机电复合传动装置参数匹配优化研究
2014-08-21 07:22:24盖江涛
车辆与动力技术 2014年3期
袁 艺,盖江涛,张 欣,万 帆
(中国北方车辆研究所车辆传动重点试验室,北京 100072)
对于履带车辆,直驶动力性和转向性能是其最重要的性能,传动装置参数匹配的合理性对车辆性能有着直接的影响.因此,为提高车辆的性能,建立机电复合传动装置参数优化数学模型是非常必要的.本研究将针对某双侧电机耦合驱动的传动装置,对其性能评价指标和参数优化建模方法进行探讨.
1 机电复合传动装置性能评价指标
某双侧电机耦合驱动的传动装置简图[1]如图1所示.该传动装置由两个驱动电机及其减速排、功率耦合机构及两侧的变速排组成.电机减速排传动比为ij,功率耦合机构由若干行星排构成,行星排参数为ko,变速排为两挡,传动比分别为 ib1、ib2,将其写成集合的形式为.
当双侧电机输出转速相同时,车辆直线行驶;当双侧电机输出转速不同时,车辆差速转向.功率耦合机构是实现双侧电机耦合驱动的关键,它可以将再生转向功率由低速侧履带传递至高速侧履带,但传递功率的多少取决于功率耦合机构行星排参数.

图1 双侧电机耦合驱动传动装置简图
1.1 直驶动力性能评价指标
利用电机调速可以实现串联式混合动力履带车辆直驶无级变速,但是履带车辆行驶工况复杂,并且囿于目前电机及其控制器的设计制造水平,车辆车速范围及输出扭矩范围要求无法同时满足.因此,需要在电传动装置中设置了能实现两个挡位的行星变速机构,以同时满足输出转速和扭矩的需求.低速挡的传动比为ib1,高速挡为直接挡ib2=1.如图2所示,电机在恒功率区时,A1B1和A2B2段为双曲线.

图2 车辆驱动力图
B1点和A2点的车速之比为λ/ib1,λ为电机弱磁比.
当ib1<λ时,λ/ib1>1,vB1>vA2,FB1<FA2,低速挡可输出的最大驱动力降低.
当ib1>λ时,λ/ib1<1,vB1<vA2,FB1>FA2,换挡时出现动力中断的情况.
当ib1=λ时,λ/ib1=1,vB1=vA2,FB1=FA2,此时,B1点和A2点重合,传动装置既可以输出较大的驱动力,又不会出现动力中断,因此,这是最理想的驱动力图.
所以,可以用电机弱磁比λ与低速挡传动比ib1的关系,定义出传动装置直驶动力性能指标:

f1越小,传动装置的直驶动力性能越好.当f1=0时,直驶动力性能最优.
1.2 转向性能评价指标
对图1所示的某机电复合传动装置进行运动学和动力学分析[2],当车辆以质心速度V、相对半径ρ转向时,两侧电机的转速以及需要输出的扭矩分别为:

式中:nm1和nm2分别为内外侧电机转速;Tm1和Tm2分别为内外侧电机输出扭矩;ic为侧传动比;r为主动轮半径;G为车重;L为履带接地长;B为履带中心距;f为滚动阻力系数;μ为转向阻力系数;η为传动装置输入端至履带的效率.
令nm1=0,得到

令Tm1=0,得到

如图3所示,当ρn<ρ<ρT时,内侧电机工作在发电模式,有一部分再生功率通过内侧电机进入电循环,一部分再生功率经过中间的耦合机构通过机械循环到达外侧履带.在设计过程中,希望所有再生功率都能够通过效率较高的耦合机构传递到外侧履带,因此该半径范围越小越好.
所以,可以用ρn与ρT的关系定义出传动装置转向性能指标:

f2越小,传动装置的转向性能越好.当f2=0时,转向性能最优.
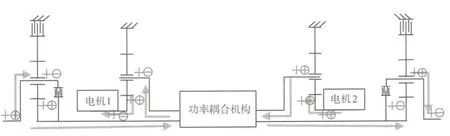
图3 ρn<ρ<ρT传动装置功率流图
2 机电复合传动装置参数优化模型
在设计机电复合传动装置时需要确定多个参数,参数之间的匹配是否合理决定着传动装置的性能好坏.本研究以传动装置的直驶动力性能和转向性能为优化目标,选取传动装置主要参数作为设计变量,以设计指标和相关部件的制造条件为约束,得出机电复合传动装置参数优化模型描述.
2.1 设计变量
设计变量X为:电机弱磁比λ、电机最高转速nmax、功率耦合机构行星排参数ko、电机减速比ij、变速机构一挡传动比ib1.

2.2 目标函数
综合考虑车辆的直驶性能和转向性能,目标函数为:

式中:δ1和δ2分别为直驶性能指标和转向性能指标的权重,和为1.
2.3 约束条件
1)最高车速指标vmax的约束[3]:

2)最大爬坡度指标αmax的约束[3]:

式中:Pe为单侧电机额定功率;K为电机过载系数.
3)中心转向时间指标tc的约束:

4)中心转向时履带牵引力的约束:

5)防止动力中断的约束:

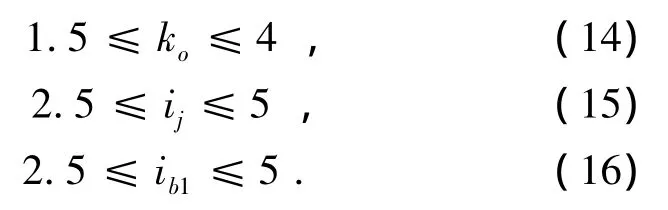
6)行星排结构的约束[2]:
7)电机制造技术的约束:

式中:[λ]为电机可达最大弱磁比;[ nmax]为电机可达到的最高转速.
8)行星齿轮轴承最大转速的约束[2].
电机减速排行星齿轮轴承最大转速

功率耦合机构行星排行星齿轮轴承最大转速出现在中心转向时,

变速排行星齿轮轴承最大转速

式中:[nxjmax] 、[nxomax]及[nxbmax]分别为电机减速排、功率耦合机构行星排及变速排行星齿轮轴承允许的最大转速.
9)电机最大输出扭矩的约束.
由于电机输出扭矩大将导致电机尺寸较大,输出电流过大,因此要对电机的最大输出扭矩进行约束.

