
小功率开关磁阻电机驱动系统设计
2014-08-24 09:39:49刘志忠赵远征孙会琴
河北工业科技 2014年2期
刘志忠,李 斌,赵远征,孙会琴
(河北科技大学电气工程学院,河北石家庄 050018)
小功率开关磁阻电机驱动系统设计
刘志忠,李 斌,赵远征,孙会琴
(河北科技大学电气工程学院,河北石家庄 050018)
介绍了开关磁阻电机的原理以及本次实验所用到的三相12/8极48 V小功率开关磁阻电机,并以ARM单片机STM32F051为控制核心构成了调速系统,按功率变换器设计要求将MOS管并联使用,并根据选用的MOS管介绍它的驱动电路HIP4086,同时简要介绍了开关磁阻电机调速系统的各部分检测电路、保护电路,最后通过观察堵转和额定时SRM相电流和相电压波形以及对波形进行观察、分析,验证了控制器良好的调速性能。
开关磁阻电机; 调速系统; STM32F051
开关磁阻电机是20世纪70年代开始研制、80年代中期发展起来的一种新型交流调速系统,它将新的电机结构——开关型磁阻电机与电子技术以及控制技术融为一体,兼有异步电机变频调速系统和直流电机调速系统的特点,是一种结构简单坚固、运行可靠性高的调速电机。开关磁阻电机驱动系统(SRD)维修简便,具有灵活的可控性,易于实现四象限运行,系统动态响应快,在宽广的转速和功率范围内都具有高输出和高效率[1]。对此,本文介绍了一种针对48 V电压、36 W的SRM的控制系统。
1 开关磁阻电机
SRM电机定子和转子由硅钢叠片组成,采用“双凸极”结构,定子和转子极数不相等。SRM的运转遵循磁阻最小原理,即磁通总是沿着磁阻最小的路径闭合。当定子某相绕组通电时,所产生的磁场因为磁力线扭曲而产生切向的磁拉力,试图让相近的转子极旋转到其中心轴线与该定子极中心轴线重合位置,也就是磁阻最小位置[2]。本设计中采用三相12/8极36 W开关磁阻电机。SRM运行原理同样遵循电磁感应定律、全电流定律、能量守恒定律以及牛顿定律。根据以上定律,可以得出以下方程并设计如图1所示的样机。
