
基于共轭包络的船舶锚唇曲面设计技术研究
2014-08-30 11:53王黎辉刘志强
江苏科技大学学报(自然科学版) 2014年4期
王黎辉, 周 杨, 刘志强
(江苏科技大学 机械工程学院,江苏镇江,212003)
基于共轭包络的船舶锚唇曲面设计技术研究
王黎辉, 周 杨, 刘志强
(江苏科技大学 机械工程学院,江苏镇江,212003)
为了改变锚唇曲面的传统设计方法,提出了一种新的设计思路.根据预期的拉锚时锚杆和锚爪与锚唇接触的运动轨迹,通过共轭包络原理推导出它们与锚唇接触处的曲面方程,利用MATLAB生成该曲面并获取其型值点,然后基于型值点完成整个锚唇曲面的设计.最后以30万吨超大型油轮的锚唇为例,利用该方法进行设计并验证其结果的有效性.
锚唇曲面; 型值点; 共轭包络
锚唇是锚设备的一个组成部分,以往是无足轻重的,常常被人们所忽视,在锚设备设计日趋标准化的今天,锚唇设计的成败,已成为整个锚设备使用性能好坏的重要标志[1].目前,锚唇曲面的设计并没有统一的标准,造船企业在很大程度上还是依靠设计人员的经验设计锚唇.先根据不同船型设计锚唇,然后根据设计方案制造木模,再根据木模拉锚试验的结果对锚唇形状进行修改.反复这一过程,直到获得理想的效果.每次调整设计,都必须重新制造木模,这个过程浪费了大量的人力、物力和时间,带来工作量的增加,降低了设计效率.为了解决以上问题,本文提出了一种基于共轭包络原理求解锚杆、锚爪与锚唇接触处的曲面,并获取该曲面上的型值点,以其型值点为基础设计锚唇,避免了多次制造木模的过程,提高了工作效率.
1 基于共轭包络的锚唇曲面设计
1.1 基本程序流程
锚唇曲面设计的基本流程见图1.利用该方法设计锚唇,最关键的是获取曲面上的型值点.在获得型值点后,利用软件设计应用程序.首先引入所有相关的类型库文件,然后在软件界面上创建相应的控件,设定属性,编写程序代码,用程序来调用CAD软件.
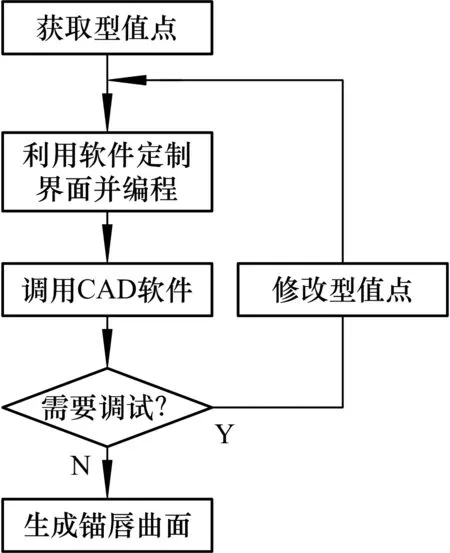
图1 锚唇曲面设计流程Fig.1 Design flow figure of anchor mouth surface
对于型值点而言,由参考文献[1-2]可知,锚唇表面存在经常接触点(图2).
以任一平面为参考平面,由图2可知,当锚链筒与船体表面的相贯线以及锚唇表面楔形外表面相切形成的曲线确定后,即可得到最低点C.取锚链筒内椭圆的短轴与相贯线交点中偏向船尾的A为起点,在0.618倍弧AC的长度处取B点.过点B作铅垂线与曲线交于D.B,D两点即为经常接触的型值点[2].由此便可将曲面上的型值点求解出来.
