
基于单片机的锅炉自动控制系统设计
2014-08-23 09:28
应用能源技术 2014年2期
(宝钢集团八钢公司,乌鲁木齐 830000)
0 引言
热水锅炉是目前广泛应用于居民住宅采暖的供热设备之一。其工作原理是,热水锅炉将水进行加热,当水温达到要求时,启动循环水泵将供热管道的水进行加压循环,从而使住宅内的散热器升温达到采暖的目的[1-4]。
在供热期间,由于供热管道有一定的水量损失,为保证供热质量,必须通过补水泵对锅炉进行补水。补水的原则是:在设备和管道承压能力下保证系统水不汽化[5-7]。
传统的热水锅炉供热系统中,循环泵的启动和停止有由人工操作,而补水泵是由安装在回水管上的电接点压力表控制的。通过电接点压力表设定的回水管补水压力的上下限值,来控制补水泵的停止和工作。其中压力上限值应不大于管道和锅炉所承受的最大压力,压力下限值应保证系统水不汽化。这种补水控制有如下缺点:补水泵频繁启动和停止;补水压力不恒定;工人劳动强度大,工作环境差。就各工业部门的现状来看,除研制新型节能锅炉以外,对现在旧设备进行技术改造,提高锅炉的自动化程度也是一项极其重要的途径[8-9]。
在设计锅炉自动调节系统方案时,考虑到现在市场上已经大量供应新器件,而且这些新器件具有功能更强大、运行更稳定、应用更简单额、升级更方便等优点,所以本系统采用新型80C592单片机和新型数字式传感器。系统对锅炉水位、蒸汽压力、经济燃烧等系统的热工过程实现自动调节功能。系统通过面板操作,实现开工运行、参数显示、不停机进行参数修改和功能设置等。使锅炉的安全性、操作性大大提高。
1 系统概述
系统包括信号采集系统、核心控制单元,供水系统,指示系统、操作单元和报警系统。其完成的主要系统功能包括:系统具有高低水位报警,由软件实现大小泵的控制来实现水位的自动调节;系统具有高低压报警,由软件控制外围电磁阀和风机来实现压力的调节;系统具有高低温报警,由软件控制外围电磁阀和风机来实现工作温度的需求;系统具有无扰动手动切换控制以及紧急情况报警急停功能。该系统的工作原理,本系统是由信号采集装置,微控制单元,外围机电设备等组成。利用传感器,采集锅炉的高低压,高低水位,高低极限水位以及温度信号,将这些信号传送到核心控制元件单片机进行判断,以控制外围相应设备。当系统所收集到的参数超过系统设定的安全参数时,系统可以自动急停控制,使锅炉停止工作。使锅炉安全稳定的工作,为了保证系统的稳定性,系统还采取了手动功能。正常工作时自动状态和手动状态操作可以随时无扰动切换。
2 系统设计
2.1 系统分析
汽包水位是锅炉运行的主要指标,是一个非常重要的被控变量,维持水位在一定范围内是保证锅炉安全运行的首要条件,这是因为:水位过高会影响汽包内汽水分离,饱和水蒸汽带水过多,同时过热蒸汽温度急剧下降。该过热蒸汽作为汽轮机动力的话,将会损坏汽轮机叶片,影响运行的安全性与经济性;水位过低,说明汽包内的水量较少,而当负荷很大时,水的汽化速度加快,则汽包内的水位变化速度亦随之加快,如不及时调节,就会使汽包内的水全部汽化,导致炉管烧坏,甚至引起爆炸。因此,在锅炉控制系统中必须对汽包水位有深入了解并在运行中严加控制。
