激光跟踪仪与球形反射器综合性能测试研究
2014-08-15 12:17李广云
测绘通报 2014年2期
杨 凡,李广云,王 力
(信息工程大学 地理空间信息学院,河南 郑州 450052)
一、引 言
随着工程应用需求的不断提高,传统极坐标测量技术在精度和速度等方面已无法满足要求,快速获取高精度点云数据显得十分重要。激光跟踪测量技术是继传统单点测量技术之后、激光跟踪仪诞生以来的最新三维极坐标测量技术,并以其高效、实时、全自动化等优势而成为快速获取高精度点云数据的重要手段。激光跟踪测量系统凭借其测量精度高、实时跟踪速度快、范围大、移动便携等独特优势[1],被誉为“移动式三坐标机”,广泛应用于航空航天、汽车制造和计量检测等领域。该系统实现三维坐标测量的主要部件是激光跟踪仪和球形反射器,由于仪器制造、运输震动、长期使用和环境变化等因素的影响,各部件性能会有所变化,从而导致系统整体测量精度无法达到标称精度。因此,定期对激光跟踪仪及球形反射器进行综合性能测试才能保证系统应有的测量精度和正常的工作状态。
目前,国内外已有一些学者进行相关研究。刘欣丽等对球形反射器的光学误差进行了分析,并以猫眼反射器为例,讨论了反射器误差对系统精度的影响[2];杨胜利等讨论了SMR棱镜应用到全站仪测量中的常数测定方法[3];王为农等对激光跟踪仪的动态特性进行了研究,通过设计的标准圆轨迹发生器测试不同转速下跟踪仪的动态性能及测量误差[4];刘万里等研