
基于多体系统理论的五轴数控机床空间几何误差建模*
2014-08-21 05:14:10钟建琳
机械研究与应用 2014年2期
曹 力,钟建琳,米 洁
(北京信息科技大学,北京 100192)
0 引言
五轴数控机床是实现复杂曲面零件的高效高精度加工的重要加工设备,代表着一个国家机械制造业的发展水平,对一个国家的航空、军事、科研、精密器械等行业有着至关重要的影响力。但是由于数控机床在制造、控制、装配等各个环节以及在加工过程中产生的热变形、振动、摩擦等各种误差的影响[1],使得数控机床的实际加工轨迹与理想轨迹不能完全吻合,引起了加工误差,进而影响了加工工件的精度。因此对五轴数控机床进行误差补偿意义重大,而准确建立误差模型是进行误差补偿的必备条件,所以对五轴数控机床进行几何误差建模研究很重要。
多体系统是对一般复杂机械系统的完整抽象和有效描述,可以用若干柔性或刚性体通过某种方式连接而成[2],在实际应用中的机械系统都可以抽象成多体系统,目前已经在数控机床、机器人、坐标测量机等复杂机械系统中应用。
1 基于多体系统理论空间几何误差建模
多体系统理论的核心是运用多体系统拓扑结构的关联关系对多体系统中的相邻体及其变换矩阵进行分析。拓扑图与低序体阵列是多体系统理论中描述相邻体之间关联的基本方法。
1.1 多体系统中拓扑结构和低序体阵列
拓扑结构是对多体系统本质的抽象与概括,而低序体阵列则是描述拓扑结构的常用方法。一般设惯性坐标系R为B0体,选择任意一体为B1,然后沿远离B1的方向按自然增长的数列标定每个物体的序号,标定到系统的各分支直至全部物体都标定完毕[3]。

图1 五轴数控机床机构简图
对于如图1所示的五轴数控机床,可以抽象成如图2所示的拓扑结构简图。
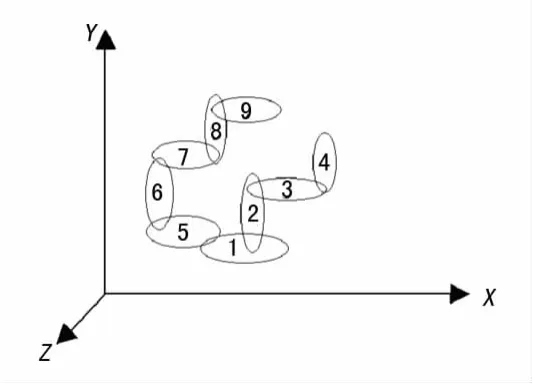
图2 五轴数控机床拓扑结构简图
在多体系统分析中,拓扑结构的单元称为体。低序体阵列通过如下算法得到:
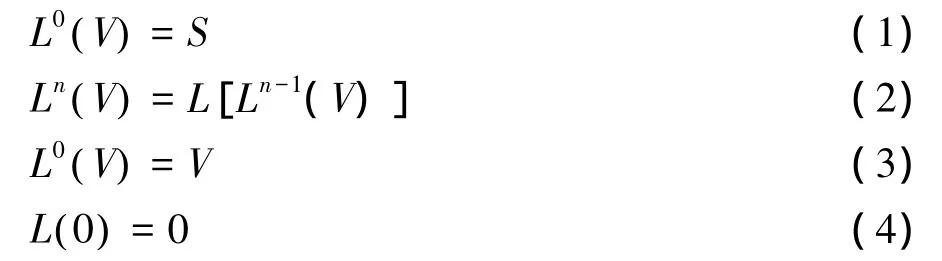
式中:L称为低序体算子。
当L(V)=S时,称体S是体V的相邻低序体,显然体V是体S的相邻高序体。从而得到图2所示的拓扑结构的低序体阵列表。如表1所列。