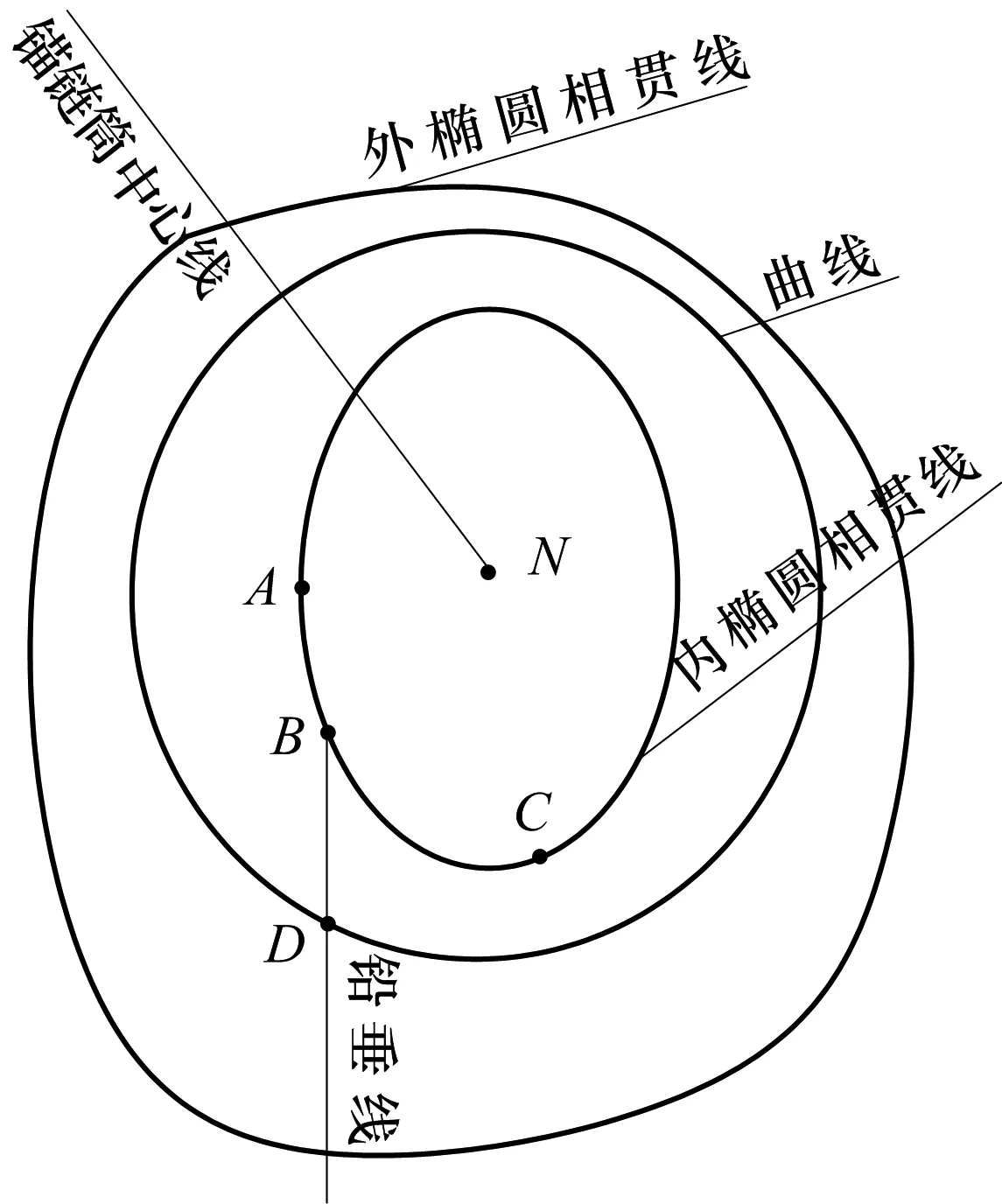
图2 经常接触点示意Fig.2 Figure of the contact points
1.2 求解锚杆及锚爪与锚唇接触处的型值点
共轭曲面是指机构中两构件上用以实现给定运动规律连续相切的一对曲面[3].它主要应用于机械设计和制造领域,如工具表面、啮合曲面以及轧钢辊面等.若已知一曲面Σ及V1(t),V2(t),便能求解出另一曲面的曲面形式.例如:建立两共轭曲面坐标系,确定共轭曲面运动之间的关系,可以得出s1→s2→s3之间的相互转换,最终可得到所求曲面[x,y,z]与已知曲面[x0,y0,z0]之间的关系[4].
在锚系运动过程中,锚杆及锚爪在各自阶段都会与锚唇进行接触运动,而且始终保持相切,利用共轭包络原理求出接触处的曲面,并获得相应的型值点.至于没有接触的曲面,只需要利用自然过渡的方式进行设计即可,因为此处曲面形状不会影响锚杆或锚爪的运动状态.
1.2.1 锚杆接触处型值点求解
通过锚系运动分析可知,在起锚阶段锚杆与锚唇进行接触运动.在此过程中锚杆作上升运动,同时作轴向回转运动的复合运动.整个运动过程中,锚杆始终保持与锚唇弧面相切.建立锚杆与锚唇接触的空间坐标系如图3所示,其中锚杆与锚唇曲面之间的夹角为θ,锚杆回转的角度设为k.则由坐标转换关系以及共轭包络原理可得[5-7]:
(1)
式中:A为空间坐标转换后得到的矩阵.