究了激光束入射角变化对角隅棱镜测量精度的影响,指出测量误差随着入射角的增大而增大[5];欧阳健飞等对SMR棱镜的重复性测量精度进行了检验,采用方法是将待检验棱镜与同型号标准棱镜进行重复性比对测量[6];蔡薇等对SMR反射器的各项误差进行了分离,并分别对反射镜顶点与球心轴向误差、径向偏差和面夹角误差进行了讨论[7]。还有一些学位论文涉及该研究内容,如陈曦[8]、赵树忠[9]、徐凤[10]、陈继华[11]等。以上研究内容大都较为单一地对反射器误差进行探讨,本文拟以Leica AT901_B和CCR1.5″为例,针对激光跟踪仪和球形反射器的综合性能,从多个方面进行研究。
二、系统误差分析
本文主要讨论激光跟踪仪和反射器自身误差对系统整体性能的影响,环境因素等暂不考虑。激光跟踪仪包括水平轴、垂直轴、水平度盘、垂直度盘和跟踪镜(双面反射镜)等部件,各部件之间有严格的几何关系,如图1所示。当几何关系不能严格满足时,就会产生测角误差和测距误差,见表1。
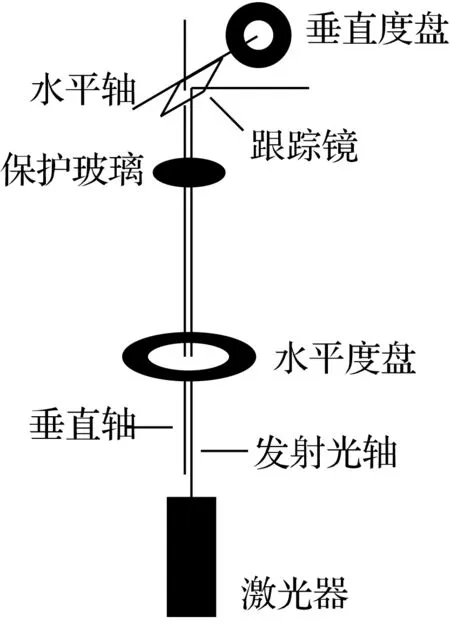
图1 激光跟踪仪的几何结构

测角误差垂直度盘指标差j、垂直度盘偏心差Kx和Ky、激光视线误差c、水平度盘偏心差Ex和Ey、水平轴偏心差e、激光束倾斜误差Ix和Iy、水平轴倾斜误差i、激光束偏移误差Ox和Oy、跟踪镜偏心差f、激光束偏离差O2x和O2y测距误差基距误差C、空气折射率代表性误差Δ1、环境干扰误差Δ3、几何修正误差Δ2