表1 五轴数控机床低序体阵列表
1.2 多体系统相邻体之间的位姿描述
在多体系统中,体与体之间的位姿由初始位姿、运动位姿和误差位姿确定。假定在某一多系统中,典型体S及其相邻体V如图3所示。
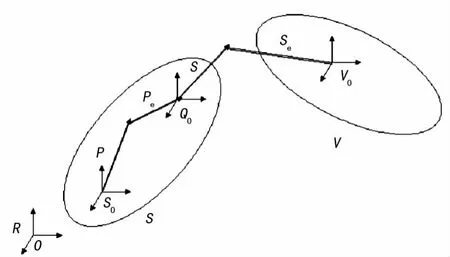
图3 典型体S及其相邻体V
其中Qo是典型体V参考坐标系的原点,相对于体S坐标原点So的位置矢量P与位置误差矢量Pe。Vo是典型题V的体坐标系原点,V相对于S的移动用位移矢量S和位移误差矢量Se表示。
1.3 建立多体系统坐标系
在多体系统中,相邻体之间的关系转换为相邻体坐标系之间的关系。
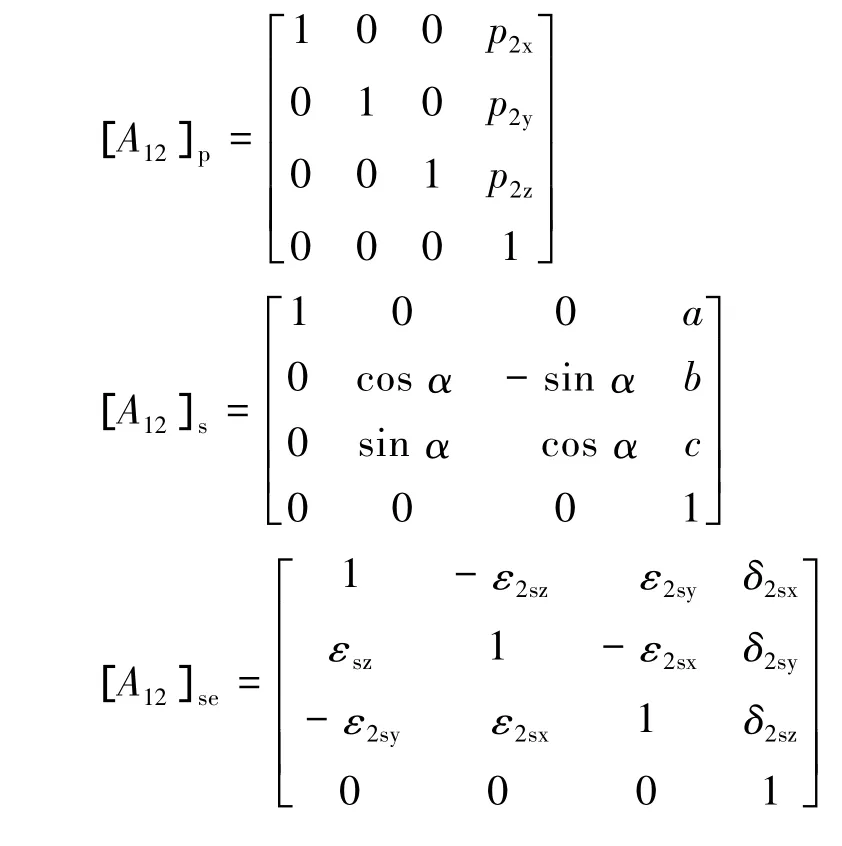
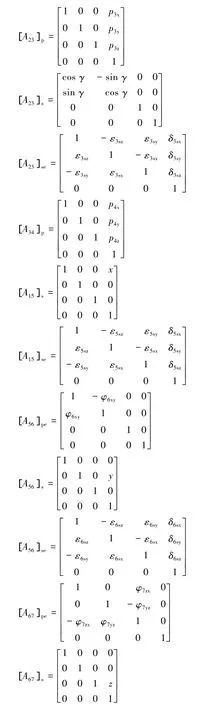
如图1所示,在床身与工件分支中,由于床身放置在地面上静止,所以床身的体坐标系与其惯性参考坐标系重合;2体的理想运动参考坐标系相对于床身的体坐标系平移一个矢量{P2}={P2x,P2y,P2z}T,实际运动参考坐标系与理想运动参考坐标系重合,3体的理想运动参考坐标系相对于2体的体坐标系平移一个矢量{P3}={P3x,P3y,P3z}T,实际运动参考坐标系与理想运动参考坐标系重合,4体的体坐标系、理想运动参考坐标系和实际运动参考坐标系重合,相对于3体的体坐标系平移一个矢量{P4}={P4x,P4y,P4z}T。
在床身与刀具分支中,5体的理想运动参考坐标系,实际运动参考坐标系与床身的体坐标系重合。6体的理想运动参考坐标系与5体的体坐标系重合,实际运动参考坐标系相对于5体的体坐标系转过垂直度误差φ6xy,7体的理想运动参考坐标系与6体的体坐标系重合,实际运动参考坐标系相对于6体的体坐标系转过垂直度误差φ7zx和φ7yz,8体的理想运动参考坐标系相对于7体的体坐标系平移一个矢量{P8}={P8x,P8y,P8z}T,实际运动参考坐标系与理想运动参考坐标系重合,9体的理想运动参考坐标系相对于8体的体坐标系平移一个矢量{P9}={P9x,P9y,P9z}T,实际运动参考坐标系与理想运动参考坐标系重合。
2 多体系统相邻体之间特征矩阵[4-5]
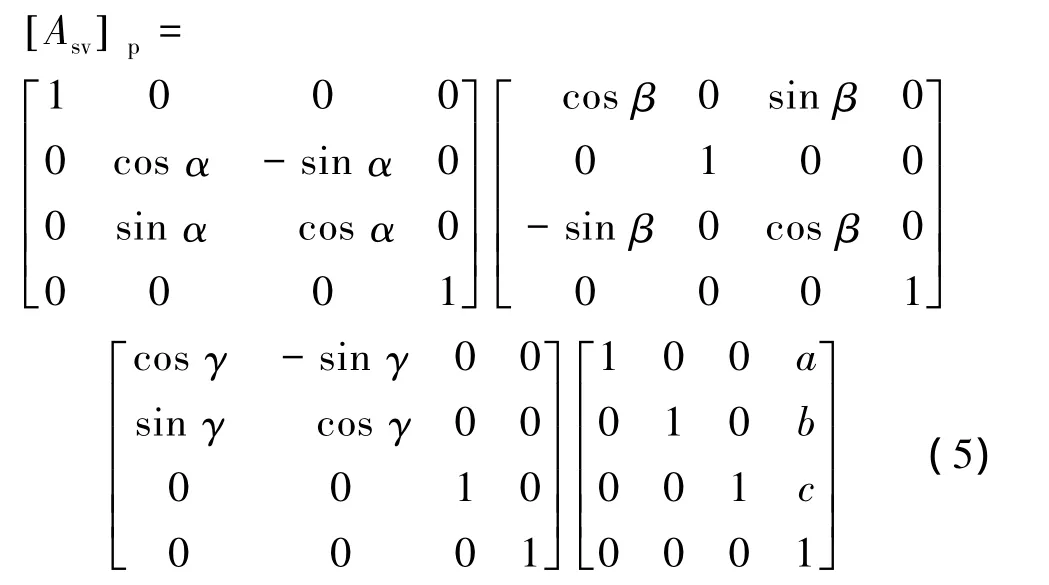
在多体系统中,体坐标系之间的关系可以由4×4阶齐次Denavit-Hartenberg齐次矩阵来描述。相邻体之间的实际位姿,可由位置位姿特征矩阵、运动位姿特征矩阵及其误差位姿特征矩阵确定。
在有误差的多体系统中,相邻体S、V的位置位姿特征矩阵为:
位置位姿误差特征矩阵为:
式(5)~(8)中:α,β,γ 代表坐标系 S、V之间的静止姿态,a,b,c代表坐标系S、V之间的静止位置,εpx,εpy,εpz,δpx,δpy,δpz分别表示相对位置误差矢量在X,Y,Z 轴的回转误差与移动误差,θx,θy,θz代表坐标系S的X,Y,Z轴绕坐标系V的X,Y,Z轴的回转角,εsx,εsy,εsz,δsx,δsy,δsz分别表示相对位移误差矢量在X,Y,Z轴的回转误差与移动误差。
即相邻体之间的变换矩阵为:

于是可以写出五轴数控机床各个相邻体的理想特征矩阵和误差特征矩阵如下(未注明矩阵为单位矩阵):

3 空间几何误差模型的建立[6-8]
设五轴加工中心刀具切削刃中心点Q在刀具坐标系中的坐标为 Qt=(Qx,Qy,Qz,1)T,在理想情况下,工件在回转工作台坐标系中的坐标为P,所以:

即点Q在工作台的理想坐标系与实际坐标系之间的差值为:

即:

式(10)即为该五轴数控机床的空间几何误差模型。依据数控机床的误差辨识参数即可得到上述特征矩阵,代入式(10)得到空间几何误差模型数学表达式。
4 结语
基于多体系统理论,以低序体阵列构建五轴数控机床的空间几何误差模型,该方法简单、明确具有通用性和灵活性,可实现应用计算机来进行快速建模,通过该模型可以对数控机床进行误差补偿,提高加工精度进而达到理想的加工效果。
[1]粟时平,李圣怡.五轴数控机床综合空间误差的多体系统运动学建模[J].组合机床与自动化加工技术,2003(5):15-18,21.
[2]郭 辰,杨 林,李庆勇.基于多体系统理论的数控机床误差建模[J].机械设计与制造,2005(3):123-125.
[3]李欢玲,缪群华,赵 宇,等.基于多体系统理论的五轴加工中心几何误差建模[J],中国制造业信息化,2007,36(19):16-19.
[4]刘丽冰,王广彦,刘又午.复杂机械系统运动误差自动建模技术研究[J].中国机械工程,2000,11(6):642-646.
[5]休斯敦,R.L,刘又午.多体系统动力学(上)[M].天津:天津大学出版社,1987.
[6]王秀山,杨建国,闫嘉钰.基于多体系统理论的五轴机床综合误差建模技术[J],上海交通大学学报,2008,42(5):761-764.
[7]朱赤洲.数控机床三维空间误差建模及补偿技术研究[D].南京:南京航空航天大学,2012.
[8]李贤元,孟 文,周 奎.五轴数控机床后置处理算法研究[J].机械,2009(10):45-47.
猜你喜欢
制造技术与机床(2019年12期)2020-01-06 03:17:26
制造技术与机床(2018年12期)2018-12-23 02:41:20
电子制作(2018年10期)2018-08-04 03:24:46
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
中等数学(2017年2期)2017-06-01 12:21:50
电子制作(2017年20期)2017-04-26 06:57:41
光学精密工程(2016年5期)2016-11-07 09:05:55
光学精密工程(2016年4期)2016-11-07 09:05:11
湖北工业大学学报(2016年5期)2016-02-27 13:14:48
