
频率分析在扶梯调试中的应用
2014-09-01 09:20胡傲
机电信息 2014年9期
胡 傲
(广州奥的斯电梯有限公司,广东 广州 510425)
频率分析在扶梯调试中的应用
胡 傲
(广州奥的斯电梯有限公司,广东 广州 510425)
由于难以确定振动来源,目前工地现场对自动扶梯振动进行调试的工作效率并不高。现尝试使用频率分析的方法来确定自动扶梯的振动来源,并对所确认的振动来源进行有针对性的调整,以消除或减弱其影响,结果大大提高了自动扶梯振动调试的工作效率。
频率分析;自动扶梯;振动;调试
0 引言
随着生活水平的提高,人们在享受自动扶梯所带来的便利性的同时,也越来越强调乘坐的舒适性。作为自动扶梯乘坐舒适性的指标之一,梯级和扶手带的振动也日益引起人们的关注。但是在工地现场,因为难以确定振动的来源,对振动超标的自动扶梯进行调试并不是一件容易的工作。目前工地现场对于自动扶梯振动的调试往往依赖“经验+运气”的模式,即根据经验,逐一检查和调整可能导致振动超标的各个零部件,并反复进行测量,直到振动指标满足要求为止。这种方法效率很低,因为大量的时间被消耗在对振动源的盲目查找上。那么有没有一种可以提高自动扶梯振动调试效率的方法呢?笔者尝试使用频率分析的方法来确认自动扶梯的振动源,然后有针对性地进行调整,以消除或减弱其影响。