球形反射器由内外两部分组成,外形是标准球体,内部由3片高反射率的镜面两两垂直90°结合形成角锥。反射器误差是指结构误差,主要包括外壳球形度误差、光学中心偏差和反射面夹角误差。外壳球形度误差由制造和磨损造成,约为微米级;光学中心偏差由内外球体不同心造成,包括轴向误差和径向误差;反射面夹角误差由镜面不能严格两两垂直90°造成,一般可通过出射光和入射光的偏角大小衡量[7]。关于激光跟踪仪和反射器的误差模型在参考文献中均有提及,本文不作赘述。
三、AT901_B和CCR1.5″综合性能测试
本文以Leica AT901_B激光跟踪仪和CCR1.5″角隅反射器为例进行综合性能测试,仪器精度指标见表2。
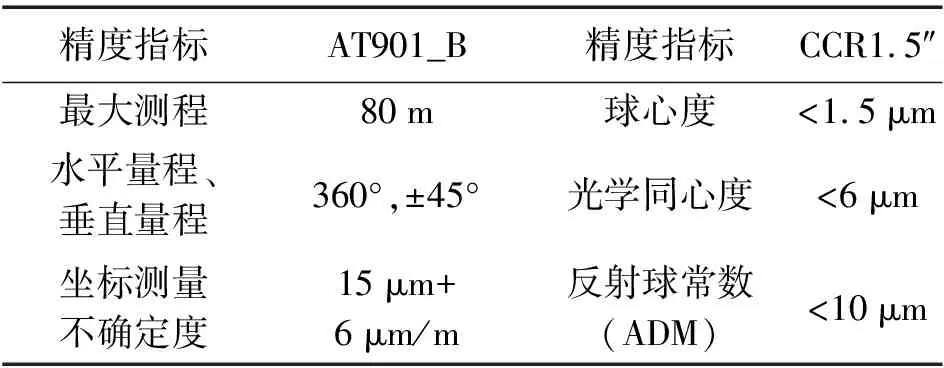
表2 Leica AT901_B标称精度
试验场布置如图2所示,在仪器前方某处固定反射器靶座,并在试验过程中保持较好稳定性。激光跟踪仪在静态测量模式下获取目标CCR1.5″反射器的三维坐标,分别进行反射器球形度精度测试、反射器入射角精度测试、系统精度稳定性测试和断光续接精度测试,动态测量点云离散度测试在双频干涉测距仪滑动平台上进行。首先对试验数据进行粗差剔除、可靠性检验,然后根据最小二乘平差原理计算空间点坐标重复性精度和最大差值等精度指标,即
1. CCR1.5″角隅反射器球形度精度测试