1)单相的电压平衡方程:
(1)
2)忽略磁饱和得转矩方程:

(2)
由式(2)知:
2)相绕组电流越大输出转矩越大,运动电势越大;
3)转矩方向与绕组电流方向无关,只要在电感曲线的上升段通入绕组电流就会产生正向电磁转矩,在电感曲线的下降段通入绕组电流会产生反向电磁转矩[3]。

图1 设计样机Fig.1 Design of the prototype
2 SRD调速系统
图2所示为SRD调速系统,包括开关磁阻电机本体、功率变换器、传感器、控制器等部分[4]。
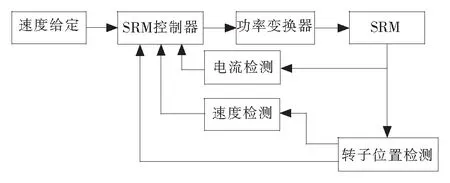
图2 SRD调速系统框图Fig.2 SRD speed control system block diagram
2.1功率变换电路及其驱动电路
对于市场上的小型电动车,考虑到成本和安全性,一般选取较低的供电电压(一般为60 V和48 V),而对于电池供电的调速系统,提高效率是至关重要的。其次,降低功率变换器的成本,提高系统可靠性,对于增强SRD的市场竞争力也是十分重要的。在本次设计中,由于系统工作在低压大电流状态下,必须选择大容量型号的MOSFET。可是大容量的MOSFET价格往往十分昂贵,这就增加了成本。因此,各相选用2个小容量且价格低廉的MOS管并联运行,来代替一个大容量价格较高的MOSFET管运行,并且当某一个功率管出现问题时,不影响其他功率管的工作,增强了系统的可靠性。图3所示为A相桥臂功率转换电路。利用2个小容量MOS管并联来替代单只大容量功率管的方法,实现对电机三相绕组供电的目的[5]。
本文以A相为例,功率桥桥臂上有上下两组MOS管,每组分别并联了6个MOS管,每相桥臂分设上、下两组开关管。MOS管在长时间大电流工作环境下,其发热量较大,容易对电路造成影响。在设计中,MOS管安装在导热铝排的两侧,可以对MOS管进行散热。其他两相桥臂硬件电路设计同A相相同,A,B,C三相逐次导通。