1 使用频率分析法对自动扶梯振动进行调试的原理
1.1 快速傅里叶变换(FFT)
使用频率分析法对自动扶梯的噪音振动进行分析,首先要将自动扶梯的振动数据转为频率谱图。这就需要使用快速傅里叶变换(FFT)的工具。FFT是1965年由J.W.库利和T.W.图基提出的。它是离散傅里叶变换的快速算法,可以将一个信号从时域变换到频域[1]。因此,使用FFT可以将振动信号的频率提取出来,并绘制成频率谱图。根据频率谱图,就有可能找出振动源。
1.2 自动扶梯零部件运动频率的计算
自动扶梯的振动是由自动扶梯各部件的运动导致,其振动频率与相应部件的运动频率相一致[2]。自动扶梯各部件的运动频率可以分为2类:旋转频率和多边形效应频率。
自动扶梯上有很多旋转部件,如主机马达、主驱动、扶手驱动、各种滚轮等。若由于某些原因,它们没有绕其圆心旋转,或其旋转圆周上有缺陷,就会导致自动扶梯产生与其旋转频率相一致的振动。旋转部件的旋转频率可用下式计算:
f=φ/60
式中,f为旋转部件的旋转频率(Hz);φ为旋转部件的旋转速度(r/min)。
自动扶梯上也有很多链轮,如主机链轮以及主驱动上的驱动链链轮、梯级链链轮和扶手驱动链链轮等。自动扶梯的多边形效应是指当这些链轮每转过一个齿时,相对应链条的速度都从大到小再从小到大变化一次的现象。多边形效应会导致自动扶梯的运行速度时快时慢,使乘客产生前后窜动的不适感。其频率与链轮的转速以及齿数有关,可用下式计算:
f=φ·n/60
式中,f为自动扶梯多边形效应的频率(Hz);φ为自动扶梯链轮的转速(r/min);n为自动扶梯链轮的齿数。
1.3 谐波
根据法国数学家傅里叶的发现,任何周期性重复的波形都可分解为基波和一系列为基波频率倍数的谐波的正弦波分量。自动扶梯的振动大多是周期性振动,因此除了频率与其运动频率相一致的基波外,还有一系列频率为基频整数倍的谐波。其中,频率为基频2倍的谐波叫2次谐波,频率为基频3倍的谐波叫3次谐波,依此类推。基波和谐波在频率谱图上表现出一系列等距分布的频率峰。图1就是一个典型的带谐波的频率谱图。
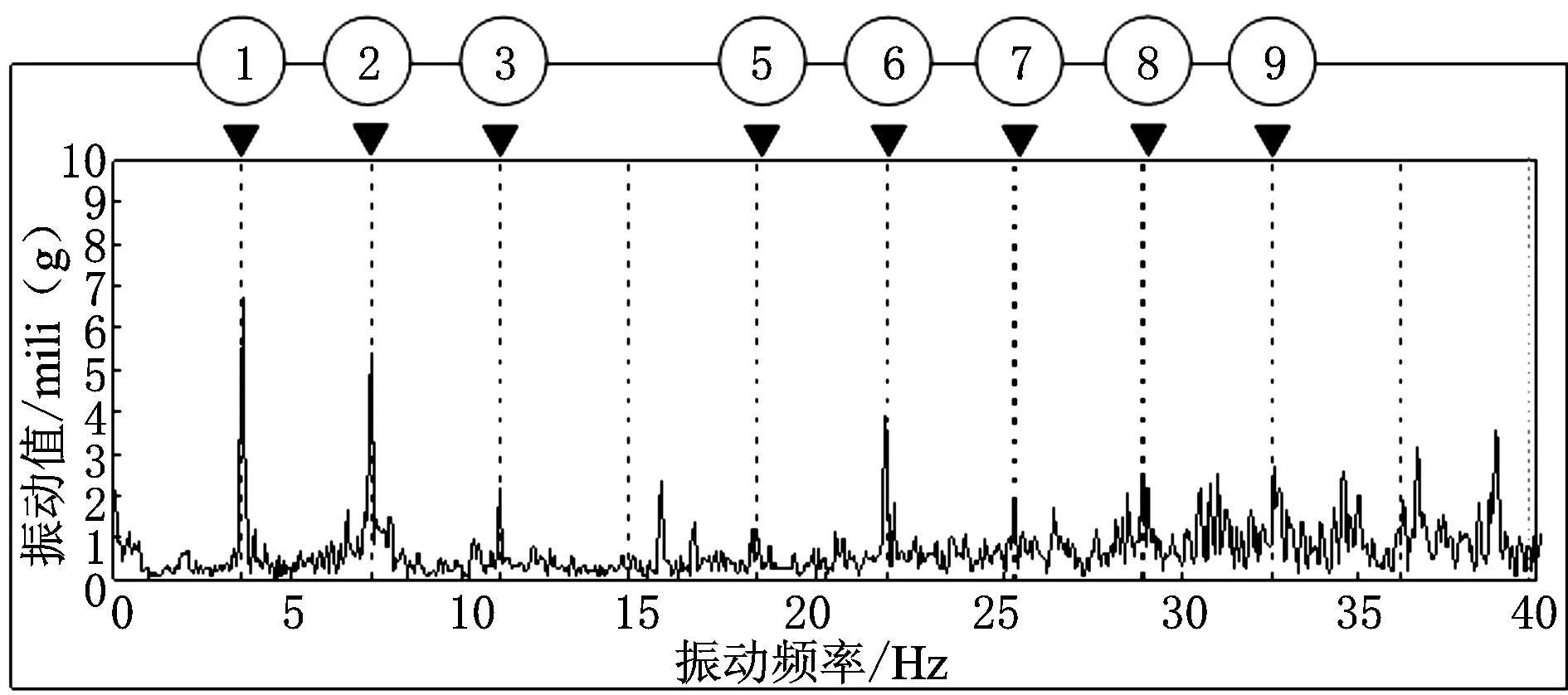
图1 带谐波的频率谱图
这是一个自动扶梯梯级振动的频率谱图,从中可以明显看到一系列等距分布的频率峰,这是由梯级链多边形效应所产生的。其中,最左侧的1号频率峰的频率与梯级链多边形效应的频率相一致,是基频峰,其余几个频率峰分别是2、3、5、6、7、8、9次谐波的频率峰。
2 使用频率分析法对自动扶梯振动进行调试的工程实例
我们使用频率分析法对一台振动超标的自动扶梯进行了调试,收到了很好的效果。表1是调试之前这台扶梯梯级和扶手带振动测量数据,测量工具是PMT。