式中:[ Tmax]为允许的电机最大输出扭矩.
3 实例分析
由于传动系统参数优化设计的数学描述较复杂,不便于用解析法求解,因此采用数值法求解.遗传算法是解决传动装置参数优化问题的一种有效的数值方法,利用遗传算法对优化模型进行求解[4].
进化过程如图4所示,优化结果如表1所示.图4绘出了进化过程中每代种群适应度的最大值、最小值及平均值.从表1中数据可以看出:优化前电机转速较高,设计难度较大;优化后,电机最高转速降低,弱磁比减小,电机的设计难度降低.

图4 进化过程

表1 优化前后传动装置参数对比
如图5、图6所示,动力因数在优化前后变化很小,低速挡曲线终点与高速挡恒功率段起点基本重合,动力因数曲线的形状较为理想.

图5 优化前车辆动力因数曲线

图6 优化后车辆动力因数曲线
图7、图8所示为在4种典型路面上,优化前后转向再生功率机械回流利用率γ(即通过功率耦合机构回流至高速侧履带的转向再生功率占低速侧转向再生功率的比例)与相对转向半径的关系曲线.
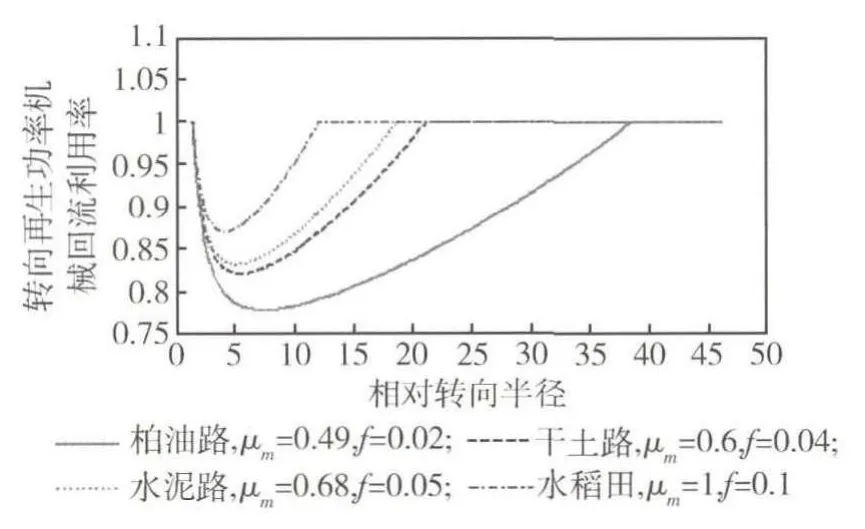
图7 优化前转向再生功率机械回流利用率曲线

图8 优化后转向再生功率机械回流利用率曲线
优化前后,转向再生功率机械回流利用情况如表2所示.优化后,转向时内侧电机工作在发电工况的相对转向半径范围明显减小,尤其在水稻田路面上减小了48.1%;转向再生功率机械回流利用率γ均得到提高,尤其在柏油路面上,转向再生功率机械回流利用率的最低值γmin提高了11.5%.由此可见,优化后,转向再生功率的利用率得到大大提高,传动装置的转向性能得到改善.

表2 优化前后转向再生功率机械回流利用情况对比
4 结论
1)对某机电复合传动装置的驱动力-速度曲线进行了分析,得出以低速挡曲线终点与高速挡恒功率段起点之间的相对位置作为传动装置直驶性能的评价指标;对该机电复合传动装置进行了转向运动学和动力学分析,提出了用转向性能评价指标来反映转向再生功率的利用情况.
2)采用遗传算法对某机电复合传动装置的参数进行了优化.通过对比,优化后的驱动电机的设计难度降低,传动装置的直驶性能及转向性能均得到改善.
[1] 盖江涛,李慎龙,周广明,等.一种履带车辆机电复合传动装置:中国,CN101985279A[P].2011-11-02.
[2] 刘修骥.传动系统分析[M].北京:国防工业出版社,1998.
[3] 余志生.汽车理论[M].4版.北京:机械工业出版社,2006.
[4] 文孝霞,杜子学.基于遗传算法的汽车动力传动系匹配设计变量优化[J].重庆交通学院学报,2005,24(2):128-130.
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:32
中国石油石化(2021年8期)2021-03-30 12:39:14
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
石油化工建设(2019年6期)2020-01-16 08:03:42
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
读者(2018年20期)2018-09-27 02:44:48
电站辅机(2017年3期)2018-01-31 01:46:44
时代农机(2016年6期)2016-12-01 04:07:27
现代工业经济和信息化(2016年4期)2016-05-17 05:35:43
少儿科学周刊·儿童版(2016年1期)2016-03-14 03:56:27