
一种利用matlab软件定位基底节脑出血穿刺点的方法
2014-09-01 01:44李滨董自平刘秋成闫丽红范振增王润辉雷学
河北医药 2014年13期
李滨 董自平 刘秋成 闫丽红 范振增 王润辉 雷学
·综述与讲座·
一种利用matlab软件定位基底节脑出血穿刺点的方法
李滨 董自平 刘秋成 闫丽红 范振增 王润辉 雷学
CT;MATLAB;脑出血;基底节区;定位;眶耳线;三维坐标,手术,穿刺,钻孔
基底节区脑出血目前是国内神经外科的常见病和多发病,占神经外科手术的相当大的比例,尤其是基层医院[1],而目前基底节区脑出血多数的手术方案为穿刺引流或穿刺抽吸术。该类手术的术前穿刺定位是手术成功的关键。如何精确的定位穿刺点,是大多数神经外科医生术前最为关心的一步[2]。目前精确定位的立体定向和三维立体定向均因各种因素,未能在此类手术得以推广,而目前的粗略估算方法容易产生较大误差,所以临床经常可以看到基底节区脑出血穿刺位置不理想的情况[3]。所以,神经外科手术目前迫切需要一种简单有效的脑出血穿刺定位方法。针对上述情况,本文利用CT工作站,获取部分体表标志和穿刺中心的三维坐标值,因为上述各点的实际三维空间关系固定,经过MATLAB的数学运算,得出以出血侧外耳门为原点,眶耳线为X轴的拟手术坐标系下的靶点新坐标数据,给手术穿刺定位提供参考方案。
1 实现原理
在脑出血手术前,神经外科医师面对患者头颅,其手术实际默认的穿刺坐标系如图1所示:
以病灶侧外耳孔为原点O,眶耳线为X轴,对侧外耳孔和X轴组成XOY平面,Y轴为该平面垂直于X轴,经过原点的垂线,Z轴为垂直于XOY平面且经过原点的垂线所构成的三维坐标系。该拟合手术的三维坐标系的缺点是眶耳线与X轴的关系,由于眶耳线是一条假想直线,向内倾斜,与纵裂不平行,实际是穿行于“皮肉之间”的假想直线,手术前画在患者皮肤上的眶耳线实际也是一条颧弓区近似直线,外眦区为弧形的曲线,经过测算,颧弓区的近似直线部分与纵裂平面基本平行,误差约为5%,所以我们需要对由外耳门和外眦点为X轴建立起的三维坐标系稍作旋转校正,使眶耳线平行于纵裂平面,这样坐标系才是符合临床医师思维和定位要求的坐标系,易于立体的把握靶点的位置。
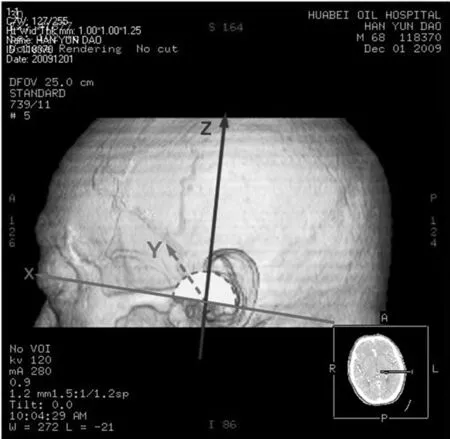
图1 手术坐标系
在已扫描的患者的CT数据中,患者的头部影像数据可以看做是一个矩阵,每个点都有固定的三维坐标值。这其中就包括我们手术所需的外耳门、外眦、血肿穿刺中心点、纵裂等各种数据。它们的具体的空间结构关系是固定的,只不过每个点的值无法直接为临床手术定位服务。若把原CT扫描的坐标系调整成为我们手术拟合的坐标系下,那穿刺点的三维坐标值会跟着变动,其新三维坐标值就是在手术坐标系下各象限的具体位置,定位会十分容易和准确[4]。
2 操作方法
2.1 各点的选择 从CT工作站获取出血侧外耳门、出血侧外眦、对侧外耳门、血肿穿刺中心点、纵裂的额部和枕部各随意两点。我院的CT工作站为GE公司的64排CT以及AW4.2,CT扫描厚度为5 mm,在工作站进行重建后,在立体位、水平位、矢状位和冠状位四种图像上互相参考,在其中获取出血侧外耳门、出血侧外眦、对侧外耳门、血肿穿刺中心点、纵裂的额部和枕部各随意两点(矫正用),每个点的坐标在四种图像上可相互参考和印证。各靶点选择时尽量在重建的冠状位和矢状位图或立体图像上选择,数据会更加准确。图像上的选择过程如下图2、3所示。

图2 外耳门和外眦点的选择

图3 血肿穿刺中心及纵裂的额、枕部各随意两点的选择示意图