表1 调试之前自动扶梯振动测量值 单位:mili(g)
可见,这台自动扶梯的梯级和右侧扶手带的振动都超出了允许值范围,需要进行调试。于是我们使用了频率分析的方法来进行这项工作。
2.1 各零部件所引起的扶梯振动频率的计算
我们收集了这台扶梯的一些参数(表2)作为各零部件运动频率计算的输入,这些参数可以方便地通过现场测量或查看设备铭牌得到。
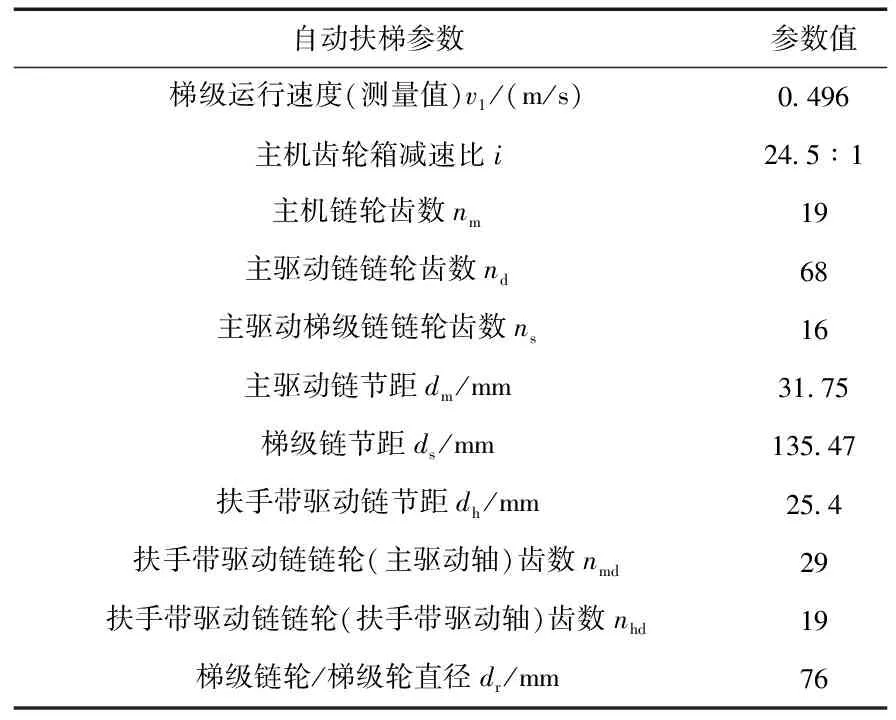
表2 待调试自动扶梯参数
根据表2所列的扶梯参数,我们计算出各零部件的运动频率,如表3所示。
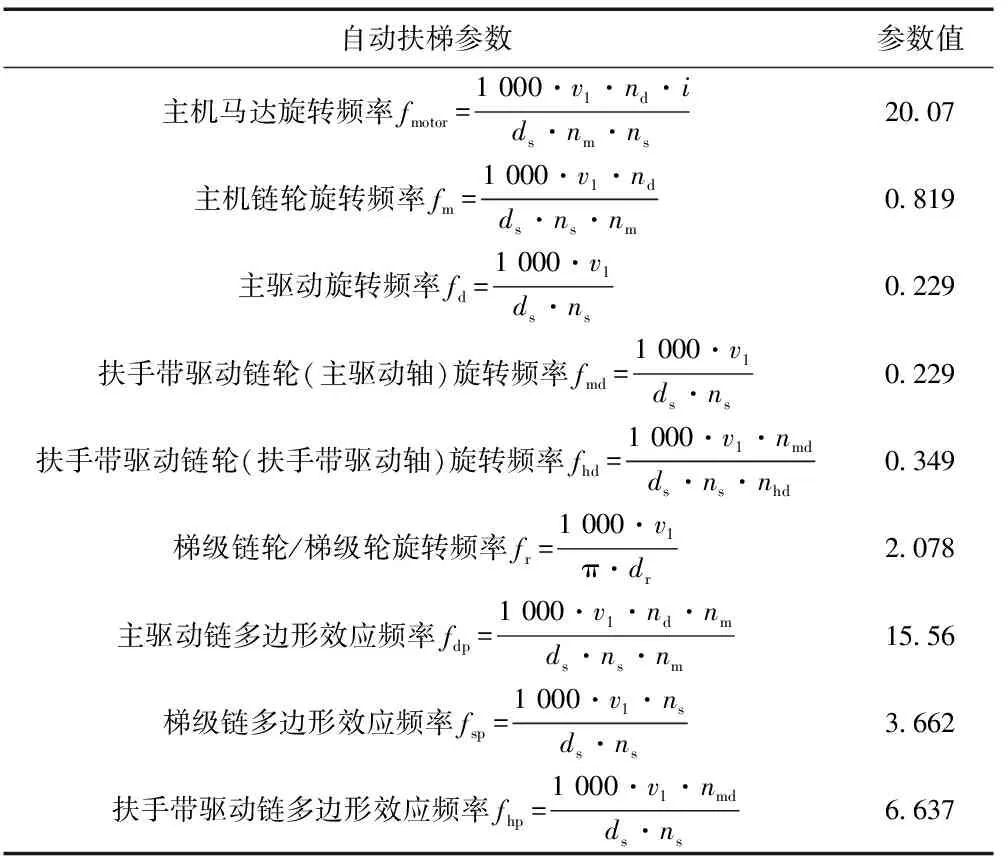
表3 自动扶梯各零部件运动频率的计算 单位:Hz
根据表3所列这台自动扶梯各零部件的运动频率,我们可以算出它们所引起的扶梯振动的频率,如表4所示。
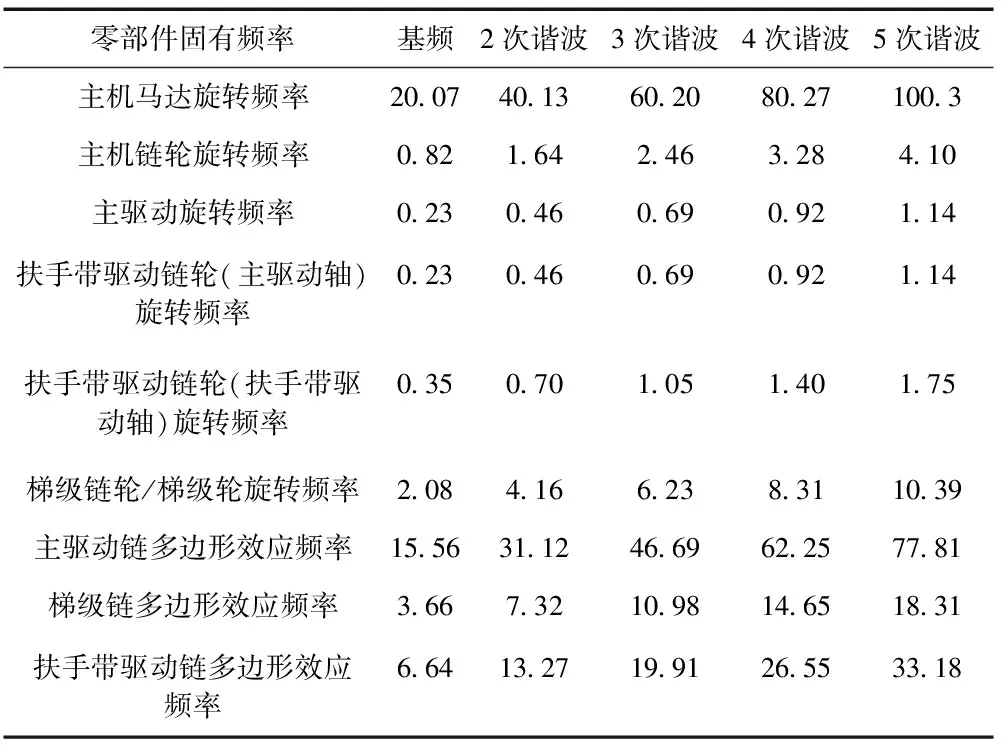
表4 由各零部件运动所引起的扶梯振动的频率 单位:Hz
2.2 扶梯振动频率谱图的绘制以及主要振动源的确定