在对水位信号的采集中,使用传统的电极式传感仪。考虑到可能受到“虚假液位”的影响,在软件的编制中,在识别到高极限信号后,同时检测是否同时处于高温高压状态,如果是,说明锅炉处于危险状态,必须急停,如果是高温或高压状态,加上一个延时程序,然后对信号进行重复采集并比较。如果前后比较一致,执行报警等程序,反之,则保持原样运行。
2.2 温度压力传感器
在对温度压力等信号采集时,系统可采用最新的数字式传感器。该类型传感器功能强大,具有直接对采集信号进行数字化处理、显示和报警设定功能,也可和单片机进行数据传输。在本系统中,当采集的信号超出设定参数时,传感器即时向单片机发出电信号,软件可对这些信号进行识别并作出相应控制。
2.3 CPU选择
CPU是微机的核心,是决定整机性的关键,因此在硬件设计中选取CPU的型号是很重要的。目前国内市场上单片机的型号很多,市场上的供应商有美国的Intel, Motorola,在Zilig公司,荷兰的Philips,日本的NEC,德国的Siemens等公司的单片机。其中Intel公司的MCS-51系列由于其参考资料比较齐全,开发工具比较完善,在全国工业控制系统中得到广泛的应用。因此,在本系统选用MCS-51系列的80C592芯片。
2.4 硬件电路设计
如图1所示。
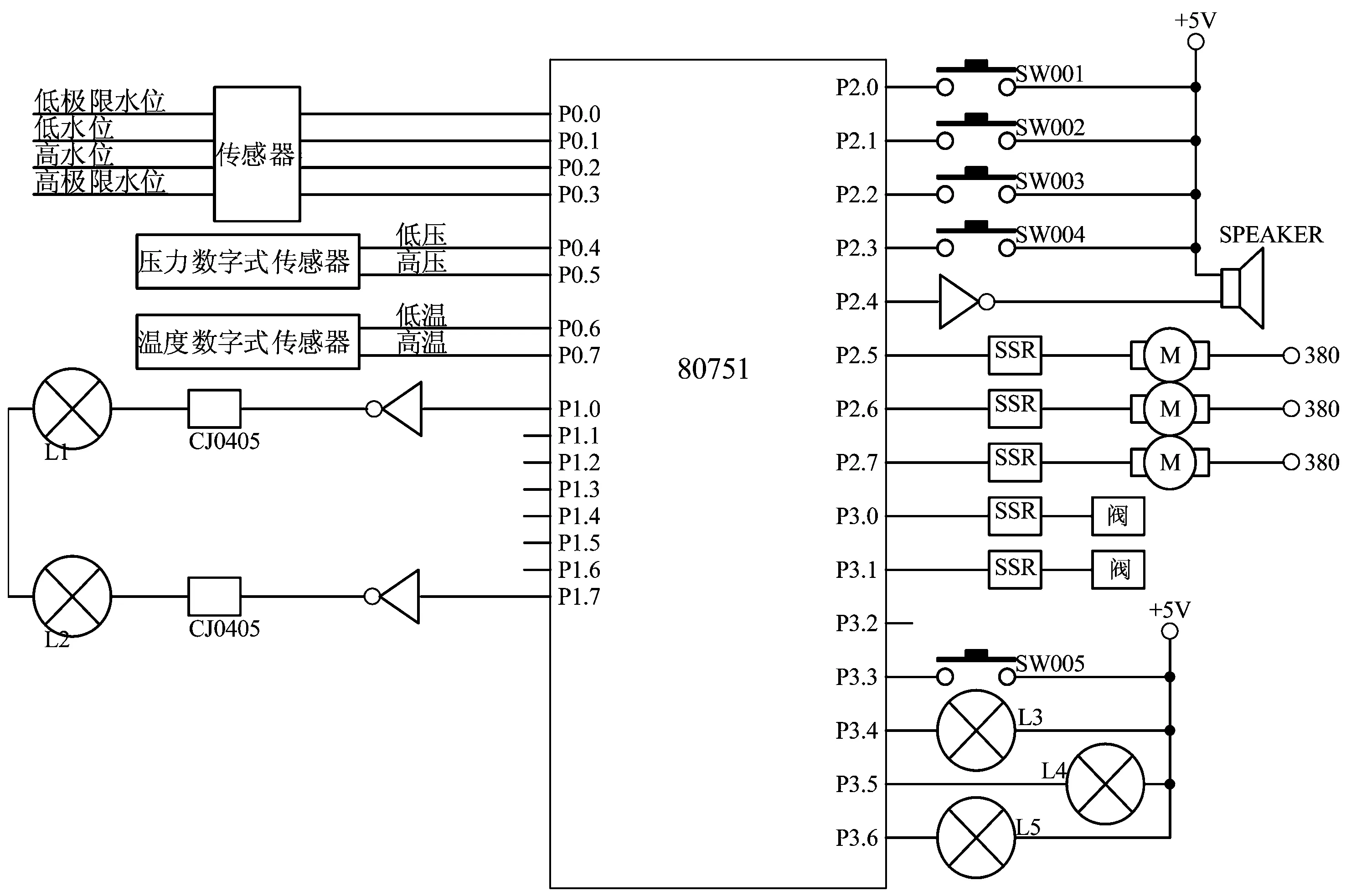
图1 硬件电路示意图
2.5 抗干扰隔离设计
单片机控制系统和强电控制回路共地是引起干扰的主要原因,因为强电控制回路中的电流和电压往往很大,并会在强电用电器和地之间形成强大的脉动干扰。这个脉动干扰必然会通过接地不良电阻和电容耦合到单片机主机回路中。消除这些脉动干扰的最有效方法是使单片机弱电部分和强电控制回路隔开,在电气连接上切断它们彼此间的耦合通路。在单片机控制系统中,电气隔离通常可分为单片机对开关量的输入/输出隔离和单片机对模拟量的隔离。
2.6 指示系统设计
在系统对设备工作状态的指示中,为了达到引起操作人员的注意,采用白炽灯泡指示,由于单片机的输出驱动能力小,所以必须增加驱动器来实现。CJ0451是双外围正与驱动器.图2所示为采用CJ0451驱动预热灯泡的实际接线图。

图2 CJ0451驱动预热灯泡的实际接线图
2.7 安全系统设计
当锅炉水位过高或气压过高时,为了保证锅炉的运行安全,设计了两个电磁阀,电磁阀1位于锅炉高极限水位上部,电磁阀2位于锅炉低极限水位下方。当锅炉内处于高温高压状态时,打开电磁阀1,释放一定蒸汽。回到安全压力时,系统控制电磁阀关闭。当锅炉内水位超过高水位极限时,打开电磁阀2,排出一定体积的水,当水位到高水位时,电磁阀2关闭。在正常工作时,两个电磁阀的自设状态均为闭合状态。
2.8 报警系统
为了使现场人员能够及时地监视锅炉的生产情况,整个系统设计有四个报警系统,即水位上、下限,以及蒸汽压力上限报警。这里采用软硬件相结合的方式进行报警。