(2)

图3 锚杆与锚唇接触的空间坐标系Fig.3 Space coordinate system of anchor stockand anchor mouth
故锚唇曲面可表示为:
(3)
式中:x0=u,y0=ksin(0.2π)-60,z0=kcos(0.2π),表示锚杆的数学模型,利用MATLAB的图形处理功能,可以得到锚杆接触处的锚唇形状(图4).
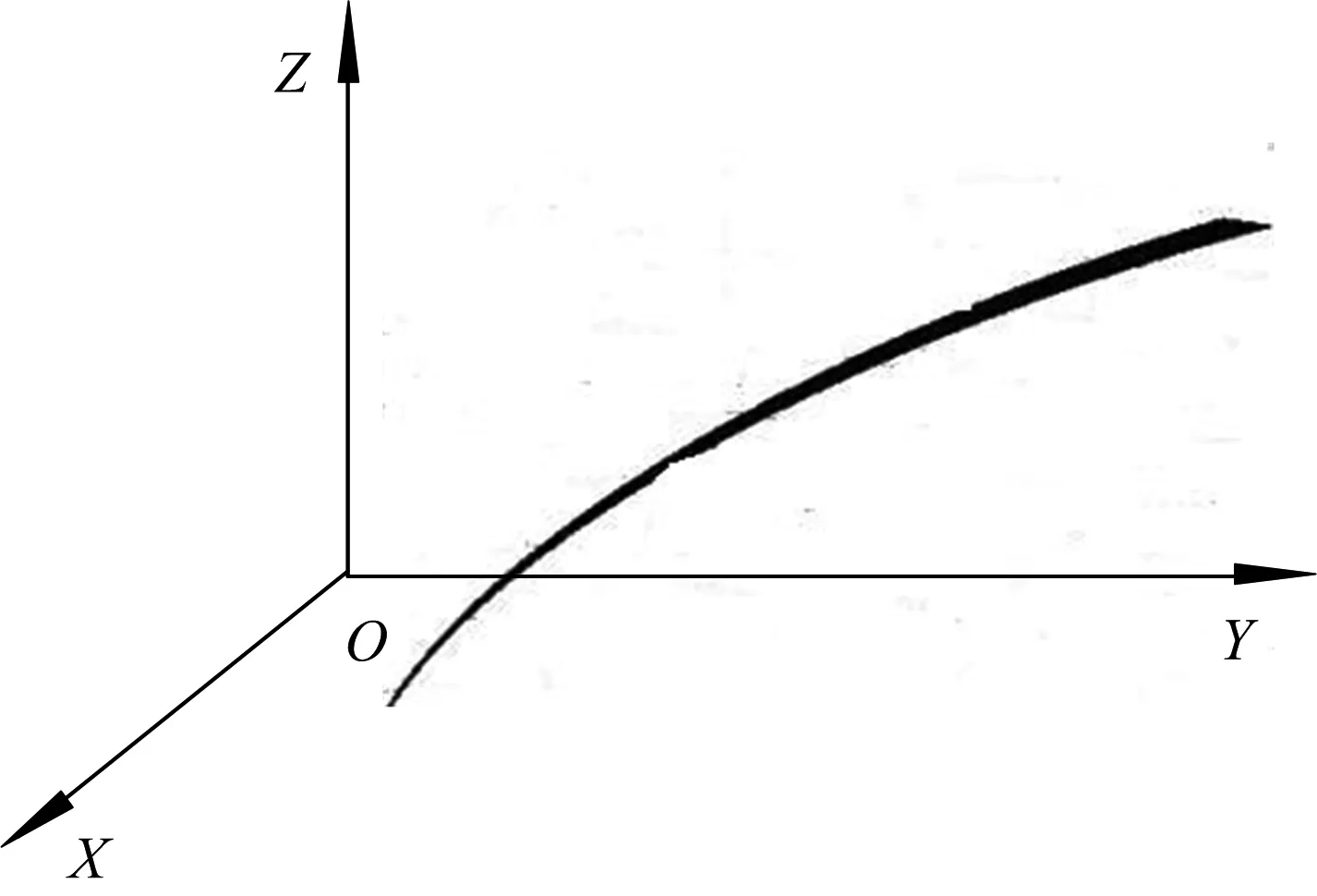
图4 锚杆接触处的曲面形状Fig.4 Anchor stock contact′s surface shape
求解出锚杆接触处的锚唇曲面方程之后,按其曲面形状建立锚杆接触轨迹.其轨迹方程可表示为:
(4)
式中:k为锚杆与锚唇接触的长度;t为其曲线的弯曲程度(用弧度表示).
经MATLAB处理,其结果如图5所示.