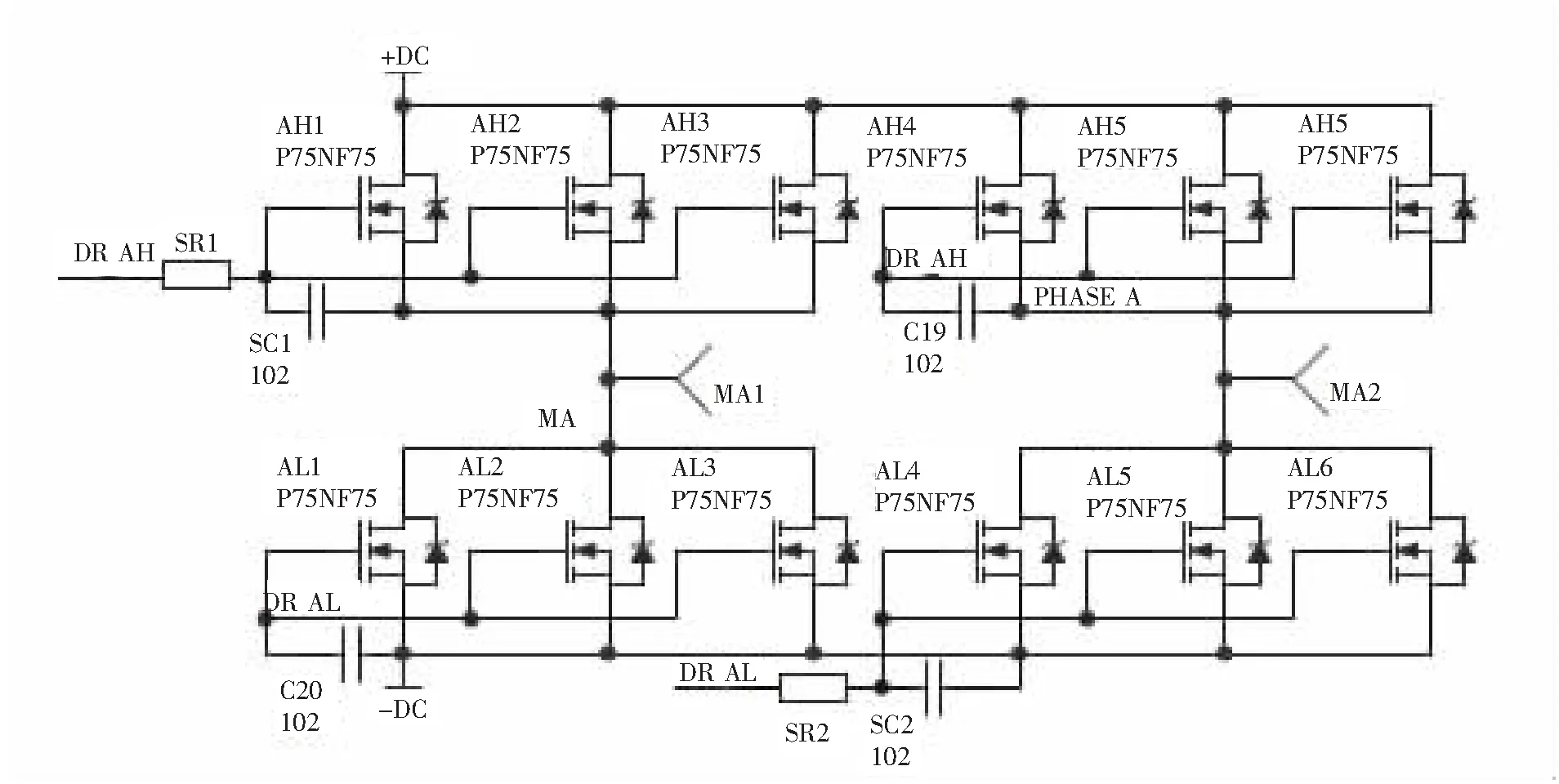
图3 A相桥臂功率转换电路Fig.3 A power conversion circuit phase bridge arm
MOSFET管采用型号为P75NF75,其耐压值为75 V。P75NF75管门极电压为15 V,而单片机STM051输出的高电平为3.3 V,无法直接驱动MOS管,必须通过驱动电路将单片机的导通电压信号抬高到15 V,MOS管才能导通。本次设计选用HIP4086驱动电路,HIP4086是三相桥式N通道MOS管驱动集成电路,特别针对于脉宽调制电动机控制,如图4所示。
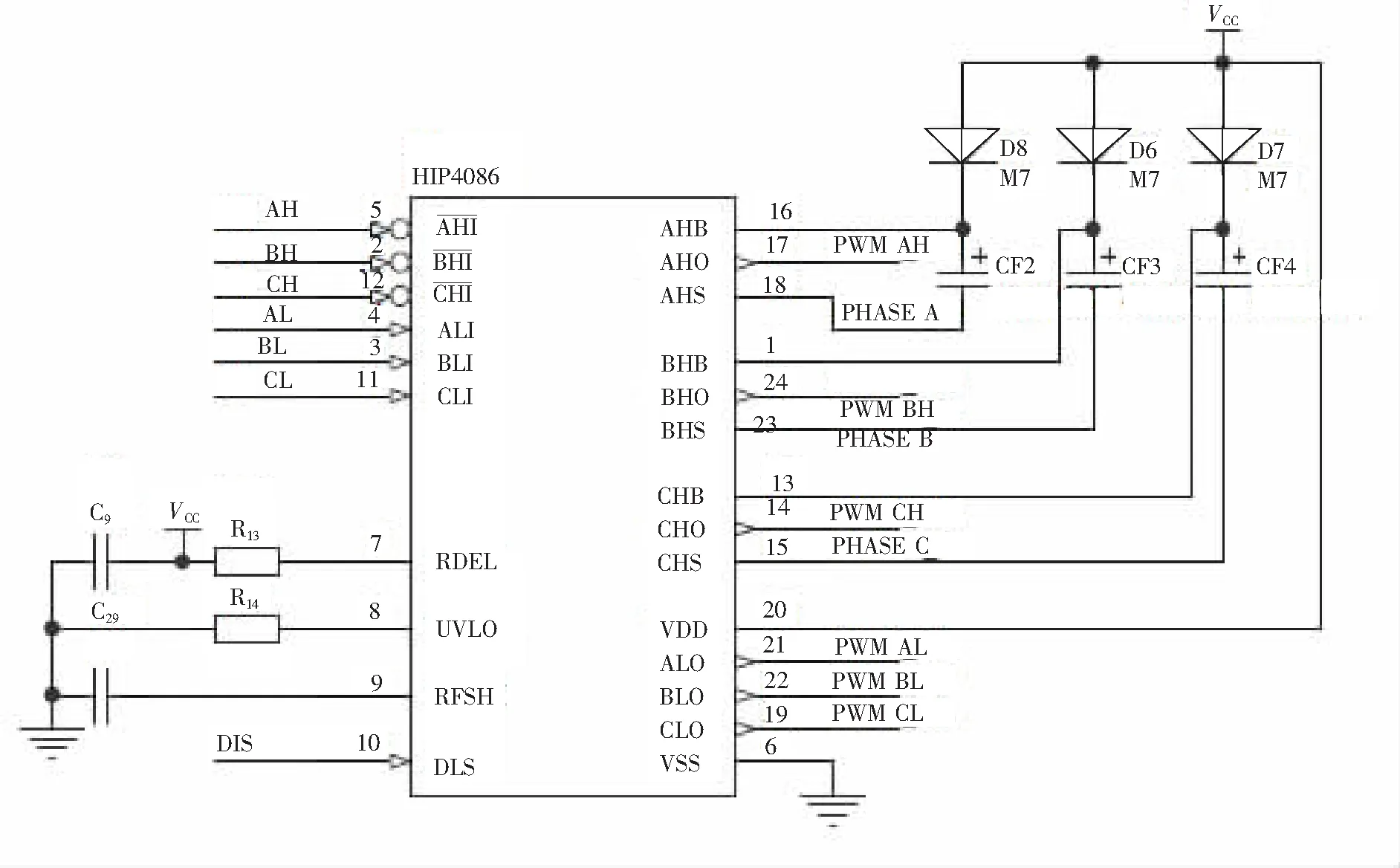
图4 HIP4086驱动电路Fig.4 HIP4086 drive circuit
xHB(A,B,C)16,1,13每个引脚需要1个外部自举二极管和1个电容,自举二极管的负极和自举电容的正极与每个xHB引脚相连。xHO(A,B,C)和xLO(A,B,C)分别为高边和低边输出,与MOS管的栅极相连。xHI(A,B,C)为高端逻辑电平输入。这3个脚上的逻辑电平分别控制高端输出驱动器xHO(A,B,C),当xHI为低电平时,xHO为高电平。当xHI为高电平时,xHO为低电平。xHI能被0 V到15 V的信号电平驱动。xLI(A,B,C)为低端逻辑电平输入,分别控制3个低端的输出驱动器xLO (A,B,C),如果高端输入接地,则低端输入控制xLO和xHO驱动器。脚7 RDEL为死区时间设定,该脚上的电阻与Vcc相连来设置决定驱动器间死区时间的定时电路,因为所有的驱动器关闭都没有可调延迟,因此RDEL的电阻保证驱动电路的延迟导通不会被击穿。