研究生,讲师,研究方向:机器人结构设计、运行控制。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
机电信息(2022年9期)2022-05-07
江苏安全生产(2021年9期)2021-11-27
物流技术与应用(2020年4期)2020-05-06
中国特种设备安全(2019年3期)2019-04-22
制造技术与机床(2018年11期)2018-11-23
中国自行车(2018年8期)2018-09-26
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