图5 锚杆运动轨迹Fig.5 Trajectory of anchor stock
求解锚唇曲面上的型值点,其实就是求解其锚杆运动轨迹上的型值点.获取空间曲线上的型值点有很多方法,文中将主要利用代码在MATLAB中获取,这样既便利又精确.在MATLAB中建立M文件,其内容为:
open(‘figname.fig’); % ‘figname.fig’是表示fig文件名;
h_line=get(gca,‘Children’); %其中gca表示返回当前axes对象的句柄值,而‘Children’表示控制axes对象的子对象,即imagelightlinepatch ectanglesurface和text等对象.
xdata=get(h-line,‘Xdata’);
ydata=get(h-line,‘Ydata’);
zdata=get(h-line,‘Zdata’);
保存M文件并运行即可得到一系列的型值点,将其型值点取整,如:(0,0,0),(21,20,12),(42,40,37),……
1.2.2 锚爪接触处的型值点求解
通过锚系运动可知,锚爪的翻身运动是一个复杂的运动过程,它同时作转动和类似于空间变半径圆周运动.锚爪与锚唇曲面进行翻身运动时,可以从左侧进行,也可以从右侧进行,最终完成贴合状态.现以一侧计算来说明锚爪与锚唇接触处的型值点求解过程.建立锚爪与锚唇接触空间坐标系如图6,其中以锚杆为支点转动的角度设为α,锚爪按照箭头指向作变半径圆周运动.构建锚爪的数学模型,将其设想为某一节不完整的螺旋运动,则锚爪空间运动的轨迹如图7所示,其数学模型可表示为:
x0=sint,y0=cost,z0=t,t⊂(0,π).由共轭包络理论及坐标转换关系可得:
(5)
式中:P为经锚爪转动和变半径圆周运动的坐标转换后得到的矩阵.
P=

(6)

图6 锚爪与锚唇接触空间坐标系Fig.6 Space coordinate system of anchor palm andanchor mouth
图7 锚爪空间运动轨迹Fig.7 Trajectory of anchor palm
由此可以得到锚爪接触处曲面方程为:
(7)
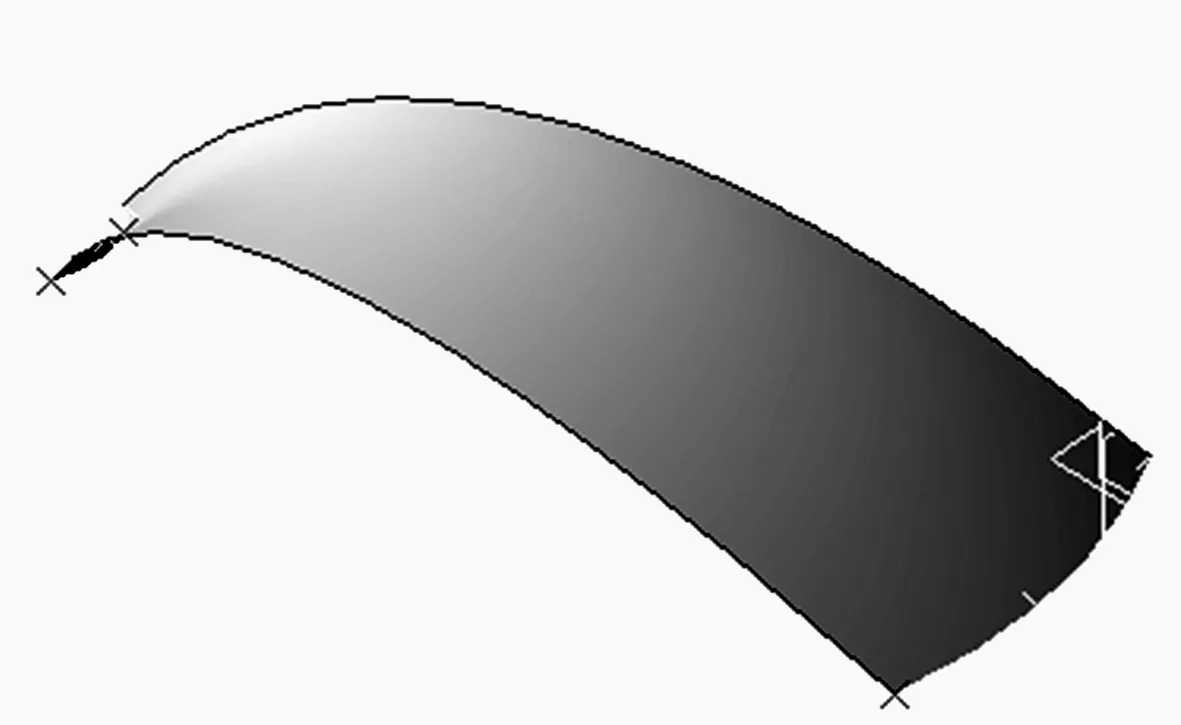
式中β为锚爪按照箭头运动的范围参数.当β取不同值时所对应的曲面形状也存在差异,以β为3π/4为例,得到锚爪与锚唇接触处的曲面形状如图8.