例如:当A相的中心轴线与该定子极中心轴线位置重合,也就是磁阻最小位置时,给B相通电,BLO输出为低,BHO为高,二极管导通,自举电容CF2充电,BH上面的左边3个MOS管导通,3个MOS管栅极电压近似为15 V,+DC加在绕组上面,导通,然后以B-C-A-B的顺序导通上电。图5所示为15 V的电压信号用来驱动MOS管。
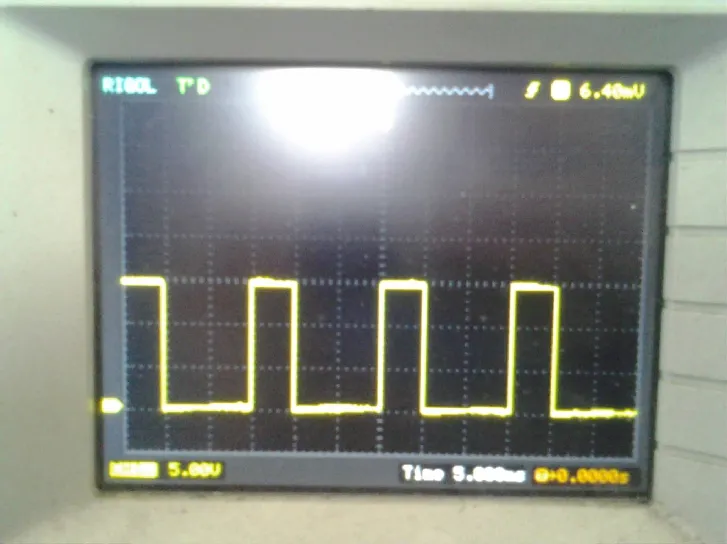
图5 驱动电路输出的信号Fig.5 Driving circuit of output signals
B相导通上电时,B相上桥臂左边3个MOS管导通,B相下桥臂右边3个MOS管导通,其他MOS管做限流作用,以后会改进为二极管。
2.2位置传感器
位置传感器用于检测电机转子相对位置,以反馈至逻辑控制电路,位置检测的目的是要用位置传感器测定来确定对相绕组的开通或关断。同时还可以根据位置检测器反馈回来的信息进行速度计算,实现速度控制和电机转速信息[6]。
传感器安装在定子上,遮光盘固定在转子上,当电机旋转时带动遮光盘一起旋转,遮光盘进入监测点后传感器被遮住,光敏元件截止,输出信号发生变化,并且增加了如图6所示的2个SN74HC14D反相触发器对信号进行处理,进入单片机的信号为标准的方波。图7是不同角度位置对应的光电脉冲信号。S1,S2,S3分别表示光电管1,2,3的输出波形[7]。
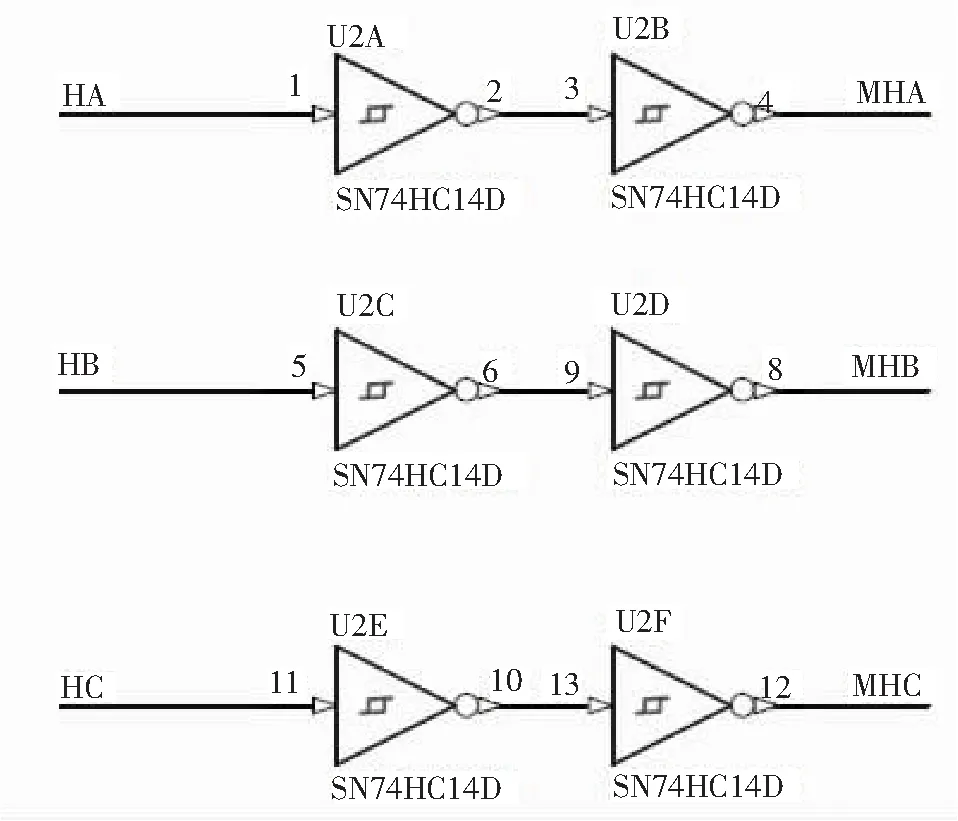
图6 SN74HC14DFig.6 SN74HC14D
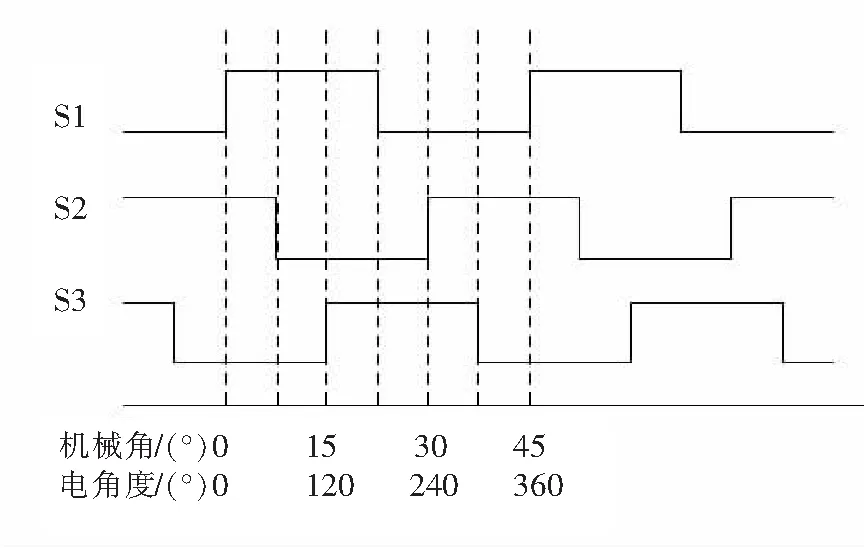
图7 光电编码信号Fig.7 Photoelectric coded signal
2.3电流检测
如图8所示,在每一相功率变换器的MOS管源极和地之间连接康铜丝,其电阻小,当流过电流时,两端电压信号输入到-DC经过LM358D运算放大器之后进入转换器A/D,发送到单片机。
2.4欠压保护
