基于CMAC网络的滑模位置控制研究*
2014-08-22 11:23史晓娟西安科技大学机械工程学院西安710054
机床与液压 2014年24期
史晓娟西安科技大学机械工程学院,西安 710054
1.Introduction
The performance of position servo system for NC machine tool directly affects the machining accuracy of machine tool,while the performance of position servo system is closely related to its control strategy.The position servo system of NC machine tool is one nonlinear time-varying system containing numerous uncertainty.The structure or parameter of its mathematics model is not very accurate.The uncertainty causing by parameter variation and external disturbance is a troublesome problem for position servo system.When this kind of uncertainty has more serious influence on the servo system,the traditional PID and self-adaptive control method can’t obtain the satisfied control requirements[1-2].Whereas the sliding mode variable structure control can effectively control the controlled objects possessing parameter variation and external disturbance by the continual adjustment and change of controller structure.It can guarantee the control system has strong robustness and adaptability[3-4].But its dominant shortcoming is chattering problem.The chattering confines its farther application and development.Many improved method has been proposed in available literatures,but the effect is still unsatisfactory.The main methods have boundary layer method,reaching law method,high-gain continuous method,control method based on state and so on[5-7].
Cerebella model articulation controller(CMAC)is a kind of form query type adaptation neural network,it can express complicated nonlinear function.CMAC is different from BP network.It possesses local approximation capabilities,continuous input output capabilities and certain generalization capabilities.Its structure is simple and has rapid study speed.Therefore it is fit for real-time control[8].Therefore the paper combines CMAC with sliding mode control to eliminate chattering.
2.The neuron sliding mode control system based CMAC
The idea of sliding mode is that regards the square of switch functional as a kind of performance criterion and makes this performance criterion arrive at optimization by the definite control algorithm.Thereby the state trajectory starting from any point of state space can arrive and keep on the switch plane.Because the switch plane is preselected and the movement on the switch plane affect by system performance and external disturbance,therefore state trajectory should ultimately move along switch plane and arrive at the origin of state space.
Combining CMAC with slide mode control,the paper proposed neuron slide mode control method.The structured flowchart of control system is shown in Figure 1.Where r is the given signal,y is the output signal of system,uPIDis the output of controller,uCMACis the output of CMAC,u is the controlled variable,e is error.Differential operator vector is.We can find each order differential coefficient vector of error x according to differential vector operator, that is x =.Planner presents expectant switch function sr,actual switch function of system is s=CTx.

Figure 1.The system structure diagram of neuron sliding mode control based on CMAC
In the system shown in Figure 1,select PID controller as the teacher signal of CMAC.In the initial moments,the content of each unit in CMAC are all zero.Therefore,CMAC does not react on control.System is controlled by PID controller.Once the system is up and running,learning algorithm of CMAC continually compares uCMACwith u,adjusts weight of each corresponding unit in CMAC storage with their error and makes error gradually decrease.When uCMACand u are equal,that means the output of PID controller is zero.The system is controlled by CMAC controller,CMAC stops learning at this point.Therefore,as long as the output of PID controller is not equal to zero,CMAC must start learning.PID controller based on neuron adopts the idea of sliding mode control to design,that is the adjustment of PID parameter will automatically conduct according to the error between ideal switch function(sr(x))and practice switch function(s(x)).Therefore when its output is zero,it shows state trajectory arrives at expectant switch plane.CMAC also accomplishes the learning process of control law required by the expectant control effect.The more training frequency of CMAC,the more accumulated experience,the more high imminent accuracy,the more exact control.The control strategy is actually a kind of continuous control.It has no longer switching function.Therefore,it can not appear the chattering causing by the switch of control.
3.The control algorithm of system
Supposing discrete state equation of system is:

Where x(k)is n dimension state vector,A is n × n dimension coefficient matrix,B is n ×1 control matrix,u(k-1)is control quantity and has equation as shown below:

Where uPIDand uCMACare the control variables from PID controller and CMAC respectively.We select switch function as follows:

Where C=[c1,c2,…,cn-1,1]T,ciis real number.
In this control strategy,CMAC network concurrently put onto PID controller based on neuron.When system just starts to run,set weight of CMACto zero.Now the output of CMAC(uCMAC)is zero,system is controlled by PID controller based on neuron.Along with continual study,the output of PID based on neuron(uPID)gradually becomes zero and the output of CMAC(uCMAC)gradually approaches the total output of controller.
3.1.PID control algorithm based on neuron
In order to determine parameters of PID controller,introduce neuron self-adaptive component(Adaline)and construct PID control based on neuron.It can automatically adjust parameters of PID controller according to the error between ideal switch function(sr(x))and practice switch function(s(x)).Compared with traditional PID control,the discrimination is that parameters of PID control based on neuron need to adjust by learning algorithm.Learning algorithm is only simple iterated operation,so the realtime performance is strong.The learning of weight coefficient must ensure the error between ideal switch function and practice switch function tender to zero.As long as the error exists,the process of learning will make weight change.Sequentially make the error rapidly tend to zero.As long as we guarantee the astringency of learning algorithm,control system can guarantee state trajectory arrive at expectant switch plane.Furthermore,the system has gained greatly in anti-disturbance ability and is not sensitive to the change of parameters owing to self-organization and self-learning characteristics of neuron.
PID algorithm adopts increment form,that is:

Where wi(k)is undetermined parameters of PID,and has:

The performance criterion is selected as follows:

Then adjusting algorithm of network weight adopting gradient descent method is as follows:

Where η is learning rate,the following equation can be deduced by equation(6):

In the process of iteration,we may use s(k-1)approximately replace s(k).
3.2.The learning algorithm of CMAC
CMAC is a kind of associative network.Only a small number of neuron associate with it for each input variables.The CMAC has partial generalization ability.That is similar input brings similar output,whereas removed input brings independent output.The specific realization of CMACis that input space S is divided into a number of subspaces.For any input vector Si,find corresponding c cells and add weights of c cells together,thus the output of network is shown as follows:

Whereαi(k)is address selection vector of CMAC storage,c is generalization constant,wi(k)is weight of each cell in CMAC storage.
The working process of CMAC is divided into two parts:control and learning.After the finish of each control cycle,it executes one step training and figures out the output of CMAC.Compared with total control output,it modifies weight and starts learning.Through learning,the error between total control output with CMAC output will be minimal and the total control output of system will mainly bring by CMAC at last.The weight adjustment of CMACnetwork generally adopts simple δrule,it is described as follows:

WhereΔwi(k)is each weight adjustment of c cells in CMAC storage,β is learning rate of network.
4.Simulation research
In order to verify the control performance of neuron sliding mode controller based on CMAC,we do the simulation research of position servo system for numerical control machine tool.We choose sampling period to be 4 ms.The error state equation of the position servo system is shown as follows after discretization:

The switch function is chosen as follows:

For neuron sliding mode control algorithm based on CMAC,the parameters are chosen as follows:η=0.01,c=20,β =0.1.
When input instruction of system is 50 r/min,the simulation results are shown as Figure 2 and Figure 3.In Figure 2,(a)and(b)are respectively slope response curve and control quantity curve when we adopt general sliding mode control algorithm.In Figure 3,(a)and(b)are respectively slope response curve and control quantity curve when we adopt neuron sliding mode control algorithm based on CMAC.From simulation results,we can see that neuron sliding mode control strategy based on CMAC can greatly decrease the chattering existing in general sliding mode control and can effectively improve the dynamic quality of system.
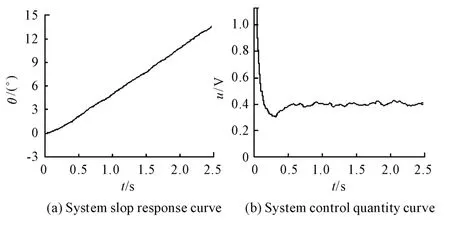
Figure 2.Curves when adopting general sliding mode control algorithm

Figure 3.Curves when adopting neuron sliding mode control algorithm based on CMAC
5.Conclusion
Because of chattering phenomena of sliding mode variable structure control,neuron sliding mode control algorithm based on CMAC was designed by the effective combination of sliding mode control and CMAC network.Then the paper applies this control algorithm to position servo control of NC machine tool.Through simulation research compared with general sliding mode control,it shows that the control method can greatly decrease the chattering phenomenon.It also shows the position servo system has better dynamic performance and strong robustness.Furthermore,the control algorithm is simple,easy to realize and has high real time.It is a kind of effective control algorithm that can solve the control problem of nonlinear and uncertainty objects.
[1] Elbayomy K M,Jiao Zong-xia,Zhang Hua-qing.PID Controller Optimization by GA and Its Performances on the Electro-hydraulic Servo Control System[J].Chinese Journal of Aeronautics,2008(21):378-384.
[2] Li M G,Li X,Liu D.Fuzzy PIDControl of Motor Servo System Based on DSP[J].Measurement& Control Technology,2011,30(6):64-67.
[3] Cheng Gong.Direct capacitor power control of dual PWM converter based on sliding mode variable structure[C]//2012 IEEE Innovative Smart Grid Technologies,2012(5):1-5.
[4] Di Bao,Wei Huo.BLDCM Servo Control Using a Novel Predictive Variable Structure Control Strategy[C]//2012 International Conference on Automatic Control and Artificial Intelligence,2012(3):613-617.
[5] Wang F Y.Sliding variable control[M].Beijing:Machinery industry press,2001.
[6] Defoort M,Floquet T,Kokosy A,et al.A novel higher order sliding mode control scheme[J].Systems & control Letters,2009(58):102-108.
[7] ZOU W Q,YAO X F.A new variable structure controller[J].Modular Machine Tool& Automatic Manufacturing Technique,2006(1):53-55.
[8] Feng D,Zhou W X,Xu L.Online Learning Control of an Intelligent Mobility Aid Using CMAC Neural Network[J].Control Engineering of China,2013,20(2):295-300.
猜你喜欢
中国机械工程(2022年22期)2022-11-25
音乐天地(音乐创作版)(2022年1期)2022-04-26
音乐天地(音乐创作版)(2022年1期)2022-04-26
中国机械工程(2022年7期)2022-04-20
中国机械工程(2019年17期)2019-09-19
当代陕西(2019年6期)2019-04-17
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
中国机械工程(2018年4期)2018-03-06