支持多串口同时抄表的智能仪表程序设计*
2014-08-27 08:34:30同晓荣
单片机与嵌入式系统应用 2014年3期
同晓荣
(渭南师范学院数学与信息科学学院,渭南714000)
引 言
随着计算机技术、通信技术、电子技术的发展,推动了仪表行业快速发展;同时,随着人力成本的增加,人工抄表将会逐渐被淘汰;智能仪表将成为仪表行业发展的方向[1-3]。可以预见,在未来20年仪表行业将经历一次革命,我国将由目前的人工抄表方式逐渐转变为远程抄表,各级水、气和电力管理部门可以根据不同的权限对同一块仪表进行远程抄读。为了支持多用户同时抄表,本文设计了一种支持多串口同时抄读的智能仪表程序,对程序设计流程做了详细的阐述[4-5]。
1 支持多串口智能仪表软件构架
支持多串口智能仪表软件构架如图1所示,支持多串口智能仪表的软件构架分为4层:驱动层、基于任务调度的操作系统、通信协议层和应用层。驱动层主要提供智能仪表的各种硬件驱动。其中,串口驱动程序实现的功能包括:串口的配置、提供通信协议在串口发送列表和串口接收列表中注册的接口函数、为通信协议层提供数据服务。基于任务调度的操作系统的设计可以提高程序的通用性和扩展性;通信协议层和应用层根据需要在操作系统中注册任务,如果以后需要增加一个功能,则可以直接增加一个任务而不需要对以前的代码进行改动[6-9]。
通信协议层主要对从物理层接收的数据帧和命令帧,按照通信协议的帧格式进行解析和对从应用层接收到的数据和命令按照通信协议的帧格式进行组帧。应用层主要实现智能电表和抄表客户端应用对象之间的通信[10]。支持多协议的智能仪表软件构架如图1所示。
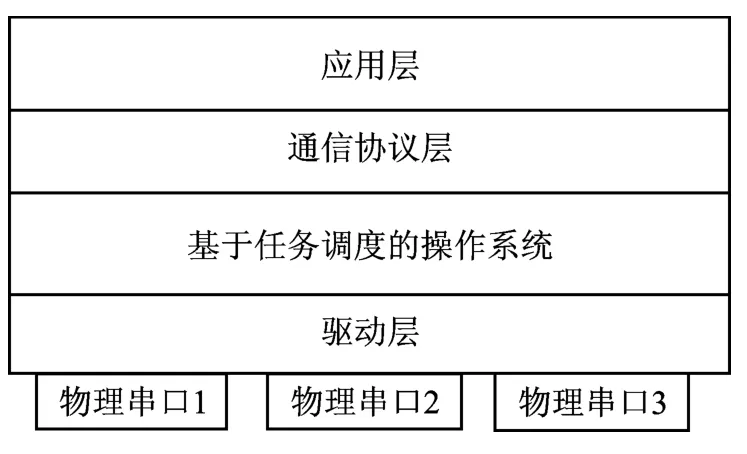
图1 支持多协议的智能仪表软件构架
2 驱动层串口程序设计
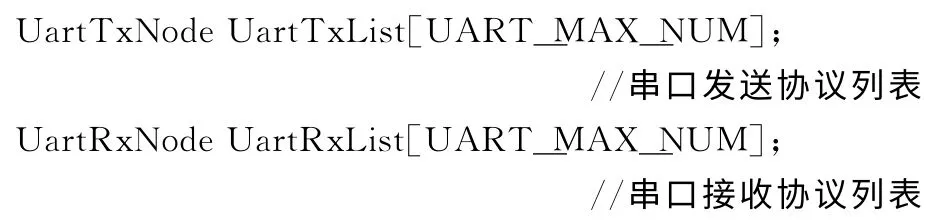
通信协议层系统初始化时,通信协议需要在每个串口的发送列表和接收列表中注册。其中,串口发送协议列表和串口接收协议列表如下所示:
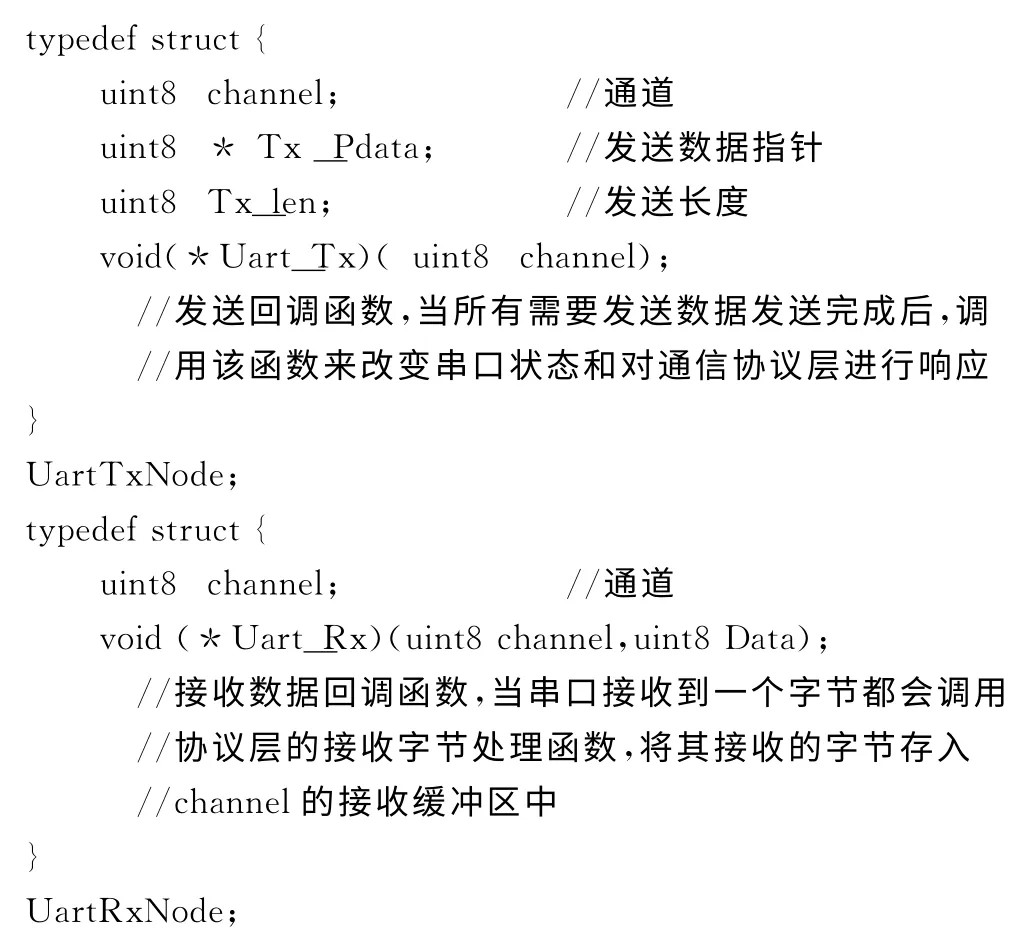
其中UartTxNode的结构体如下所示:
3 协议层和应用层程序设计
在通信协议层定义一个类型为PROTOCOL 的数组ProtocolPortList,ProtocolPortList数组的主要作用是:存放对应串口接收的数据和要发送的数据、表征该串口目前的状态。代码如下:
RxBuff是用来存放从串口接收的数据,TxBuff为要发送的数据,如果接收到一帧合法数据将ReceiveSuccess-Flag置0xFF,该标志的作用是为操作系统提供一个处理RxBuff中数据的标志,防止已经接收的帧被后续帧覆盖。RxLen为RxBuff接收字节的长度,TxLen为TxBuff要发送数据的长度。
3.1 接收回调函数程序设计