由于制造误差和磨损等因素的影响,激光跟踪仪的反射器外表面不是理想的球面,而存在一定缺陷。这就导致在测量时,反射器不同的放置姿势会产生不同的坐标值,偏差过大的数据将对解算结果造成重大影响,因此必须把反射器球形度误差控制在限差内。在本次试验中,距激光跟踪仪10 m左右安置一个CCR1.5″角隅反射器,反射器正对仪器。采用静态测量模式,每测量一次坐标,反射器绕轴线方向(仪器与反射器的连线)旋转一定角度(大约45°),共记录8个位置的反射器坐标,每个位置重复测量20次,采用单面(I面)观测,计算结果如表3和图3所示。
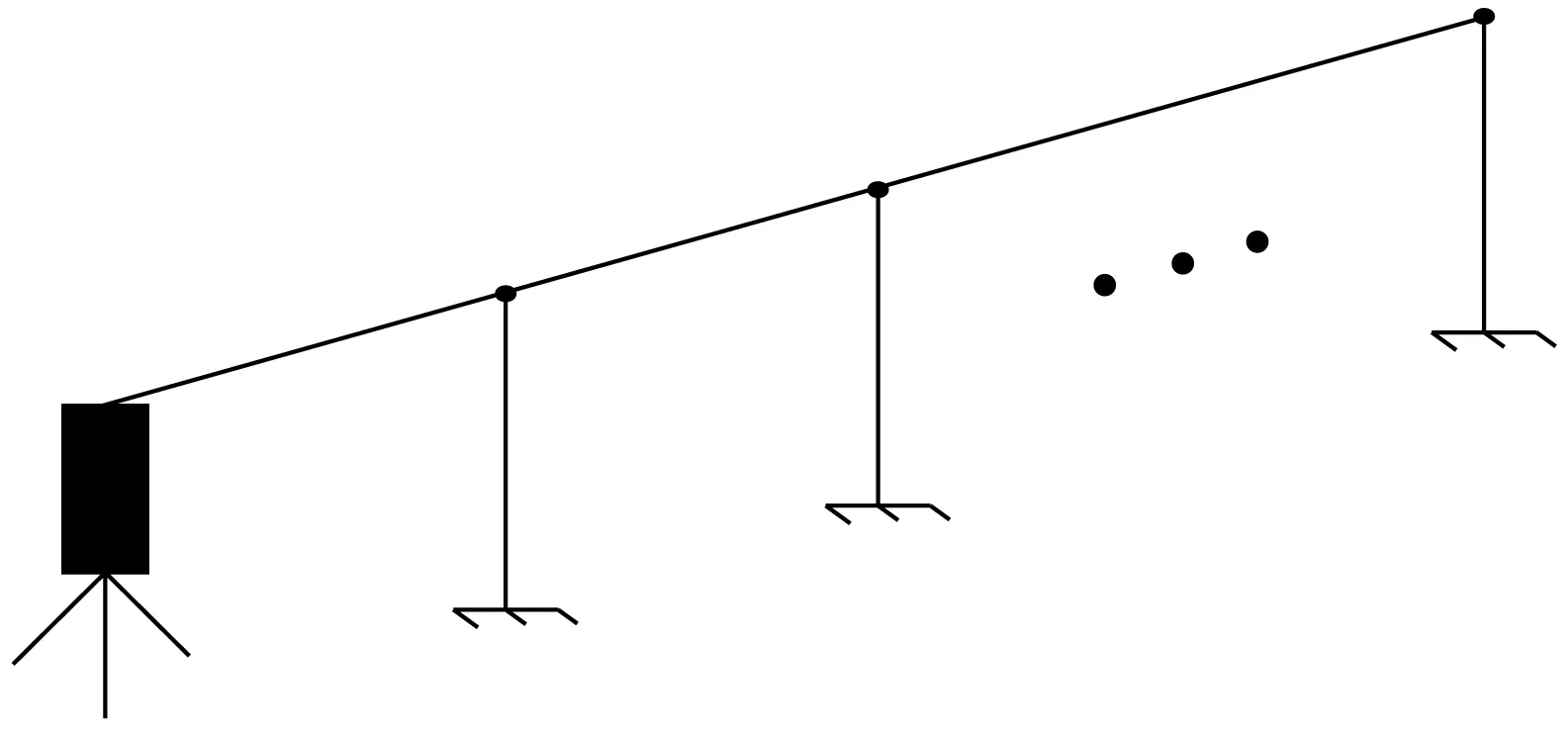
图2 试验场布置
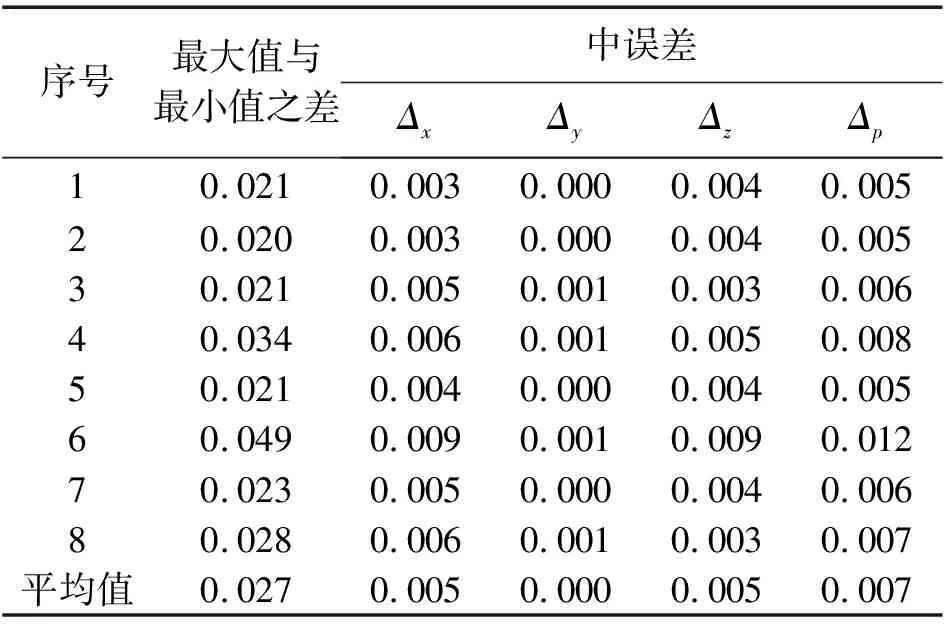
表3 球形度误差 mm
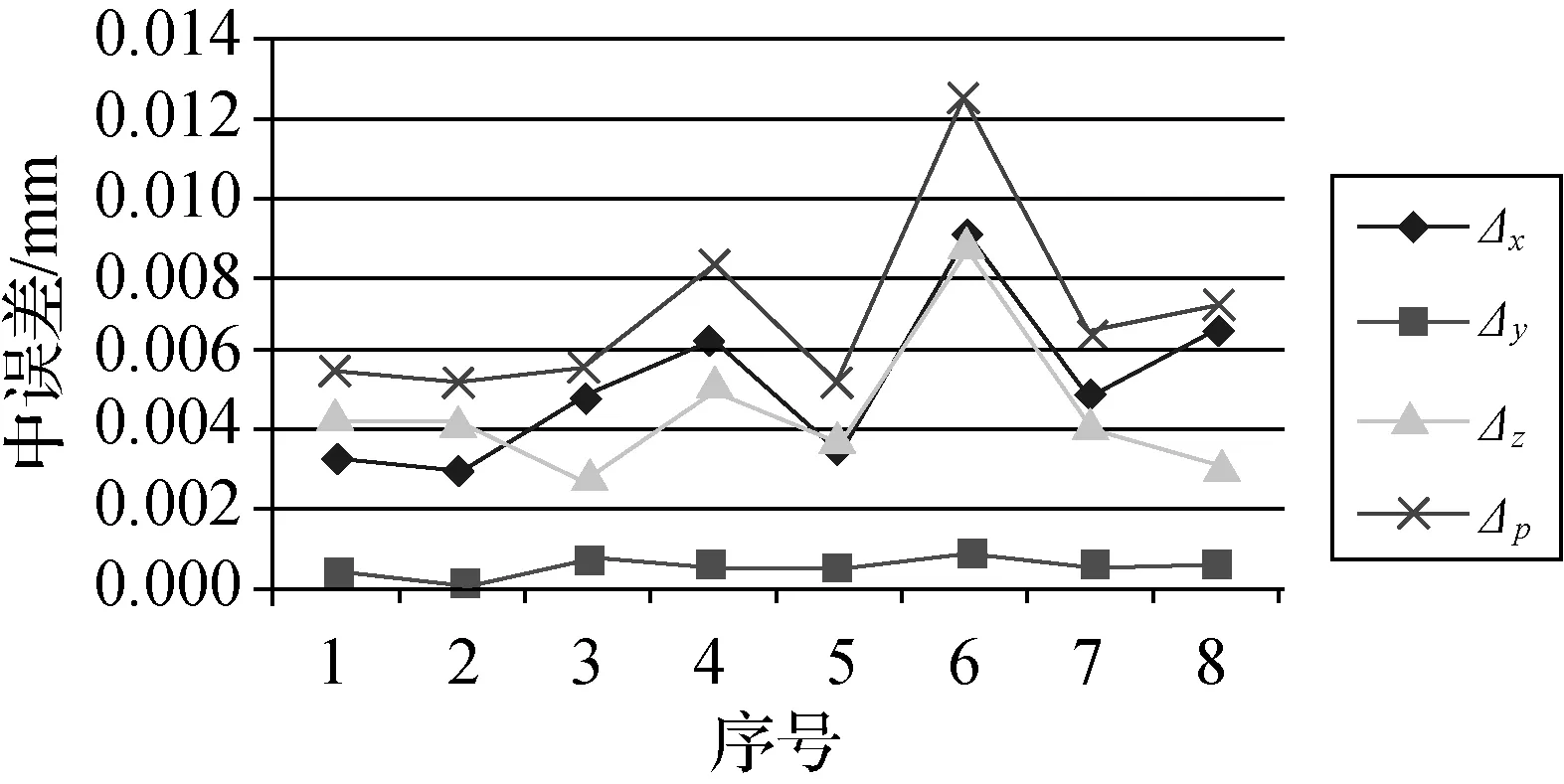
图3 球形度误差分布
从表3和图3可以看出,CCR1.5″角隅反射器球形度误差均值为7 μm, 8个测量位置的误差相当;从坐标误差分量来看,X轴和Z轴坐标误差分量相当,Y轴坐标误差分量几乎为零。这是因为Y轴是激光跟踪仪与反射器的连接方向,基本上不受测角误差的影响。试验结果符合仪器的标称精度15 μm+6 μm/m。
2. CCR1.5″角隅反射器入射角精度测试