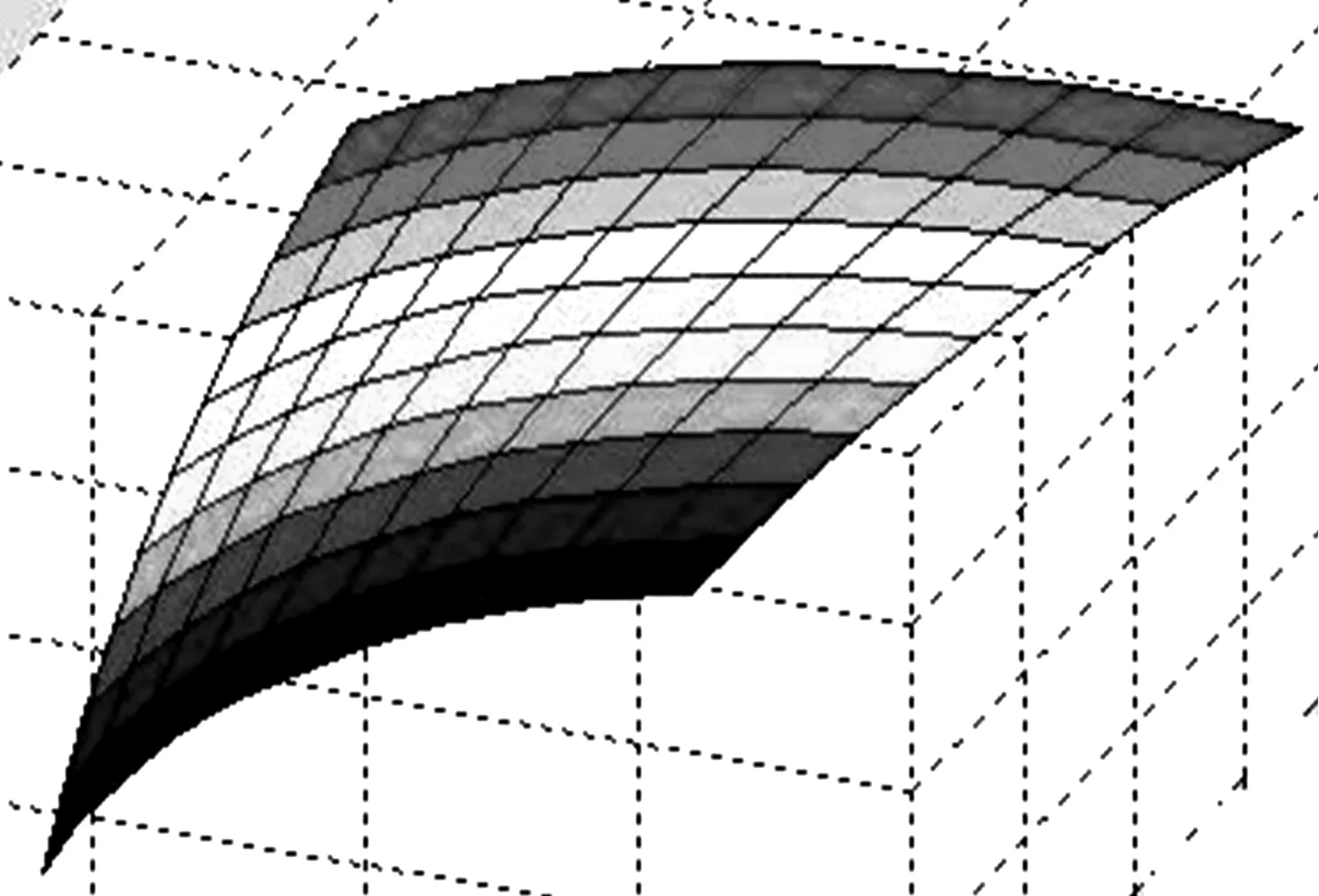
图8 锚爪与锚唇接触处的曲面形状Fig.8 Contact′s surface shape of anchor palm andanchor mouth
在求出锚爪接触处的锚唇曲面后,获得其曲面上的型值点比较困难.文中取曲面的某一方向,将其曲面沿此方向划分成若干等份的曲线,这样能够既便利又精确地获取曲面上的型值点.经MATLAB处理后其结果如图9所示.