当串口接收到一个字节后调用接收回调函数,接收数据回调函数数据处理流程图如图2所示。首先判断返回的channel是否为物理通道1、物理通道2或物理通道3。如果不是则将此数据抛弃,如果是则判断ProtocolList[channel].ReceiveSuccesFlag是否为0xFF。如果是,说明该串口已经接收到一帧数据但还没有被处理,不能接收数据。如果不是,则判断接收字节是否符合通信协议的帧格式,如果不符合则将接收字节抛弃,如果符合将接收字节Data存入接收缓冲区ProtocolList[channel].RxBuff中,并且将接收长度ProtocolList[channel].RxLen加1,最后判断是否一帧数据接收完毕,如果接收完成则将ProtocolList[channel].ReceiveSuccesFlag置为0xFF。

图2 接收回调函数数据处理流程图
3.2 消息格式
在应用层和通信协议层中都有一个消息列表,分别来收集协议栈发送给它的消息和应用层发送给通信协议层的消息。
Message MessageList[MAX_MESSAGE_NUM];
其中Message的结构如下所示:
通道号为协议栈接收数据的串口号,STaskID 为源任务号(协议栈的任务号或应用层的任务号),DTaskID为目的任务ID(协议栈的任务号或应用层的任务号),MessageType代表什么类型的消息(读数据请求、写数据请求),Data为所要写入数据的指针。
3.3 基于任务调度的操作系统对接收帧的处理
当基于任务调度的操作系统执行通信协议层任务时会搜索ProtocolList 数组中哪个元素的ProtocolList[channel].ReceiveSuccesFlag为0xFF,然后对其Protocol-List[channel].RxBuff中的数据进行处理,处理过程是:
①首先按照通信协议层的帧格式对接收数据进行解析。
②解析出需要发往应用层的数据,按一定的消息格式(包含发送数据和通道号)组成一条消息,然后将其发送给应用层,应用层收到这个消息后将其存入AMessage-List应用层消息列表中。
当处理完成后将ProtocolList[channel].RxLen置0,将ProtocolList[channel].ReceiveSuccessFlag置0,以便于该channel串口通道可以接收下一帧数据。
基于任务调度的操作系统会按一定的调度时间来搜索ProtocolList中各个串口通道是否接收到一个完整的帧并进行处理,这样就能够实现协议栈对多个串口接收到的数据帧进行及时处理,多串口同时进行通信。
基于任务调度的操作系统会按一定的调度时间来搜索AMessageList是否为空,如果不为空则对相应的消息进行处理,这样就能够实现应用层对收到的多个消息进行及时处理,实现并行通信。
3.4 协议层对从应用层接收到的消息处理
智能仪表需要向客户机返回抄读数据时,首先智能仪表应用层将抄读数据按照一定的消息格式组成一条消息,然后将该消息发送给通信协议层。通信协议层收到该消息后将其存入PMessageList协议层消息列表中。
基于任务调度的操作系统会按一定的调度时间来搜索PMessageList是否为空,如果不为空则对相应的消息进行处理。
通信协议层对消息的处理过程如下:
①通信协议层将消息进行解析,解析出发送的Data和发送通道channel。
②将需要发送的数据按照通信协议的帧格式进行组帧,并存储于ProtocolList[channel].TxBuff中。ProtocolList[channel].TxLen为需要发送的长度。
③调用串口发送函数,将该帧数据通过串口channel发送出去。
3.5 发送回调函数程序设计
当channel的串口将协议层数据帧发送出去后会调用发送回调函数将ProtocolList[channel].TxLen置为0。
结 语
本文根据智能仪表的发展方向和多用户同时抄表的需求,阐述了设计支持多串口同时抄表的智能仪表程序的必要性。给出了支持多串口同时抄表的智能仪表软件构架、驱动层程序设计、通信协议层程序设计和应用层程序设计。它可以使多个抄表部门根据各自的权限同时对同一块仪表进行抄读和设置。该设计可以广泛地应用于智能仪表行业,从而推动我国仪表行业的发展和国际化。
[1]赵凯.基于ARM 的智能仪表设计与开发[D].北京:中国石油大学,2010.
[2]翟勇.基于AT89S52的多软串口通信系统[D].天津:天津大学,2007.
[3]牛昱光,崔正文.多现场总线接口智能仪表设计[J].电子技术应用,2011,37(8):131-134.
[4]黄琦,王文海.基于MSP430F149的智能仪表的设计[J].自动化仪表,2006,27(8):26-28.
[5]高新闻.智能仪表软件开发的自动化技术研究[D].上海:上海大学,2007.
[6]孙启富,孙运强,姚爱琴.基于STM32的通用智能仪表设计与应用[J].仪表技术与传感器,2010(10):34-36.
[7]刘迪,李云昭,马凯.智能仪表的构成要素[J].科海故事博览[J].科技论坛,2011(8):26-27.
[8]周海燕,王羡欠.工业控制中通用智能仪表系统设计[J].微计算机信息,2008,24(31):148-149.
[9]艾红,邓大伟,唐斌.基于DSP 的智能仪表串行通信与抗干扰实现[J].自动化与仪器仪表,2011(6):125-127.
[10]蒋建春,曾素华.应用于智能仪表的嵌入式OS的设计与实现[J].微计算机信息,2008,24(12):98-100.
猜你喜欢
无线互联科技(2020年12期)2020-11-25 16:29:37
制造技术与机床(2019年4期)2019-04-04 12:22:06
数码世界(2018年6期)2018-12-25 10:43:02
测控技术(2018年7期)2018-12-09 08:58:00
中国交通信息化(2018年11期)2018-03-01 05:43:42
电子制作(2017年14期)2017-12-18 07:08:00
教育教学论坛(2016年49期)2017-02-27 21:19:25
电测与仪表(2016年21期)2016-04-11 12:43:52
信息通信技术(2015年6期)2015-12-26 01:16:54
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:45