激光跟踪仪反射器有规定的入射角范围,Leica CCR1.5″为±50°,在该范围内测量精度将得到保证,若超过一定角度,测量误差就会增大甚至无法得到测量结果。在本次试验中,第一次测量时反射器正对仪器,随后每测量一次,反射器绕铅垂线旋转一定角度(大约10°),共有4个位置,每个位置重复20次静态单面(I面)观测,结果如表4和图4所示。
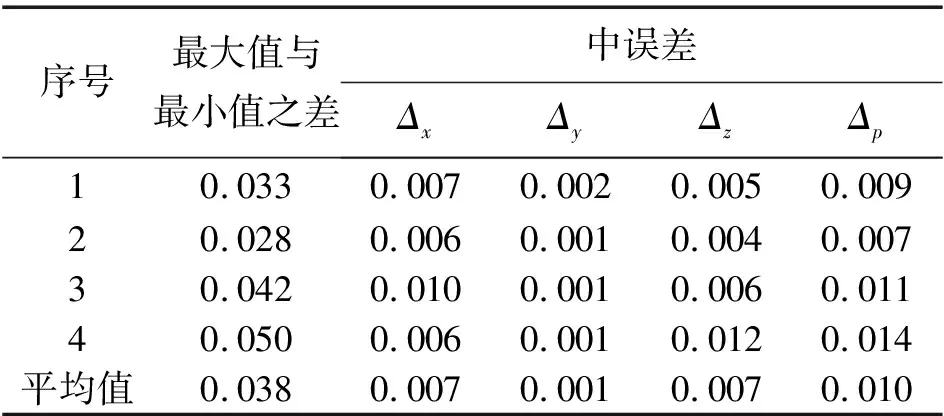
表4 入射角误差 mm

图4 入射角误差分布
从表4和图4可以看出,CCR1.5″角隅反射器入射角误差均值为10 μm,Y轴坐标误差分量最小;入射角不同,误差也不同,而且测量误差随着入射角的增大有逐渐增大的趋势。
3. AT901_B稳定性测试
激光跟踪仪的激光束来源于内部激光管发生器,其稳定性影响测量精度。为了研究激光束稳定性对测量结果的影响,即测量精度随开机时间的变化关系,试验以激光跟踪仪开机后计时,每间隔10 min测量一次10 m远的目标点,每次重复采集20次静态单面(I面)观测数据,结果如表5和图5所示。

表5 仪器稳定性测试精度 mm
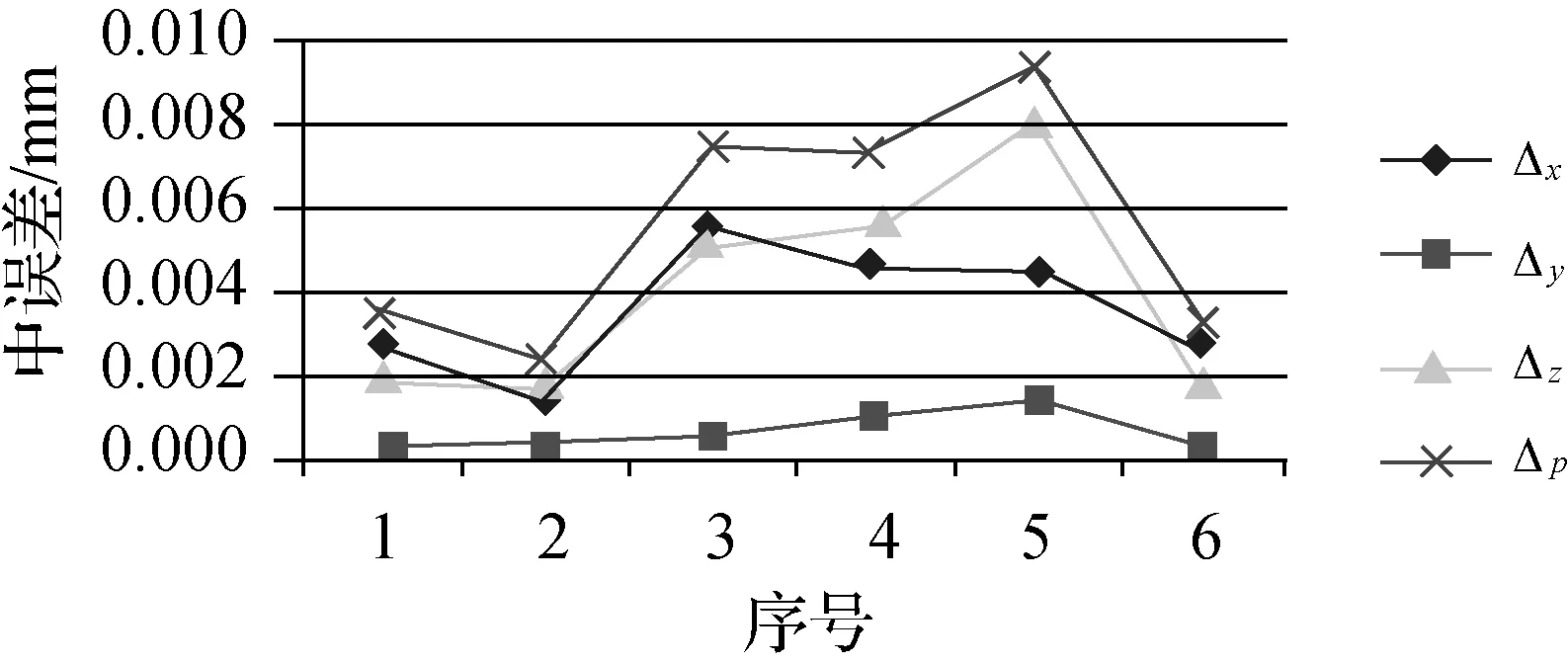
图5 仪器稳定性测试误差分布
从表5和图5可以看出,在开机1 h内仪器的测量精度有一定程度的波动,但幅度不大;坐标重复性精度为2~9 μm,在仪器的标称精度15 μm+6 μm/m范围内。
4. 断光续接精度测试