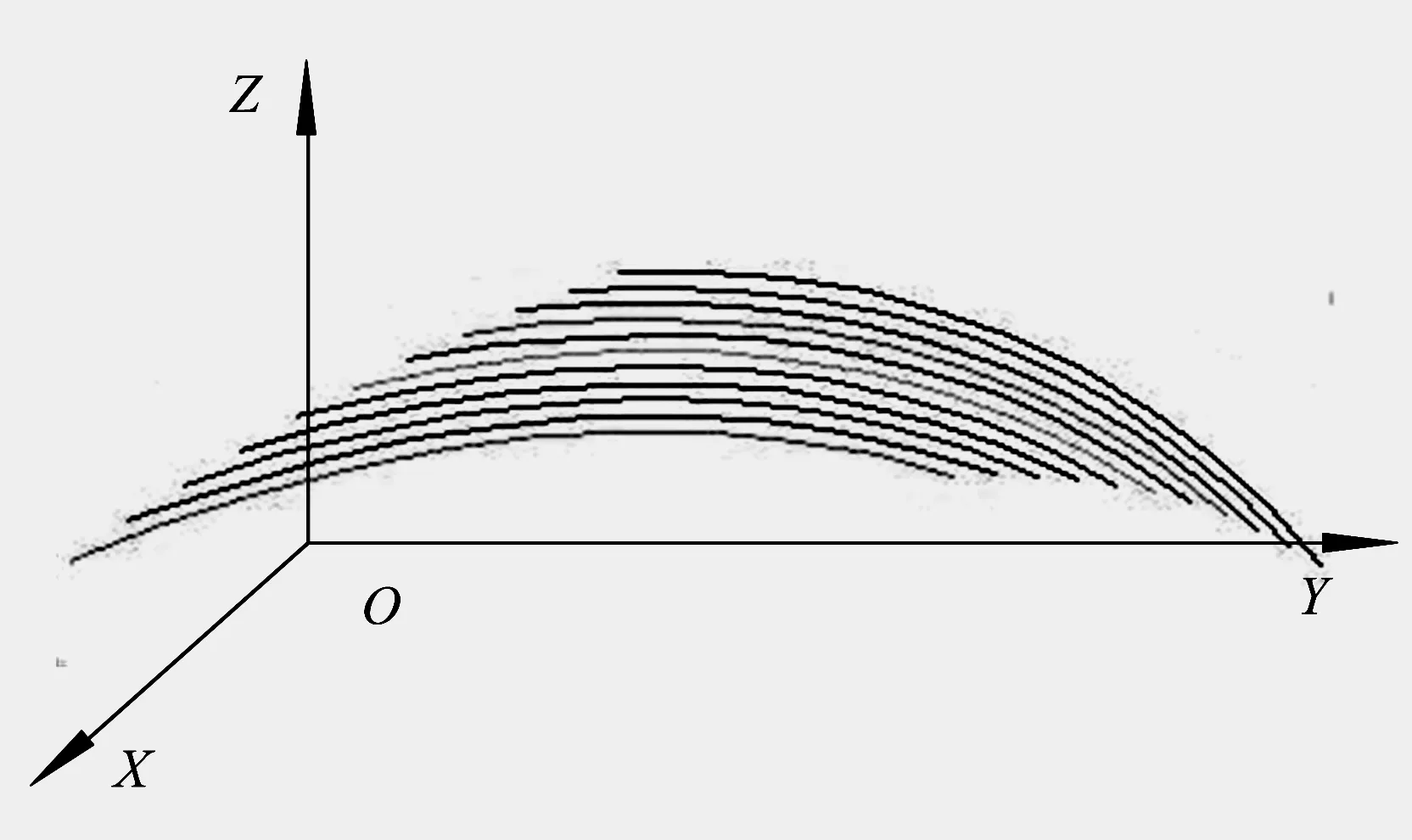
图9 曲面经MATLAB处理后的曲线Fig.9 Figure of curve treated with MATLAB
MATLAB中还有一种方法可获取型值点:人工手动函数法,就是在需要求解的曲线上,手动点击曲线上的点,即可获得其点的值.但它相比代码来获取型值点而言不够灵活.至于没有与锚杆或者锚爪接触的其他部分,采用自然过渡的方式进行设计即可.