为了保护电池,本次设计的欠压保护如图9所示,从降低成本出发,采用分压电路进行电源电压采集Ud,大概数值是2 V,利用单片机内部A/D转换功能进行模数转换并与程序设定值进行比较,当实测电压值低于设定值时停止工作,改变RV1值时可以对欠压值进行调整。
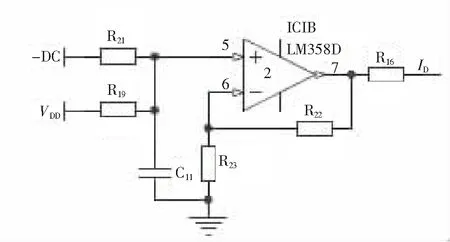
图8 电流检测电路Fig.8 Low-sensing circuit
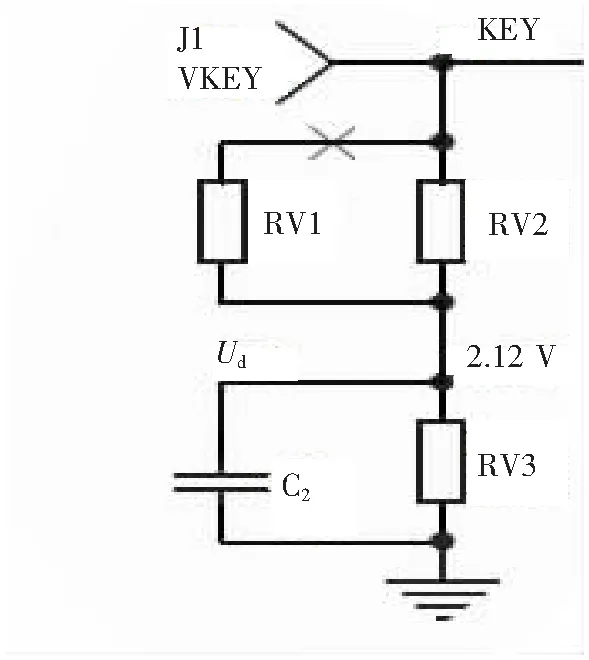
图9 欠压保护电路Fig.9 Low-voltage protection circuit
2.5过流保护
过流保护电路如图10所示。
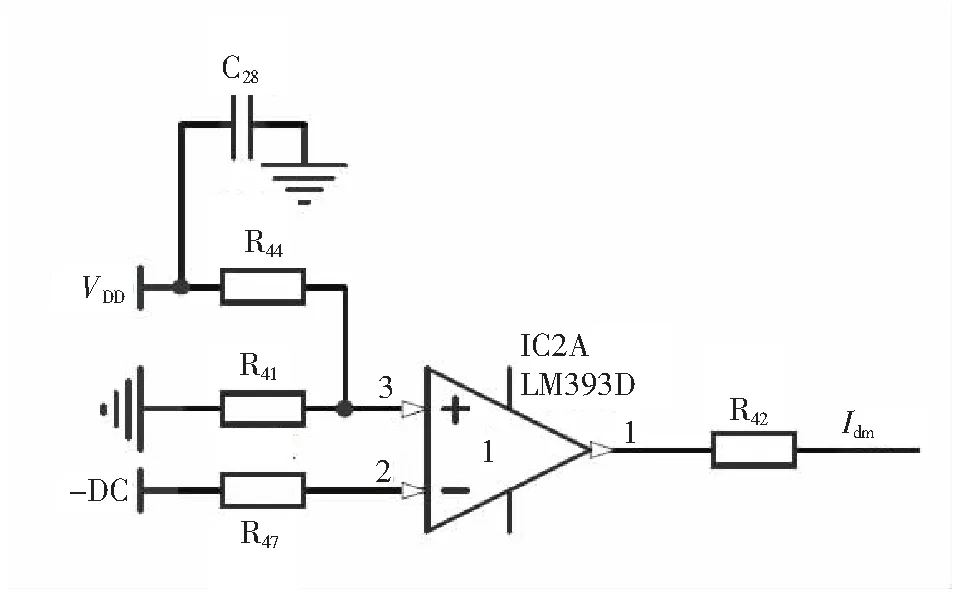
图10 过流保护电路图Fig.10 Over-current protection circuit diagram
3 控制器芯片的选择
控制器的芯片采用STM32F051单片机,STM32F051系列采用高性能的ARM32位RISC 内核,工作于48 MHz频率,高速的嵌入式闪存,并广泛集成增强型外设和I/O 口。在设计中,STM32F051单片机对电机转子的位置信息、电机的实时转速和绕组电流不断检测,通过PWM斩波控制功率变换器,实现电机转速调节并兼有过压、欠压、堵转、过温等保护功能。当控制器的直流母线过流或供电电池欠压时,相应的检测电路产生中断信号,在单片机接到中断信号后,其立即进入中断处理程序,对电机的控制器的电子元件和供电电池进行保护。针对当两组MOS管同时开通或关断时,有可能在两组MOS管上同时出现尖峰电压,击穿MOS管的问题,在程序编写中对PWM输出进行了调理,通过对单片机定时器设定死区时间,将上、下桥臂两组MOS管的导通、关断时间错开、延长,实现了对MOS管的保护。
4 软件设计