断光续接是激光跟踪仪实现自动化和智能化的一个重要功能,是指激光跟踪仪在丢失目标后可以自动搜寻并找回目标反射器。从原理上看,激光跟踪仪采用干涉法测距时,当丢失并找回目标后,其采用相位法测量该段距离,而不是使反射器回到鸟巢位置,这样精度应该会有所损失,但仪器厂家并不如此认为。因此,本试验将验证断光续接是否存在精度损失。将反射器从鸟巢位置拿到目标靶座后,进行20次静态单面(I面)观测,记录非断光数据;将反射器从鸟巢位置拿到目标靶座后断开激光束,然后续接并进行20次静态单面(I面)观测,记录断光续接数据。将两者数据处理,比较两者精度。试验在由近及远的6个位置4 m、10 m、16 m、21 m、28 m和38 m进行测量,从而反映断光续接精度与距离的关系,结果如表6和图6所示。
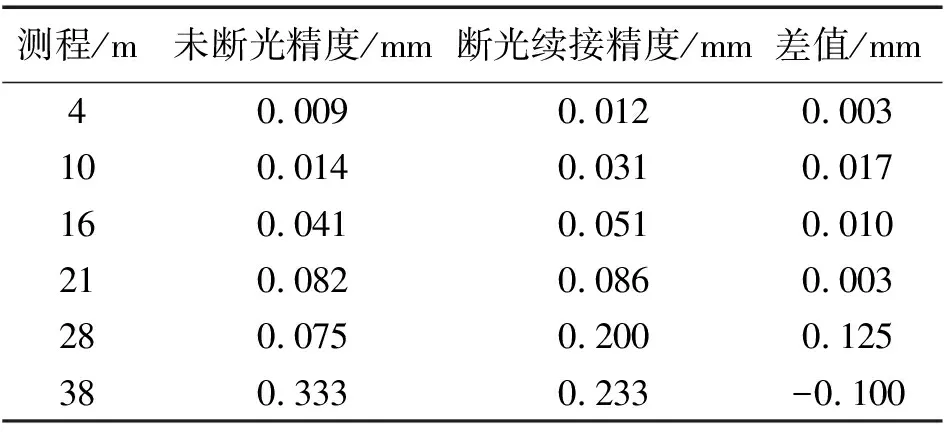
表6 断光续接测试精度
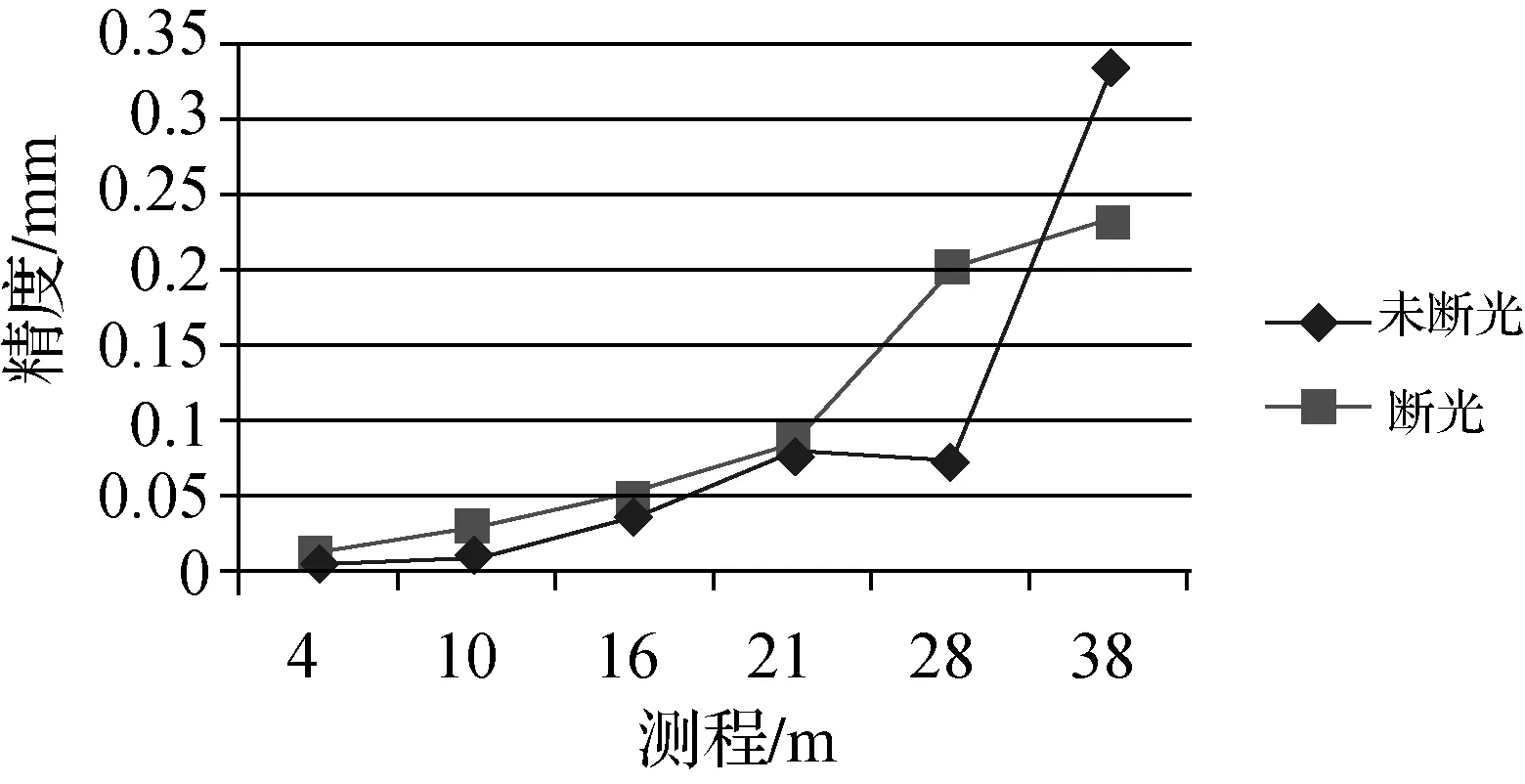
图6 断光续接精度趋势
从表6和图6可以看出,Leica AT901_B的断光续接精度比正常精度要低,说明断光续接存在一定的精度损失;无论断光与否,仪器的坐标测量精度随点距离的增大而增大;第6个点(38 m)在未断光精度测量过程中存在震动,导致测量结果有较大偏差。
5. 动态性能测试