将上述六个点的三维坐标记录下来。其坐标值为L(R),A(P),S(I),可以记录为L、A、S为正值,R、P、I为负值,分别对应记为X轴,Y轴,Z轴坐标。
2.2 坐标值的转化 将上述六点分别代入MATLAB的已编好的程序中,具体程序见下:
clear
format long
% 此处输入需要作为原点的点坐标(出血侧外耳门)
x1=*;
y1=*;
z1=*;
% 此处输入需要作为x轴上点的点坐标(外眦点)
x2=*;
y2=*;
z2=*;
% 此处输入需要作为xOy平面上点的点坐标(对侧外耳门)
x3=*;
y3=*;
z3=*;
% 此处输入需要作为任意点的点坐标(穿刺血肿中心点)
x4=*;
y4=*;
z4=*;
% 下面输入两个校正用的点坐标
% 注意第五个点和第六个点不要重合!
% 第五个点为点E(纵裂的额部点)
x5=*;
y5=*;
z5=*;
% 第六个点为点F(纵裂的枕部点)
x6=*;
y6=*;
z6=*;
% 待求点坐标
x=;
y=;
z=;
% 下面首先第一次坐标变换
A1=[x1,y1,z1];
B1=[x2,y2,z2];
C1=[x3,y3,z3];
D1=[x4,y4,z4];
AB2=(x2-x1)^2+(y2-y1)^2+(z2-z1)^2;
AC2=(x3-x1)^2+(y3-y1)^2+(z3-z1)^2;
BC2=(x2-x3)^2+(y2-y3)^2+(z2-z3)^2;
AD2=(x4-x1)^2+(y4-y1)^2+(z4-z1)^2;
BD2=(x4-x2)^2+(y4-y2)^2+(z4-z2)^2;
CD2=(x4-x3)^2+(y4-y3)^2+(z4-z3)^2;
x1p=0;
y1p=0;
z1p=0;
A2=[x1p,y1p,z1p];%第一个点在新坐标系下的三个坐标
x2p=sqrt(AB2);
y2p=0;
z2p=0;
B2=[x2p,y2p,z2p]; %第二个点在新坐标系下的三个坐标
x3p=(x2p^2-BC2+AC2)/2/x2p;
y3p=sqrt(BC2-(x3p-x2p)^2);
z3p=0;
C2=[x3p,y3p,z3p]; %第三个点在新坐标系下的三个坐标
x4p=(x2p^2+AD2-BD2)/2/x2p;
y4p=(x3p^2+y3p^2-2*x3p*x4p+AD2-CD2)/2/y3p;
if ((y2-y1)*(z3-z1)-(y3-y1)*(z2-z1))*(x4-x1)+((x3-x1)*(z2-z1)-(x2-x1)*(z3-z1))*(y4-y1)+((x2-x1)*(y3-y1)-(x3-x1)*(y2-y1))*(z4-z1)>0
z4p=sqrt(AD2-x4p^2-y4p^2);
else
z4p=-sqrt(AD2-x4p^2-y4p^2);
end
D2=[x4p,y4p,z4p]; %第四个点在新坐标系下的三个坐标
M(1:3,:)=[x1,y1,z1,zeros(1,6),1,0,0;zeros(1,3) x1,y1,z1,zeros(1,4),1,0;zeros(1,6),x1,y1,z1,0,0,1];
M(4:6,:)=[x2,y2,z2,zeros(1,6),1,0,0;zeros(1,3),x2,y2,z2,zeros(1,4),1,0;zeros(1,6),x2,y2,z2,0,0,1];
M(7:9,:)=[x3,y3,z3,zeros(1,6),1,0,0;zeros(1,3),x3,y3,z3,zeros(1,4),1,0;zeros(1,6),x3,y3,z3,0,0,1];
