
基于Otsu方法点云粗分类的渐进三角网滤波算法研究
2014-08-25 01:19:11李成仁岳东杰
测绘工程 2014年7期
李成仁,岳东杰,于 双
(河海大学 地球科学与工程学院, 江苏 南京 210098)
基于Otsu方法点云粗分类的渐进三角网滤波算法研究
李成仁,岳东杰,于 双
(河海大学 地球科学与工程学院, 江苏 南京 210098)
针对传统渐进三角网滤波方法需要针对不同的地形条件频繁调整滤波参数,并且对低矮地物滤波效果较差等问题,结合图像分割中的Otsu方法,提出一种基于Otsu方法点云粗分类的渐进三角网滤波算法。在对原始点云数据粗分类的基础上,以点云类别属性引导滤波过程。实验结果表明,方法简单可行,可以有效地控制低矮点被误分类成地面点的可能性,提高滤波处理结果的准确性。
机载LiDAR;滤波;TIN;Otsu方法;粗分类;深度图像
机载激光雷达LiDAR(Light Detection And Ranging)是一种集激光扫描、全球定位系统GNSS(Global Navigation Satellite System)、惯性测量系统INS(Inertial Navigation System)于一体的新型传感器,主要用于快速精确获取地面及地面目标三维空间信息。相比于传统的航空摄影测量,该系统具有数据采集精度高、速度快、作业周期短、植被穿透力强、受天气影响小和可直接获取目标的三维坐标等优点,目前已在地形地貌信息获取、环境监测、资源勘察、森林调查、带状地物监测等方面获得广泛应用[1]。与日益成熟的LiDAR系统硬件技术相比,机载LiDAR数据的后处理工作还相对滞后[2],在一定程度上制约了LiDAR的发展应用。机载LiDAR点云数据处理的任务包括系统误差建模、滤波和特征地物提取等。在这些任务中,滤波及质量控制成为最大的难题,占用大约60%~80%的处理时间。因此,设计一种自动化程度高且精度高的滤波算法一直是LiDAR领域的研究热点[3]。
现有的滤波方法大致可分为两类:根据激光脚点数据的回波强度信息进行的滤波和基于高程突变原理的点云数据滤波。目前绝大多数成熟的滤波方法都是基于高程突变的原理,其中,由Axelsson[4]提出使用渐进三角网滤波算法是目前使用较为广泛的滤波方法,该算法的核心思想是通过种子点生成一个稀疏的TIN,并通过迭代处理逐层加密。但由于缺乏地形特征信息的合理引导,在实践过程中需要针对不同的地形条件频繁调整滤波参数。武汉大学左志权博士[5]提出一种基于点云类别属性引导的渐进三角网滤波算法,对内插后的栅格数据进行面向对象分割,然后采用迭代Otsu聚类、拓扑模型等手段对地面对象与非地面对象分离,最后对分类结果自适应调整滤波参数进行滤波。本文在此基础上对该滤波算法加以简化与改进:首先对LiDAR点云数据进行粗差剔除和规则格网化,生成DSM深度图像,再通过图像阈值分割技术中的Otsu算法对点云数据进行地面点与非地面点的粗分类,最后对分类后的地面点与非地面点分别以两种不同的阈值进行渐进三角网滤波。
1 Otsu算法原理
Otsu法[6]又称为最大类间方差法或大津法,是日本学者大津展之于1979年提出,因其分割效果好、适用范围广泛、简单有效而得到广泛应用。该方法是在最小二乘法原理的基础上推导出来的,其基本思路是将图像的直方图以某一灰度为阈值将图像分成两组并计算两组的方差,当被分成的两组之间的方差最大时,此灰度值就作为图像分割的阈值。
假设阈值Th将灰度级为[0,L-1]的图像分成两组,C0,C1分别代表背景区域和目标区域。C0概率为w0=w(k),C1概率为w1=1-w(k),C0均值为u0,C1均值为u1,两组的数学期望为
u=w0u0+w1u1.
(1)
背景区域与目标区域两组的类间方差为
σ(k)=w0(u0-u)2+w1(u1-u)2.