在算出了各零部件运动所引起的扶梯振动频率后,我们使用Physical Measurement Technologies公司的EVA振动分析工具软件(版本号:8.7511)的FFT功能,对这台自动扶梯的梯级和右侧扶手带的振动频率谱图进行了绘制,并将其与该扶梯各零部件运动所引起的振动频率相比对,发现了与主驱动链、梯级链和扶手带驱动链多边形效应相对应的频率。这些都是扶梯运行所固有的正常频率。除此之外,还发现了一个7.78 Hz的未知频率。
经观察发现,这个未知频率刚好是主驱动链多边形效应所引起的振动频率15.56 Hz的1/2,于是我们怀疑这个未知频率与主驱动链有关。进一步检查发现,这台扶梯的主机安装时调整不到位,导致主驱动链与主机链轮在啮合的时候有刮擦现象。由于主驱动链是内—外链板交替排列的结构(图2),当主机安装位置不正确时,主驱动链的内链板就会与主机链轮发生刮擦。主驱动链上2个相邻内链板间的距离是主驱动链节距的2倍,而其对应的频率正好就是主驱动链多边形效应频率的1/2。因此我们可以认为,这个未知频率就是由于主驱动链与主机链轮的刮擦所导致的。这是扶梯不正常运行所导致的异常频率。
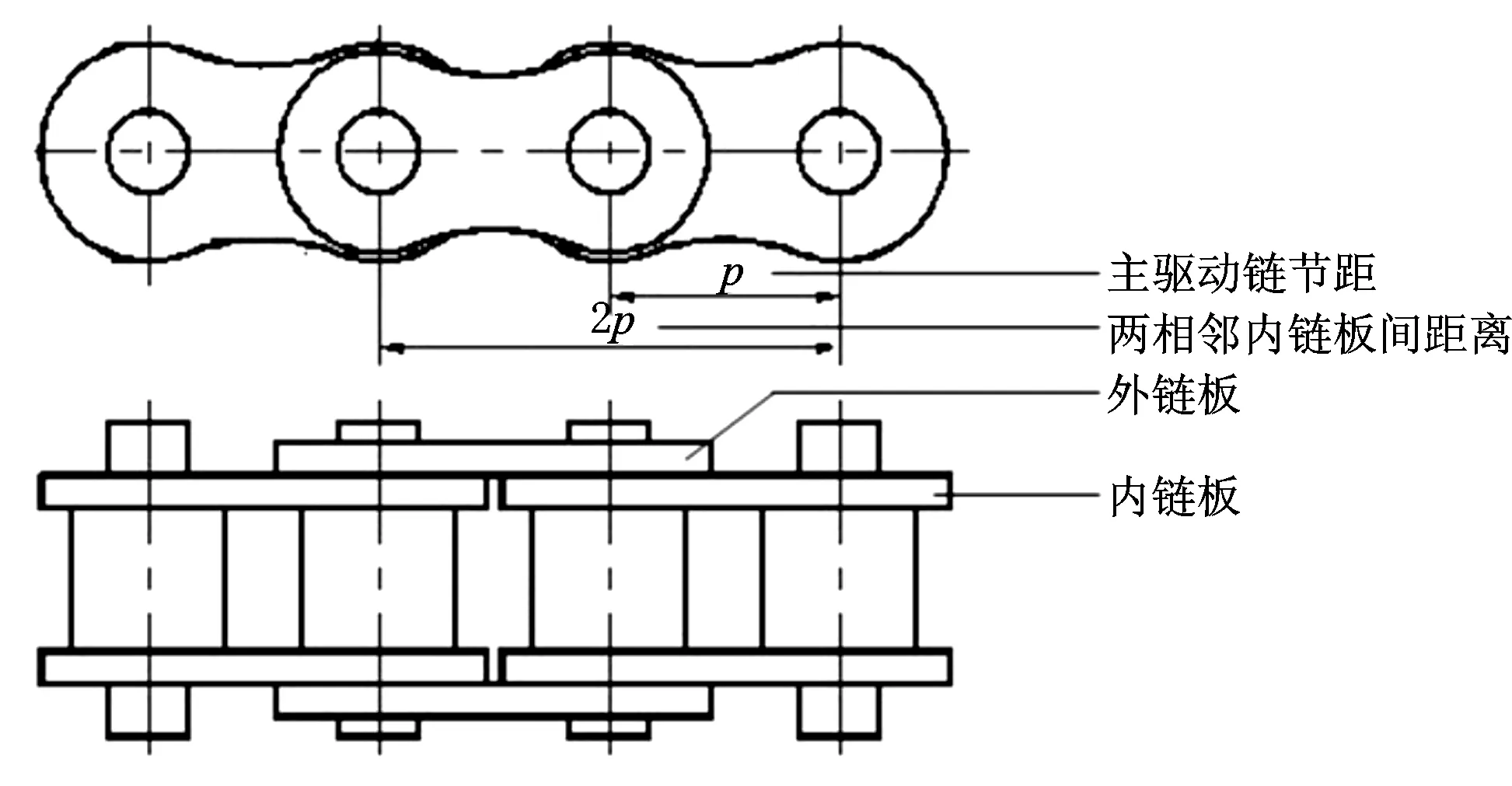
图2 主驱动链结构图
由此,我们确定了这台扶梯的4个主要振动源,分别是主驱动链的多边形效应、梯级链的多边形效应、扶手带驱动链的多边形效应以及主驱动链与主机链轮的刮擦,如图3所示。