本次设计所用STM32F051,采用C语言进行编程。主要包括:电机初始化程序、主程序、位置检测判断程序、各种中断子程序等。在SR电机低速和起动时,采用定角度电流斩波(CCC)结合电压PWM控制的方式;在SR电机高速时,采用变角度(APC)电压PWM控制方式,通过软件改变开关管的开通角和关断角进行调节[9]。速度反馈可以通过转子位置信号计算得到,与期望的速度比较后得到的差值作为速度PI调节器的输入,而速度调节器的输出信号则与电流的反馈信号做比较,形成电流偏差经过电流调节环的调节后用以控制PWM的占空比[10]。主程序流程图如图11所示。
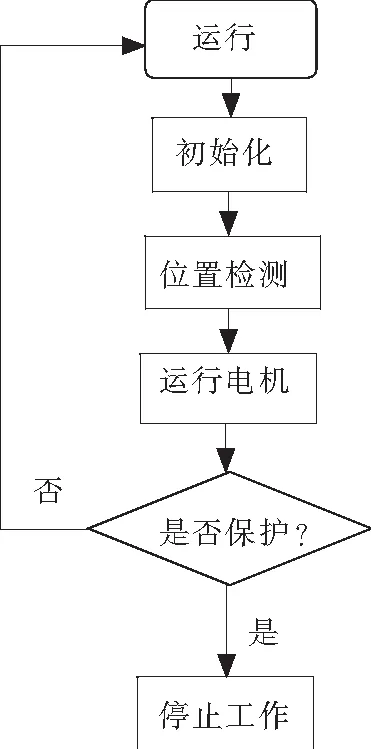
图11 主程序流程图Fig.11 Master flowchart
5 实验分析
本次实验样机采用3相12/8极,功率为36 W,电压为48 V,额定转速3 500 r/min的开关磁阻电机。通过以上分析搭建了硬件实物电路,并进行了实验,如图12所示。

图12 实验用控制器Fig.12 Experiment with the controller
由于不堵转时电流波动没有太大的变化,所以在低速时堵转测量一下电流值,用示波器测量电机在堵转转速为100 r/min时的相电压,相电流波形如图13所示。
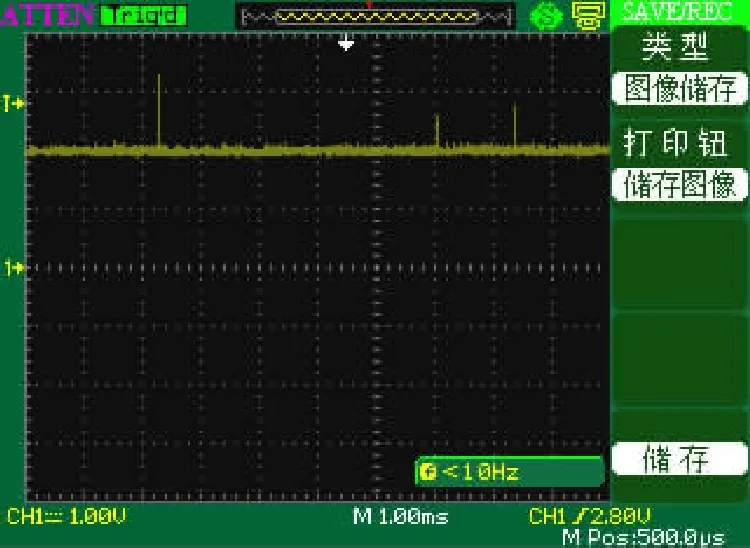
图13 n=100 r/min,A相堵转电压波形图Fig.13 n=100 r/min, A phase locked-rotor voltage waveform in figure
相电压在示波器上大概为2 V,加在绕组上的电压大概为Ud=24×2 V=48 V,用示波器测量值也为48 V,符合要求,电流值为Id=1.54 V+I×50 mΩ,由于堵住,在换相时电流值有波动,如图14所示。
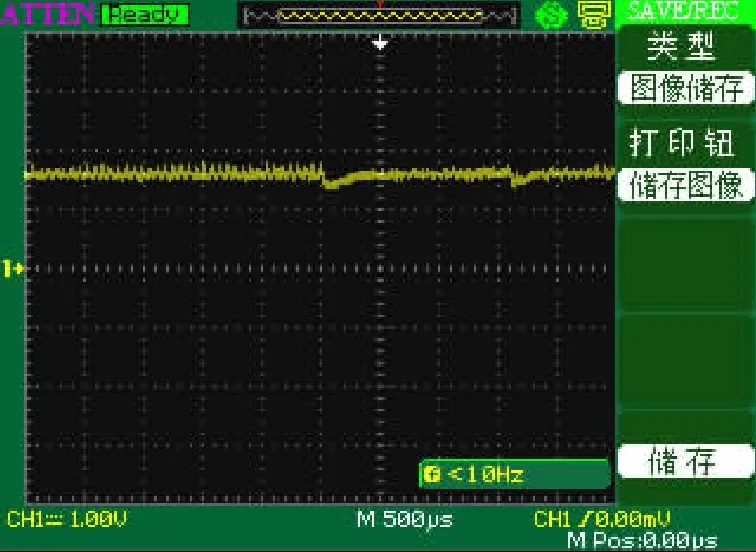