(2)

2 渐进三角网滤波原理
Axelsson提出的渐进三角网滤波算法核心思想是:假设地形局部区域是平坦的,选择局部区域内的最低点作为种子点生成一个稀疏的三角网,定位待判断点P对应的三角形,P及其在三角面上的投影点与三角形顶点间的角度分别记为α,β,γ,P到三角面的垂直距离记为d,若α,β,γ和d都小于设定的阈值(见图1),则接受P为地面点,加密TIN模型, 依次迭代直到没有新的地面点为止。通过不断地加入满足条件的点来扩大地面模型, 最终得到非常接近地表面的三角网模型[4]。该算法比较适用于密集的城区, 可以处理地形不连续的情况,此算法的一个版本已在芬兰的商业软件Terra Scan中得以实现[7]。
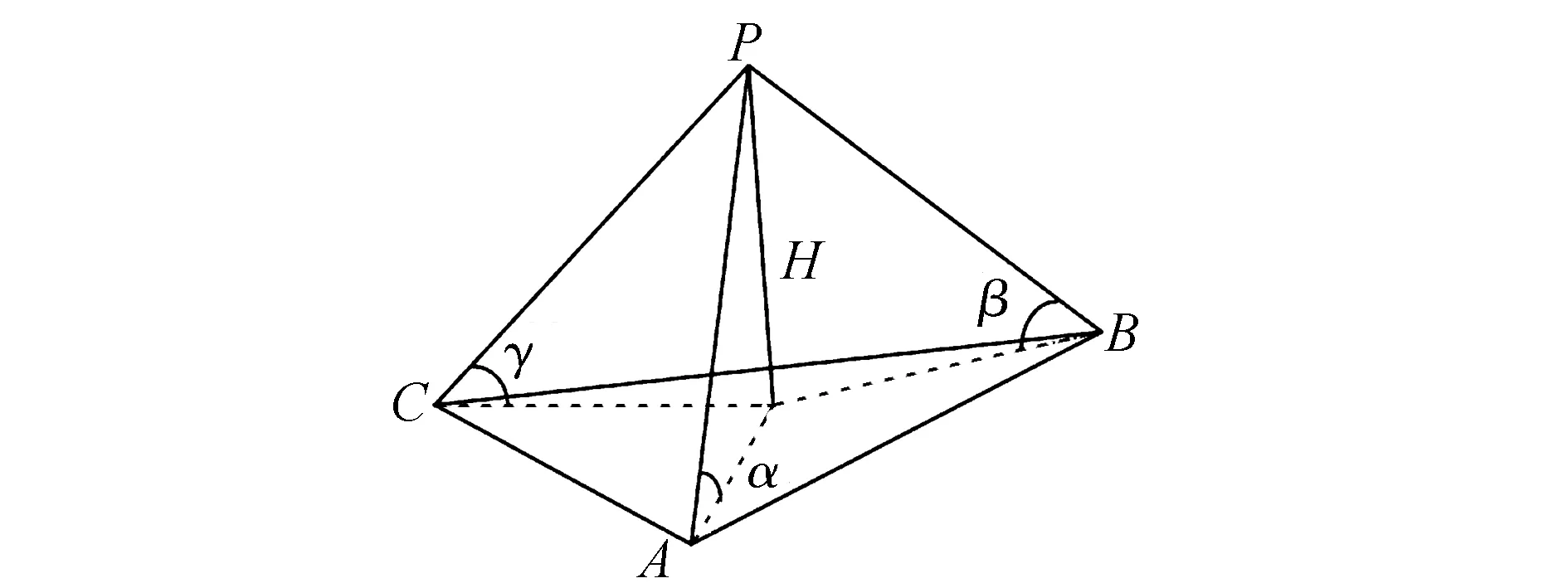
图1 渐进三角网滤波算法参数示意图
但经研究发现,该方法存在两点主要的不足:
1)在机载LiDAR扫描过程中,由于多路径反射等原因会产生比实际点位低的错误点,而该算法会选取高程最低的点作为种子点生成稀疏三角网,这样就会将这些错误点分到地面点当中,影响滤波精度。
2)如果地形变化较大,使用该方法时,单一的滤波参数不可避免地会造成地面点与非地面点的错误分类,而对于不同的地形条件频繁调整滤波参数又会给滤波过程带来繁琐的操作。
3 基于Otsu方法点云粗分类的渐进三角网滤波算法
针对前面提出的渐进三角网滤波算法的不足,在该算法的基础上结合图像阈值分割理论中的Otsu法,提出一种基于Otsu方法点云粗分类下的渐进三角网滤波。通过Otsu算法将原始点云数据分成地面点和非地面点两类,以点云类别属性调整滤波参数引导滤波过程。算法的基本思路如下:
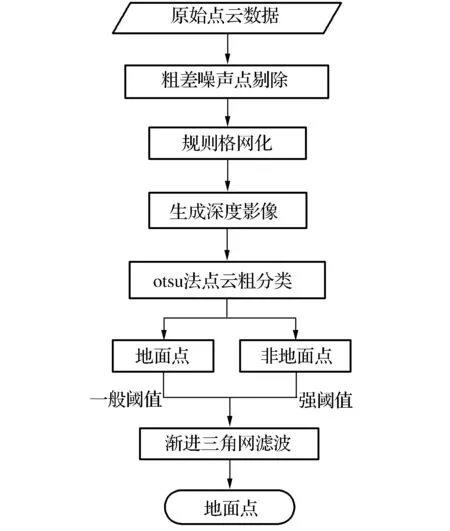
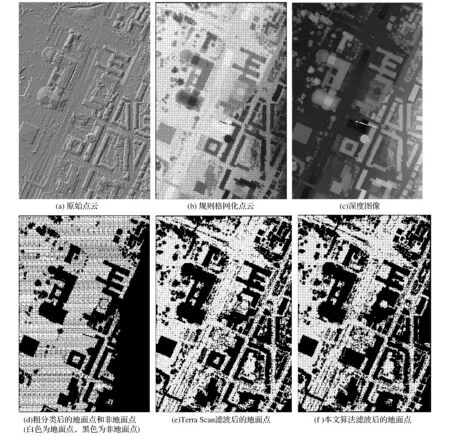
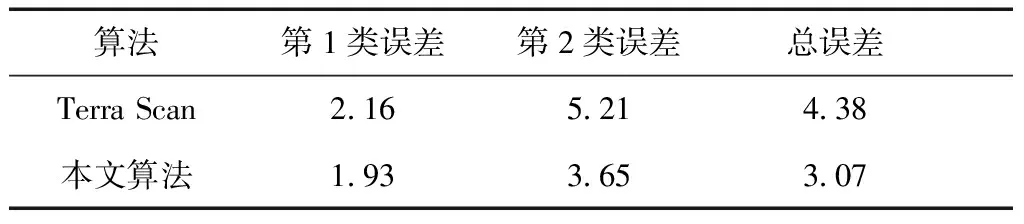
1)对原始点云数据进行预处理,剔除粗差噪声点,包括多路径反射产生的低于地面的低噪声点和由于飞鸟、电力线等反射形成的高噪声点。若某个点为低噪声点或者为高噪声点,则高程值与其领域内的其它点高差应满足一定的阈值。假设待判断点为Pa,以Pa为中心点,搜索一定领域范围内的其他点,若对邻域内的任意点P都存在|ZPa-ZP| 2)对剔除粗差噪声点之后的数据进行规则格网化重采样,采样间距应与原点云数据大致一致。然后将各点高程值按照如下公式进行灰度化[8]: (3) 这样即可生成点云的深度图像,影像的灰度值与点云的高程值成线性关系,为引入Otsu法进行点云粗分类奠定了基础。 3)计算背景和目标两组区域的类间方差极大值σ(k),选择类间方差最大时所对应的阈值k作为分类阈值,将灰度值小于该分类阈值的点标记为地面点,灰度值大于该分类阈值的点标记为非地面点。 4)分别选择粗分类后的地面点与非地面点中的最低点作为种子点构建初始三角网。对类别为地面点的数据进行优先构网,判据阈值为一般阈值;对于类别为非地面点的数据则需以强阈值作为判据阈值;最后参与构网的点云数据即为地面点数据。 滤波算法的流程如图2所示。 图2 滤波算法流程 为了检验本文提出的算法的有效性, 选择了ISPRS在线发布的CSite2参考数据作为实验数据,实验区的点云数据都经过人工或半人工的方法进行分类,每个点都被标记成地面点或非地面点。该实验区的范围为630 m×420 m,点数为243 400个,区域存在复杂房屋、大型建筑物及数据空洞,平均点距为1~1.5 m。滤波实验效果如图3所示。 