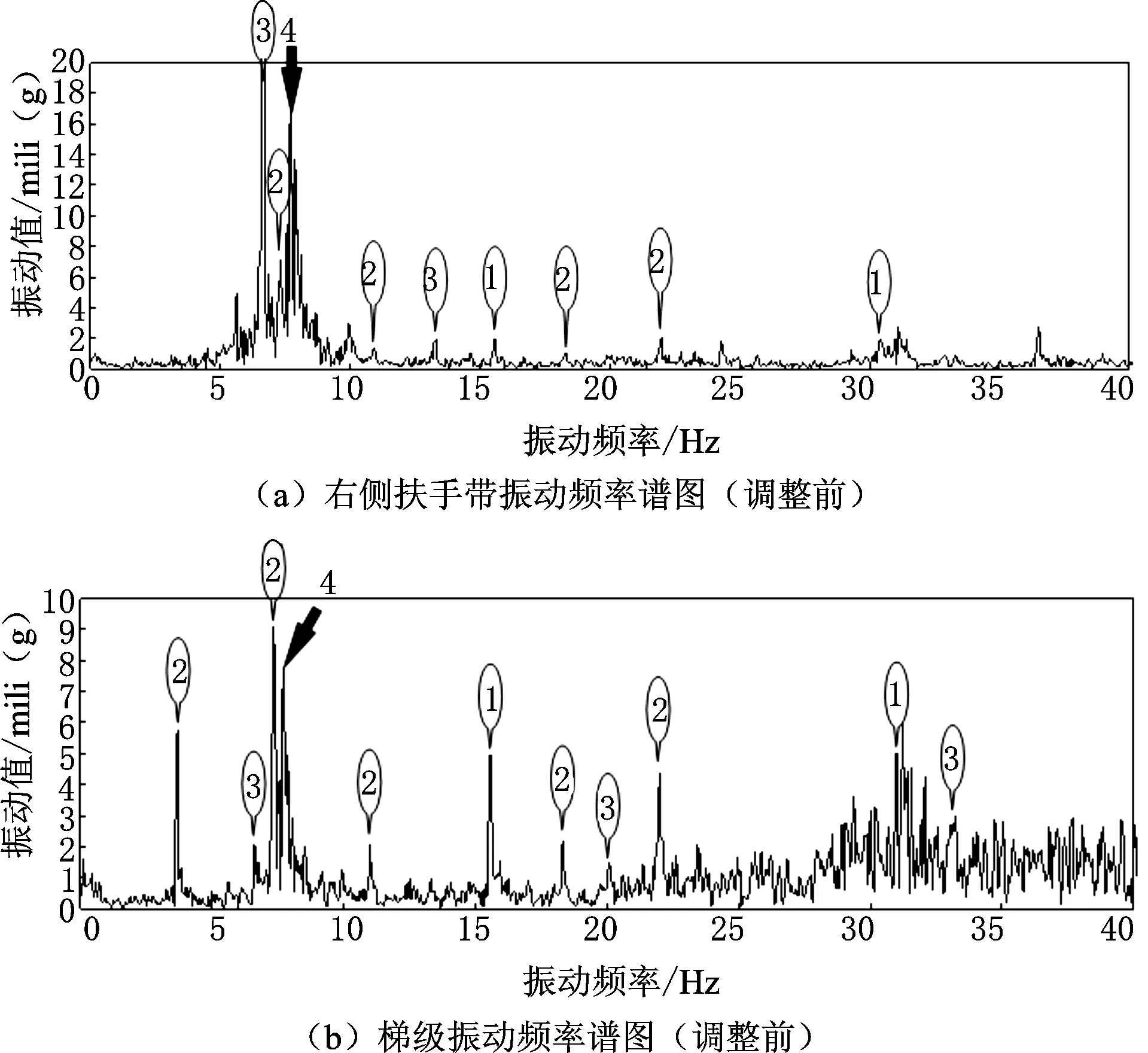
图3 待调试扶梯右侧扶手带和梯级振动频率谱图
从图3中各频率峰的峰高可以看出,梯级的振动受主驱动链和梯级链影响比较大,扶手带的振动受扶手带驱动链影响比较大,而主驱动链与主机链轮的刮擦对二者影响都很大。
2.3 对扶梯主要振动源的调整以及效果验证
从以上分析可见,这台扶梯存在的问题是主驱动链与主机链轮的刮擦,这是导致其振动超标的主要原因。只有消除了这个问题,才能使扶梯的振动符合要求。
因此,我们对主机的位置进行了调整,使主驱动链的张紧处于合适的状态,并且与主机链轮不存在刮擦。调整之后,我们重新测量了该扶梯的振动,结果如表5所示。
从表5可见,在调整了主机位置后,这台扶梯的振动有了明显的降低,达到了规定要求。为了进一步验证我们的调整措施是否成功地消除了7.78 Hz的不正常振动频率,我们绘制了调整后该扶梯右侧扶手带和梯级振动的频率谱图(图4),发现这个频率峰果然已经消失不见。
这证明我们之前对于导致这个频率的振动源的判断是正确的,并且调整措施是有效的。
3 结语
根据上文所述,我们可以看出,使用频率分析法可以准确地找到自动扶梯的振动源,有针对性地对其进行调整,可以大大提高对自动扶梯的调试效率。
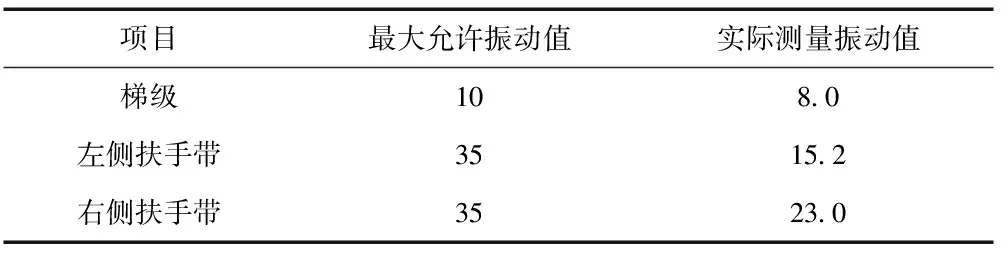