M(10:12,:)=[x4,y4,z4,zeros(1,6),1,0,0;zeros(1,3),x4,y4,z4,zeros(1,4),1,0;zeros(1,6),x4,y4,z4,0,0,1];
F=M^-1*[x1p;y1p;z1p;x2p;y2p;z2p;x3p;y3p;z3p;x4p;y4p;z4p];
%计算第五点在坐标系2下的坐标
x5p=[F(1) F(2) F(3)]*[x5;y5;z5]+F(10);
y5p=[F(4) F(5) F(6)]*[x5;y5;z5]+F(11);
z5p=[F(7) F(8) F(9)]*[x5;y5;z5]+F(12);
%计算第六点在坐标系2下的坐标
x6p=[F(1) F(2) F(3)]*[x6;y6;z6]+F(10);
y6p=[F(4) F(5) F(6)]*[x6;y6;z6]+F(11);
z6p=[F(7) F(8) F(9)]*[x6;y6;z6]+F(12);
% 下面第二次坐标变换
if (y5p==y6p && x5p==x6p)
'E、F点在xOy平面上的投影重合!
else
if x5p==x6p
thetapp=pi/2;
else
thetapp=atan(abs(y5p-y6p)/abs(x5p-x6p));
end
xp=[F(1) F(2) F(3)]*[x;y;z]+F(10);
yp=[F(4) F(5) F(6)]*[x;y;z]+F(11);
zp=[F(7) F(8) F(9)]*[x;y;z]+F(12);
thetap=acos(xp/sqrt(xp^2+yp^2));
% 输出x,y,z在第三个坐标系下的坐标
A1=[sqrt(xp^2+yp^2)*cos(thetap+thetapp) sqrt(xp^2+yp^2)*sin(thetap+thetapp) zp]
end[5-8]
2.3 运算结果 运算得出的穿刺中心的新坐标值数据(x,y,z)代表着该模拟手术坐标系下的穿刺点位于外耳门的前、上的位置,穿刺深度由于头颅皮肤的弧形结构和坐标系的直线结构的差别,误差不大,且由于穿刺深度可以直接在CT片子上直接量取,对穿刺定位基本没有影响。
将上述运算结果的数据运用于手术的基底节脑出血穿刺定位,均能准确定位。我院自2010年至2014年共运用此方法对基底节区脑出血穿刺引流的患者手术48例,所有患者体表定位后,手术均一次准确穿刺成功。
3 讨论
随着中国人口逐步步入老龄化,高血压脑出血的发患者数逐年增加[9],而脑出血本身是一种高致死率和高致残率的疾病,给国家、社会和家庭带来了沉重的负担[10]。脑出血的出血部位很多,其中基底节区部位的脑出血是最为常见的出血部位,占高血压脑出血的绝大部分,目前认为该部位的出血与豆纹动脉破裂出血相关[11]。脑出血后颅内很快形成血肿,颅内压增高,脑水肿,并且血肿和血浆引起的降解代谢产物对脑组织的毒性作用等原因,导致周围的脑组织发生坏死及海绵样变性等病理改变,产生不可逆的神经损害,并且随着时间的延长,产生的损害越严重[12]。手术的目的是尽快的降低颅内压,将颅内血肿清除出颅内,减少脑出血后对神经的损害,保留更多的神经功能,降低患者的致死率和致残率[13]。