图3 滤波实验效果图 图3(a)为处理前的原始点云;图3(b)为规则格网化后的点云数据;图3(c)为经过灰度转换后生成的深度图像;图3(d)显示的是粗分类后的地面点和非地面点,最佳阈值Th=86,图中白色区域为地面点,黑色区域为非地面点;图3(e)为使用Terra Scan软件滤波后的结果;图3(f)为按本文算法滤波后的结果。对照滤波前后的点云可以看出,不同大小的建筑物基本滤除干净,带状道路及地形特征得到了较好的保留,并且与Terra Scan软件滤波相比差异较小。 为了定量地分析本文滤波算法的效果,采用ISPRS2003年的滤波算法评价报告中推荐的评价体系[9]。滤波算法的质量可由第1类误差,即地面点被错误分类为地物点的误差,和第2类误差,即地物点被当作地面点的误差的形式来体现。两类误差的计算方法如下: (4) (5) (6) 式中:a为被正确分类的地面点,b为被错误分类为地物点的地面点,c为被错误分类为地面点的地物点,d为被正确分类的地物点。 对滤波后的点云数据进行统计,并对比参考数据给出的标准分类结果,定量分析结果如表1所示。 表1 滤波结果定量分析 % Terra Scan软件算法的第1类误差均明显小于第2类误差,主要是因为其内核采用的渐进三角网滤波算法很容易将部分低矮植被点、地物点错误分类为地面点, 导致第2类误差较大。本文算法对粗分类后的地面点和非地面点以不同阈值进行滤波,较为有效地控制了低矮点被错误分为地面点的可能性,第2类误差及总误差也比Terra Scan软件算法相应减小。 通过实验对比分析发现:传统的渐进三角网滤波算法对低矮植被点和近地点滤波效果较差,导致第2类误差较大;基于Otsu方法点云粗分类的渐进三角网滤波算法通过对点云数据的粗分类引导滤波过程,不需要在滤波过程中频繁调整滤波参数,方法简单可行,并且可以有效地控制低矮点被误分类成地面点的可能性,从而减小第2类误差及总误差。但本文算法仍存在不足之处,如何根据不同地形自适应地改变滤波阈值来提高算法自适应能力,和如何降低规则格网化后的点云精度损失都是下一步的研究内容。 [1]张小红. 机载激光雷达测量技术理论与方法[M]. 武汉: 武汉大学出版社, 2007. [2]AXELSSON. Processing of laser scanner data-algorithms and applications [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 1999,54: 138-147. [3]黄先锋,李卉,王潇,等.机载LiDAR数据滤波方法评述[J].测绘学报,2009,38(5):466-469. [4]AXELSSON. DEM generation from laser scanner data using adaptive TIN models [J]. International Archives of Photogrammetry and Remote Sensing, 2000, 33(B4): 110-117. [5]左志权. 顾及点云类别属性与地形结构特征的机载LIDAR数据滤波方法[D].武汉:武汉大学,2011. [6]李梅. 基于Otsu算法的图像分割研究[D]. 合肥:合肥工业大学,2011. [7]隋立春,张熠斌,张硕,等.基于渐进三角网的机载LiDAR点云数据滤波[J].武汉大学学报:信息科学版,2011,36(10):1159-1163. [8]王大莹,程新文,潘慧波,等. 基于最佳阈值形态学方法对机载LiDAR数据进行边缘提取[J].