激光跟踪仪区别于传统仪器的最大特点就是快速动态跟踪测量,该模式可快速获取高精度海量点云数据,通常在逆向工程、大型结构件检测等领域应用较多。前面试验均采用静态测量模式,精度基本控制在20 μm内。动态跟踪坐标精度测试是在双频激光干涉仪的滑动导轨上进行,目标点从2 m处开始移动,每移动1 m停下并测量一次,测量模式选择为按时间动态测量,设定每1ms记录一次数据,共进行27次单面(I面)测量,计算结果如图7所示。试验得到的坐标中误差范围为0.003~0.74 mm,均值为0.024 mm,可满足AT901_B的标称精度15 μm+6 μm/m。从图7还可以看出,点坐标精度随空间点距离的增大而增大。
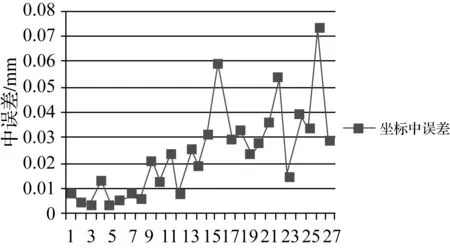
图7 动态跟踪测量精度
四、结束语
本文对激光跟踪仪与反射器的综合性能测试方法进行了研究, 包括反射器球形度精度测试、 反射器入射角精度测试、 系统精度稳定性测试、 断光续接精度测试及动态测量点云离散度测试等,并以Leica AT901_B激光跟踪仪和CCR1.5″反射球为例进行试验,得出了很多有效结论。试验结果表明:① 在没有损坏的情况下,反射器误差对测量精度的影响较小,一般可控制在20 μm内;② 激光束断光续接对精度的影响较大,尤其是距离远的点更大,因此在测量中应尽量保证不断光,或者在断光后回鸟巢重新获取基准距离;③ 仪器测量稳定性及动态测量精度均在标称精度范围内。
参考文献:
[1] 李广云,李宗春.工业测量系统原理与应用[M].北京:测绘出版社,2010.