2 锚唇曲面设计技术案例
2.1 VLCC的锚唇设计
以30万吨超大型油轮的锚唇为例,演示其基于共轭包络原理的方法设计锚唇.利用上文中介绍的方法求解出30万吨超大型油轮的锚唇曲面上的型值点为:(30,4,0),(43,-66,10),(43,-76,0),(17,5,0),(35,-77,0),(33,-80,0),(100,-75,0),(54,-15,20)等,且锚杆接触处的锚唇曲面的曲率较大,弯曲程度较小,而锚爪接触处的锚唇曲面曲率较小,弯曲程度较大.其结果如图10所示.图10a),b)中显亮的点即为部分型值点.
a) 锚杆接触处
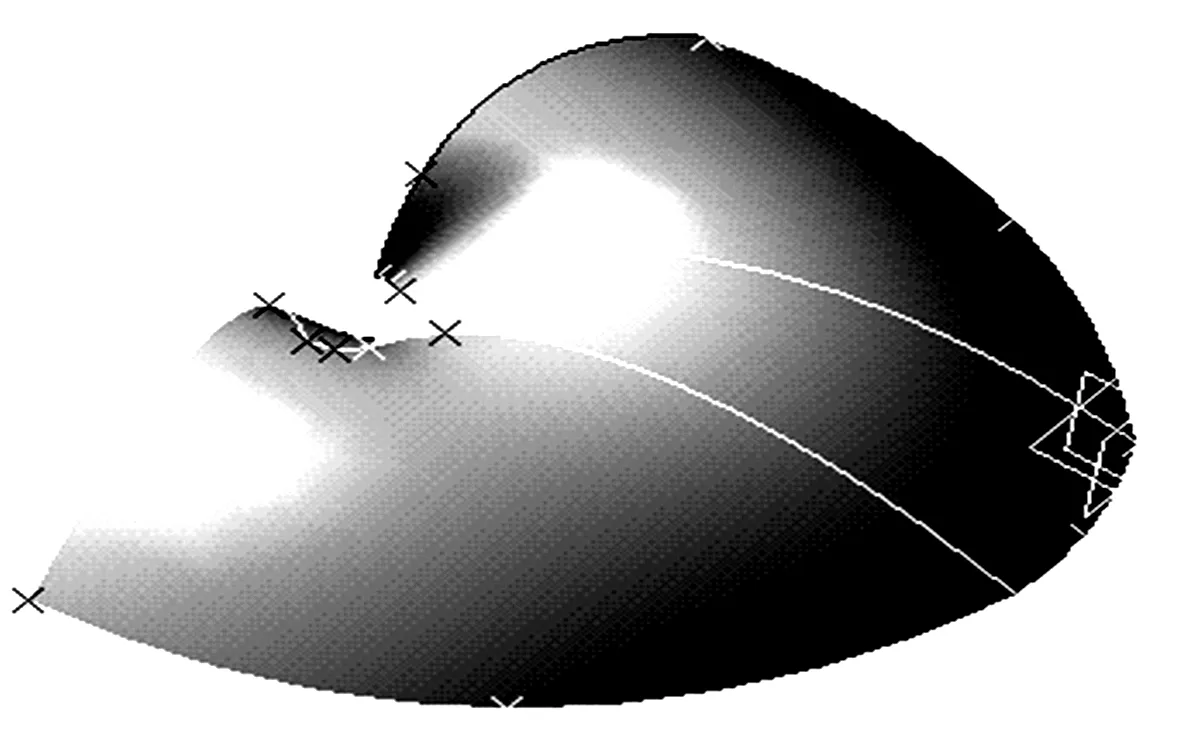
b) 锚爪接触处
c) 设计效果
2.2 锚唇贴合仿真试验结果分析
拉锚试验运动仿真的主要目的是验证锚唇曲面设计的是否合理,能否满足设计者的要求.运动仿真主要分为两个部分:①检测起锚后锚在上升过程中是否与船体发生碰撞;②检测锚在收紧后能否与锚唇很好地贴合,以避免船舶在运动过程中产生晃动和碰撞,称之为锚唇贴合仿真检测[8-10].
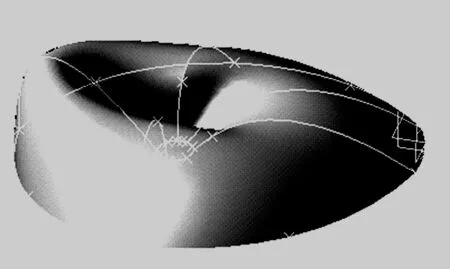
本次主要针对锚唇贴合仿真进行验证分析,检测锚唇曲面设计是否合理.假设初始位置在锚杆将要进入锚链筒的瞬间,终止位置在锚爪与锚唇贴合运动停止时的位置.图11为利用UG/MOTION运动仿真得到的最后贴合状态图.

a) 侧面 b) 正面
从图上可以看出,锚爪与锚唇能够很好地贴合,并且在运动过程中能够真实地呈现出实际起锚到最终贴合的整个运动过程.同时,在接近贴合的时候,能够仿真出锚爪翻身运动的功能.如果锚唇曲面设计的不好,则会影响锚的贴合运动,出现贴合状态不符合等现象.由图11可以得出,基于共轭包络原理设计的锚唇曲面能够达到设计者的要求.