表5 调试之后自动扶梯振动测量值 单位:mili(g)
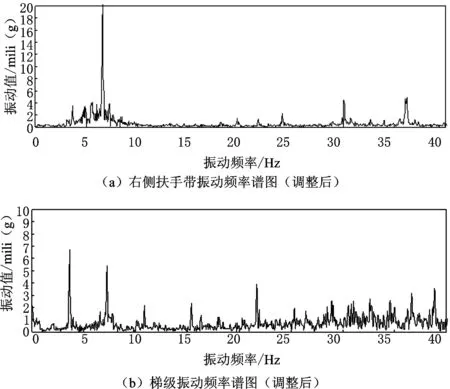
图4 调试后扶梯右侧扶手带和梯级振动频率谱图
[1]胡丽莹,肖蓬.快速傅里叶变换在频谱分析中的应用[J].福建师范大学学报:自然科学版,2011(7):27~30
[2]洪致育,谢明军,陈刚.舒适性——自动扶梯振动和噪声的测试与分析[J].振动与动态测试,1984(4):1~10
2014-03-07
胡傲(1979—),男,湖南长沙人,测试工程师,研究方向:自动扶梯认证测试。
猜你喜欢
思维与智慧·上半月(2022年4期)2022-04-08
小聪仔(幼儿版)(2020年12期)2020-02-01
中国特种设备安全(2019年3期)2019-04-22
小学生必读(中年级版)(2019年6期)2019-01-11
中国特种设备安全(2018年10期)2018-12-18
汽车零部件(2018年11期)2018-12-08
制造技术与机床(2017年11期)2017-12-18
好孩子画报(2016年6期)2016-05-14
文理导航·趣味课堂(2016年3期)2016-04-26
设备管理与维修(2016年7期)2016-04-23