图14 n=100 r/min,A相堵转电流波形图Fig.14 n=100 r/min,A phase locked-rotor current waveform in figure
电机在额定转速3 500 r/min时,电机相电流和电压波形如图15、图16所示。
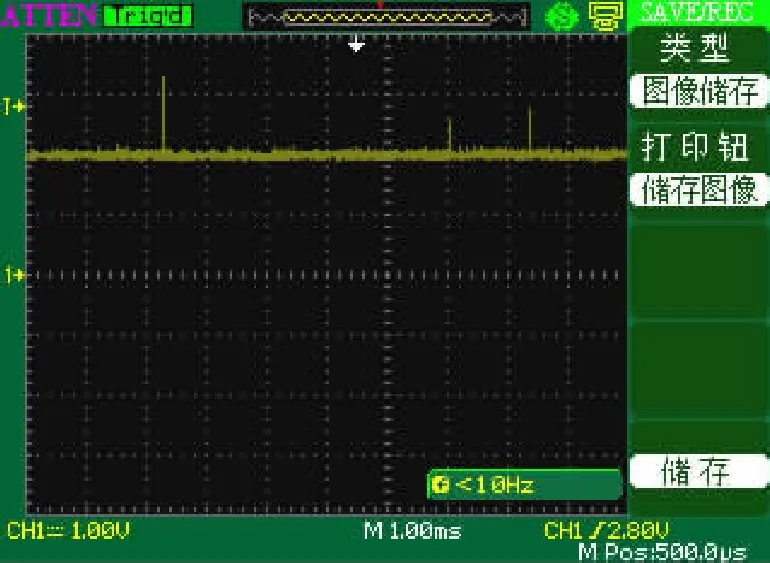
图15 n=3 500 r/min,A相空载电流波形图Fig.15 n=3 500 r/min,A no-load current waveform graph
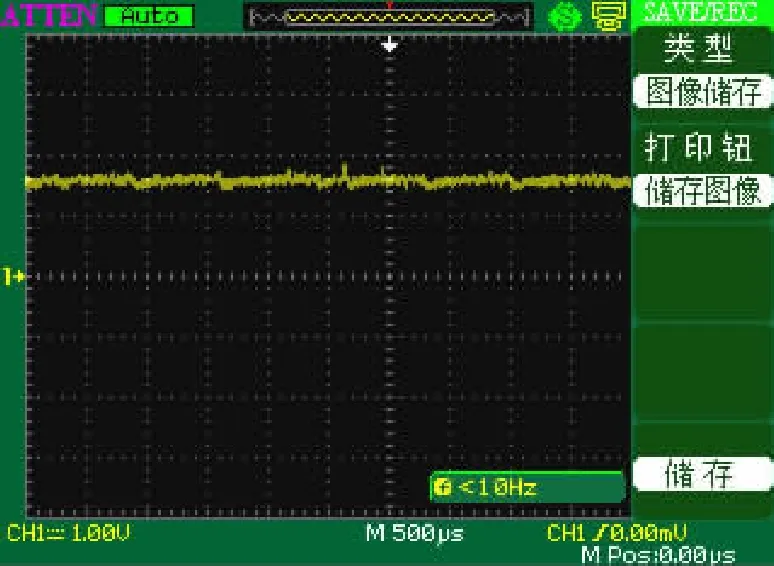
图16 n=3 500 r/min, A相空载电压波形图Fig.16 n=3 500 r/min, A no-load voltage waveform in figure
电机相电压也为2 V,所以加在绕组的电压为48 V,电流值的计算同上。
6 结 语
笔者设计的36 W小功率三相SR电机控制系统,其驱动电路采用市场上所售的HIP4086驱动模块,功率变换电路采用并联模式,增加了功率变换器的容量,对MOS管采用一定的过流、过压保护措施,控制核心芯片采用ARM系列的STM32F051,SRD可以高效率运行,总之,通过实验基本验证了控制系统在SR高、低速的运行情况,达到了设计的要求。
/
[1] 叶华峰,王双红,詹琼华,等. 2.2 kW开关磁阻电机驱动系统的设计[J].中小型电机,2005,32(3):45-48. YE Huafeng,WANG Shuanghong,ZHAN Qionghua,et al. Design of 2.2 kW switched reluctance motor drive study[J].Small And Medium-sized Electric Machines,2005,32(3):45-48.