3 结论
基于共轭包络原理求解出锚杆、锚爪与锚唇接触处的曲面,并获取该曲面上的型值点.然后以其型值点为基础,利用CAD软件的二次开发技术对锚唇曲面进行设计.最后以30万吨超大油轮锚唇为例进行锚唇设计并通过贴合状态来验证和分析其设计结果.通过对锚唇设计结果的分析验证,其结果能够满足设计者的基本需求.此方法大大提高了锚唇曲面设计的效率,并且还能够节约成本和资源,同时也为锚唇设计提供了一种新思路.
References)
[1] 凌世豪. 船舶锚唇设计[M].北京: 国防工业出版社, 1979:2-8.
[2] 张国震. 关于锚唇的数学力学模型[J]. 中国造船,1982(4):68-69. Zhang Guozheng.The math-mechanical model of shell flange of hawse-pipe[J].ShipBuildingofChina,1982(4):68-69.(in Chinese)
[3] 陈志新. 共轭曲面原理基础[M]. 北京:科学出版社,1985:78-82.
[4] 葛正浩,蔡小霞,王月新,等.应用包络面理论建立弧面凸轮廓面方程[J].机械设计.2004(2):27-28. Ge Zhenghao,Cai Xiaoxia,Wang Yuexin,et al.Build up profile equations of arc-surfaced cam with the application of envecope theory[J].JournalofMachineDesign,2004(2):27-28. (in Chinese)
[5] 马香峰.确定共轭曲面的方法及其应用[M].北京:机械工业出版社,1989:81-83.
[6] 李瑰贤.空间几何建模及工程应用[M].北京:高等教育出版社,2007:11-13.
[7] 肖来元,廖道训,易传云.共轭曲面求解理论与方法研究[J].机械科学与技术.2008(5):346-347. Xiao Laiyuan,Liao Daoxun,Yi Chuanyun. An overview of the theory and method on the conjugate surface design[J].MechanicalScienceandTechnology,2008(5):346-347.(in Chinese)
[8] 李纯金,刘志强,王明强, 等.基于虚拟样机技术的VLCC锚系运动仿真研究[J].船舶工程.2008,30(6):36-37. Li Chunjin,Liu Zhiqiang,Wang Mingqiang,et al.Study on the anchor motion simulation of VLCC based on virtual prototype[J].ShipEngineering,2008,30(6):36-37.(in Chinese)
[9] 邱小虎,王明强,刘志强,等.57000吨级散货船锚唇设计及拉锚试验仿真分析[J].造船技术,2005(2):19-20.
[10] 刘贵杰,王猛,张兰昌,等.船舶锚系三维建模及拉锚试验的仿真分析[J].船舶工程,2009,31(3):24-26. Liu Guijie,Wang Meng,Zhang Lanchang,et al.Simulation analysis of three-dimensional modeling and cat anchor test for ship anchor system[J].ShipEngineering,2009,31(3):24-26.(in Chinese)
(责任编辑:贡洪殿)
Technologybasedontheconjugateenvelopeoftheship′sanchormouthsurfacedesign
Wang Lihui, Zhou Yang, Liu Zhiqiang
(School of Mechanical Engineering,Jiangsu University of Science and Technology,Jiangsu Zhenjiang 212003,China)
This paper proposes a new kind of design to change the traditional design method of anchor mouth surface. Curved surface equation is derived by the conjugate envelope theory according to anchor stock motion track relative to anchor palm and anchor mouth. Surface shape points are obtained by use of MATLAB software and the anchor mouth surface design is finished. Finally, an example of the VLCC′s anchor mouth design is given to verify the result.
anchor mouth surface; data points; conjugate envelope
10.3969/j.issn.1673-4807.2014.04.004
2014-04-15
王黎辉(1969—),男,副教授,研究方向为现代设计理论及方法.E-mail:wang_lh@sian.com
U662.3
A
1673-4807(2014)04-0321-05
猜你喜欢
山东冶金(2022年1期)2022-04-19
数学物理学报(2022年1期)2022-03-16
数学物理学报(2021年6期)2021-12-21
河北理科教学研究(2020年1期)2020-07-24
应用数学(2020年2期)2020-06-24
山东冶金(2019年1期)2019-03-30
数学年刊A辑(中文版)(2019年1期)2019-01-31
数学物理学报(2018年5期)2018-11-16
浙江大学学报(工学版)(2016年10期)2016-06-05
工程建设与设计(2016年4期)2016-02-27