目前对基底节区脑出血的治疗方法有保守治疗和手术治疗,目前神经外科认识趋于一致,对于基底节区出血量大于30 ml的患者,若无明显手术禁忌症的情况下,手术治疗的患者疗效较保守治疗的疗效好[14]。手术方法有开颅血肿清除和相对微创的穿刺抽吸或钻孔引流或钻孔后内镜下清除血肿两种方案,对于后者方案选择准确的穿刺或钻孔部位,为手术成功的关键。目前对脑出血定位较为精准的是立体定向手术和神经导航手术,立体定向手术操作过程需要给患者安装头架后,再次给患者行头CT扫描,选择穿刺靶点及入路,手术时间较长,且头架的安装也影响了手术操作的灵活性[15],而且目前国内多数立体定向头架与内镜系统兼容性差;神经导航也需要安装导航定位框,进行导航注册等,手术准备时间较长[16],并且目前多数医院,尤其是县市级的医院,由于这些设备价格昂贵,多数还不具备立体定向仪或神经导航的设备,所以目前国内多数的基底节区脑出血目前的主要微创手术方案仍是钻孔引流或穿刺碎吸引流。由于出血量超过30 ml,穿刺目标较大,目前手术定位多数医生仍是根据CT片,根据OM线,结合经验,粗略估计测量定位,由于患者的CT片头部偏斜,扫描时OM基线不准确,有时就会出现定位偏差的情况。为了相对准确定位,部分神经外科医生采取“CT颅表定位贴”“折耳法”“颅表金属标记物”“CT激光标记”或自制的体表定位标记物进行辅助定位[17],都能明显的提高定位的准确性。但都需要再对脑出血的患者进行一次颅脑CT扫描,既延长了抢救时间,增加了患者的途中风险,也增加了医疗费用。目前也有一些利用CT工作站,运用重建图像、透视等方法给术者提供更加直观的图像[18,19],但其实术者最主要需要的是穿刺部位的点在哪里。我们介绍的这种基于MATLAB软件的定位方案,不需要对患者进行额外的CT扫描,对CT扫描要求低,仅仅需要把患者第一次扫描的CT数据在工作站记录,代入我们编好的MATLAB程序,就可以得出穿刺点的体表定位数据,实际操作过程仅需数分钟就可以解决,非常适宜神经外科推广,尤其适用于广大基层医院使用。
MATLAB(矩阵实验室)是MATrix LABoratory的缩写,是一种用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境。除了矩阵运算、绘制函数/数据图像等常用功能外,MATLAB还可以用来创建用户界面及与调用其它语言(包括C,C++和FORTRAN)编写的程序。用户也可以将自己编写的实用程序导入到MATLAB函数库中方便自己以后调用。MATLAB的基本数据单位是矩阵,我们使用的CT影像可以认为是一个CT值的矩阵,其中每个值代表一个像素[20]。随着CT技术的发展和诊断要求的升级,影像质量越来越高,体素越来越小,一般的为0.001 mm3。运用MATLAB软件,模拟以OM线为基础的基底节脑出血的手术坐标系,获得穿刺的血肿部位的坐标值,可以直接得出模拟手术坐标系下的靶点数据。使用该方法需要注意以下问题:(1)除了定位血肿穿刺中心之外,也可以扩展到颅内病灶的上下前后各边缘,定位病灶的边界,在体表勾画出血肿范围,进行穿刺手术,可以比较灵活的选择穿刺点,避免穿刺点和颅内重要结构重叠,也可以开颅手术估计切开范围;(2)穿刺血肿的中心定位点确定后,穿刺的方向需按照手术坐标系的方向穿刺定位才准确,即垂直于矢状面进行穿刺,否则仍有穿刺偏斜的可能;为了避免手术时铺上无菌单后,对穿刺方向的把握,我们常增大颅脑体表的暴露范围,用透明无菌贴膜覆盖,增加穿刺方向感保证穿刺方向。(3)基底节脑出血多数的穿刺部位目前仍是经颞侧入路,该方案也是从颞侧入路,以OM线为基础考虑的,若为经额叶入路,需要重新选择不同的体表标志物,必要时需要在体表应用MARK进行辅助定位。(4)由于计算出的三维数值是根据手术需要构建的垂直三维坐标,在颅脑的顶部靶点体表投影测量上,需要注意头颅曲度变化带来的误差问题,对于多数脑出血的穿刺手术而言可以忽略不计,若需要提高精度,可使用一些简单的三维直角尺辅助。
1 王文志.中国脑血管病研究现状和发展方向.中国现代神经疾病杂志,2011,11:134-137.