测绘工程,2009,18(2):34-37. [9]李峰,崔希民,袁德宝,等.改进坡度的LiDAR点云形态学滤波算法[J].大地测量与地球动力学,2012(32):128-132. [责任编辑:刘文霞] Study on adaptive TIN filtering point clouds coarse classification based on otsu algorithm LI Cheng-ren,YUE Dong-jie,YU Shuang (School of Earth Sciences and Engineering, Hohai University, Nanjing 210098,China) The traditional method of adaptive TIN filtering for different terrain conditions requires frequent adjustment of filtering parameters and the filtering effect on low surface features is poor. Combined with the image segmentation Otsu algorithm, an adaptive TIN filtering of point clouds coarse classification based on Otsu algorithm is proposed. This algorithm is based on coarse classification of the original point clouds. Point clouds filtering process is guided by class attribute. The results show this algorithm is simple, which can effectively control the possibility of low points misclassified into the ground points and improve the accuracy of filtering process. airborne LiDAR; filter; TIN;Otsu algorithm; coarse classification; depth-image 2013-08-19 李成仁(1989-),男,硕士研究生. P237 :A :1006-7949(2014)07-0034-04
4 实验结果及分析
5 结 论
猜你喜欢
制造技术与机床(2019年9期)2019-09-10 07:36:54
西南交通大学学报(2018年6期)2018-12-18 02:22:28
河北遥感(2017年2期)2017-08-07 14:49:00
智能计算机与应用(2017年2期)2017-05-04 00:45:34
衡阳师范学院学报(2016年3期)2016-07-10 07:16:27
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
长江工程职业技术学院学报(2014年4期)2014-11-30 02:41:40
电子设计工程(2014年20期)2014-02-27 12:01:00
测绘科学与工程(2013年4期)2013-03-11 15:07:41