系统采用软件报警程序,即将被测参数与规定的上、下限值进行比较,根据比较结果进行报警或处理,整个过程都有软件实现。要求当系统各参数全部正常时,绿灯亮。若某一个参数不正常,将发出声光报警信号。由于各位都接有反向驱动器,所以,当某位为“1”时,该为指示灯亮。本程序的设计思想是设两种报警模式,一种报警是蜂鸣一定时间后自动停止,用于工作状态时出现的不正常状态报警,此时锅炉处于自动调节范围,经过自动调节可恢复正常工作状态。一种是闪光紧急报警,需操作人员手动消音。用于锅炉处于紧急危险状态,必须操作人员紧急处理的情况。
3 软件设计
软件程序由主程序和子程序组成,软件主要抗干扰措施:
3.1 为了防止程序失控设立了软件陷阱
当程序由于外部干扰或硬件瞬时故障使得程序计数器偏离了原定的值,如PC应加3,由于上述原因实际加2,程序将会把操作码和和操作数混淆起来,造成一系列错误。为防止这种情况,在RAM中,每隔十几条指令,把连续的几个单元置成"00"(空操作)。当程序失控是,只要进入这众多的软件陷阱中的任何一个,都会被捕,连续进行几个空操作,程序自动恢复正常,继续执行后面的程序。
3.2 为防止程序死循环,采用时间监视器
即利用计数器靠系统时钟进行记数,当计数器满时,将由计数器产生一个复位信号,强迫系统复位,使系统重新执行程序。在正常情况下,每隔一段时间,程序使计数器清零,这样,计数器就不会计满,因而不会产生复位。但是如果程序陷入死循环,计数器将计满而产生溢出信号,是系统复位,程序重新开始启动。可以消除外部对程序的干扰。
4 结 论
采用新型单片机和新型传感器技术对锅炉系统进行自动控制改造,成本低,技术先进,功能强,硬件电路简单,软件设计简洁,可靠性高,系统二次开发空间大,很有应用前景。
[1] 何立民编著. 单片机应用系统设计[M].北京:北京航空航天大学出版社,1998.
[2] 何立民编著. 单片机应用技术选编(二)[M].北京:北京航空航天大学出版社,1997.
[3] 胡汉才编著. 单片机原理及其接口技术[M].北京:清华大学出版社,1996.
[4] 张毅刚,彭喜源,谭晓均编著. MCS-51单片机原理应用设计[M]. 哈尔滨:哈尔滨工业大学出版社,1997.
[5] 李朝青. 单片机原理及其接口技术[M]. 北京:北京航空航天大学出版社,1998.
[6] 武庆生,仇梅编著. 单片机原理及应用[M]. 成都:电子科技大学出版社,1998.
[7] 马洪斌,马 岩,杨春梅.蒙特卡罗法在热磨机磨片优化设计中的应用[J].森林工程,2012,28(5):28-32.
[8] 纪宁南编著. 单片机外围器件实用手册(输入通道器件分册)[M]. 北京: 北京航空航天大学出版社,1998.
[9] 陈粤初,窦振中,关悌远,刘伟民编著. 单片机应用系统设计与实践[M]. 北京:北京航空航天大学出版社,1998.
猜你喜欢
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
机械管理开发(2022年1期)2022-03-24
发电设备(2020年5期)2020-10-09
汽车与驾驶维修(维修版)(2019年3期)2019-05-08
山东工业技术(2016年15期)2016-12-01
汽车与新动力(2014年5期)2014-02-27
中国新技术新产品(2011年23期)2011-12-31
中学生数理化·七年级数学人教版(2008年10期)2008-01-21