2 刘维钦.脑-CT定位贴在微创基底节区血肿清除术的临床应用研究.广州:南方医科大学.
3 邵俊飞,主编.颅内病变精确定位与手术设计.北京:人民军医出版社,2005:1-19.
4 李滨,范振增.一种CT或MRI图像的矫正和靶点定位方法:中国,201010197045.4.2010.
5 Jiang Hsieh.张朝宗(译).计算机断层成像技术——CT原理、设计、伪像和最新进展.北京:科学出版社,2006.1-96.
6 李滨.外耳门与颅内外重要可视靶点的影像学关系的研究.河北医科大学学报,2010,31:27-30.
7 刘凤强,双靶点单通道穿刺角度深度计算法的修正与应用初探.中国微侵袭神经外科杂志,2007,12:403-405.
8 熊平,黎妲,徐平.一种基于Matlab的CT脑组织图像提取算法.生物医学工程学进展,2009,30:17-19.
9 杨俊峰,梁晓峰.中国国民脑血管疾病死亡分析.中国公共卫生,2003,19:718-719.
10 王梅 刘克军 王德江,等.中国脑出血疾病的直接费用负担现状及其问题.中国卫生经济 ,2005,24:43-46.
11 Sahni R,Weinberger J.Management of intracerebral hemorrhage.Vasc Health Risk Manag,2007,3:701-709.
12 Rincon F,Mayer SA.Novel therapies for intercerebral hemorrhage.Neuroscience,2004,10:94-100.
13 梁柱楼,陈学华,胡振华,等.不同手术方法治疗高血压脑出血的对照研究.中国当代医药,2012,19:41-42.
14 古增辉,刘艳,郑全芳,等.微创手术治疗重症高血压脑出血疗效分析.中国药物经济学,2014,7:268-269.
15 Shields CB,Friedman WA.The role of stereotactic technology in the management of intracerebral hemorrhage.Neurosurg clin N Am,1992,3:685-702.
16 Kim IS,Son BC,Lee SW,et al.Comparison of frame-based and frameless stereotactic hematoma puncture and subsequent fibrinolytic therapy for the treatment of supratentorial deep seated spontaneous intracerebral hemorrhage.Minim Invasive Neurosurg,2007,50:86-90.
17 刘维钦.脑-CT定位贴在微创基底节区血肿清除术的临床应用研究.南方医科大学学报,2010,30:919-920.
18 陈祎招,黄大勇,徐如祥,等.脑出血三维重建工作站辅助高血压脑出血内镜手术治疗.中华神经外科杂志,2012,28:240-244.
19 任雪会,何育涛.多层螺旋 CT三维重建技术在高血压脑出血微创术中的应用价值.河北医药,2013,35:3138-3139.
20 梁原.基于MATLAB的数字图像处理系统研究.长春,长春理工大学,2008.1-28.
10.3969/j.issn.1002-7386.2014.13.052
062552 河北省任丘市,华北油田公司总医院神经外科(李滨、董自平、刘秋成、闫丽红、王润辉、雷学);河北医科大学第二医院神经外科(范振增)
雷学,062552 华北油田公司总医院神经外科;
E-mail:libin982@chinaren.com.cn
R 651.1+1 ;R311
A
1002-7386(2014)13-2036-05
2014-01-10)
猜你喜欢
中老年保健(2021年3期)2021-12-03
老年医学研究(2021年6期)2021-03-09
中华养生保健(2020年10期)2021-01-18
中国生殖健康(2020年7期)2020-12-10
中外医疗(2015年18期)2016-01-04
转化医学电子杂志(2015年4期)2015-12-27
医学研究杂志(2015年7期)2015-06-22
中国当代医药(2015年33期)2015-03-01
科学中国人(2015年22期)2015-02-28
西南军医(2015年2期)2015-01-22