[2] 吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社, 2000. WU Jianhua.Design and Application of Switched Reluctance Motor [M].Beijing:China Machine Press,2000.
[3] 董 亮.4 kW开关磁阻电机控制与驱动系统设计[D].北京:北京交通大学,2008. DONG Liang.The Design of 4 kW Switched Reluctance Motor Control and Drive System[D]. Beijing:Beijing Jiaotong University,2008.
[4] 袁 驰,范 岩.基于DSP的开关磁阻电机控制系统设计[J].电力电子技术,2009,43(2):27-29. YUAN Chi,FAN Yan.Base on DSP switched reluctance motor control system design[J]. Power Electronic Technology,2009,43(2):27-29.
[5] 杨岳峰, 张奕黄. SRM常用的几种功率变换其主电路及原理[J].电机电器技术,2003(2):19-20. YANG Yuefeng,ZHANG Yihuang. SRM commonly used several power transform its main circuit and principle[J].Machine Electric Technology,2003(2):19-20.
[6] 王宏华.开关型磁阻电动机调速控制技术[M].北京:机械工业出版社, 1997. WANG Honghua. Switch Type Reluctance Motor Speed Regulation Control Technology[M].Beijing:Mechanical Industry Press, 1997.
[7] 吴红星.开关磁阻电机系统理论与控制技术[M].北京:中国电力出版社,2010. WU Hongxing. Switch Reluctance Motor System Theory and Control Technology[M]. Beijing:China Power Press, 2010.
[8] 熊俊峰,郑寿森,祁新梅,等.电动汽车开关磁阻电机驱动电源的设计与研究[J].电力电子技术,2009,43(7):42-44. XIONG Junfeng,ZHENG Shousen,Qi Xinmei,et al.Electric vehicle design and research of switched reluctance motor drive power supply[J].Power Electronics Technology,2009,43(7):42-44.
[9] 曹礼松.开关磁阻电机调速控制技术研究[J]. 集成电路通讯,2006,9(3):7-12. CAO Lisong. Switched reluctance motor speed control technology research[J]. Integrated Circuit Communication,2006,9(3):7-12.
[10] CHEN Hao,PAVLITOV C.Large power analysis of switched reluctance machine system for coal mine[J].Mining Science and Technology,2009(19):657-659.
Design of the drive system of low-power SRM
LIU Zhizhong, LI Bin, ZHAO Yuanzheng, SUN Huiqin
(School of Electrical Engineering, Hebei University of Science and Technology, Shijiazhuang Hebei 050018, China)
The paper introduces principle of SRM and the SRM of three-phase 12/8 poles and 48 V. The speed regulation system based on ARM microcontroller STM32F051 is provided, in which the MOS tubes are in parallel according to design requirements of power converter. HIP4086 is used as the drive circuit. The detection circuit and the protection circuit of the speed regulation system are presented. The waveforms of phase current and phase voltage of locked or rated SRM are analyzed, which proves the good speed regulating performance of the controller.
switched reluctance motor (SRM); speed regulating system; STM32F051
1008-1534(2014)02-0137-06
2013-06-06;
2013-10-09
刘志忠(1989-),男,河北秦皇岛人,硕士研究生,主要从事电机与电器方面的研究。
E-mail:755246153@qq.com
TM352
A
10.7535/hbgykj.2014yx0202
责任编辑:李 穆
刘志忠,李 斌,赵远征,等.小功率开关磁阻电机驱动系统设计[J].河北工业科技,2014,31(2):137-142.
LIU Zhizhong, LI Bin, ZHAO Yuanzheng, et al.Design of the drive systemof low-power SRM[J].Hebei Journal of Industrial Science and Technology,2014,31(2):137-142.
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:46
电子制作(2019年13期)2020-01-14 03:15:28
电子制作(2019年15期)2019-08-27 01:12:10
电子制作(2019年9期)2019-05-30 09:42:02
电子制作(2017年1期)2017-05-17 03:54:12
电子设计工程(2017年20期)2017-02-10 03:40:05
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年2期)2016-04-12 00:24:42
云南电力技术(2015年2期)2015-08-23 01:31:52
电机与控制应用(2015年1期)2015-03-01 03:49:08