[2] 刘欣丽,张国雄,李杏华.激光跟踪测量系统中的光学误差分析[J].光学技术,2004,30(2):245-248.
[3] 杨胜利,满开第,蔡国柱,等.SMR棱镜常数测定[J].测绘技术装备,2004,6(1):42-44.
[4] 王为农,苏永昌,任国营.激光跟踪仪的动态特性研究[J].计量学报,2007,28(1):34-37.
[5] 刘万里,欧阳健飞,曲兴华.激光光束入射角度变化对角锥棱镜测量精度的影响[J].光学精密工程,2009,17(2):286-291.
[6] 欧阳健飞,闫勇刚.角锥棱镜精度校验[J].计量学报,2006,27(3A):197-199.
[7] 蔡薇,何小妹,王继虎,等.用激光跟踪仪对SMR反射镜性能进行检测的研究[J].计量学报,2008,29(4A):77-81.
[8] 陈曦.激光跟踪系统设计[D].天津:天津大学,2007.
[9] 赵树忠.提高激光跟踪三维坐标测量精度的研究[D].天津:天津大学,2007.
[10] 徐凤.基于激光跟踪原理的飞机形面测量技术研究[D].长春:长春理工大学,2006.
[11] 陈继华.激光跟踪仪和全站仪测量系统在上海光源_SSRF_工程中的应用研究[D].郑州:信息工程大学,2001.
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代仪器与医疗(2022年2期)2022-08-11
大学物理实验(2022年6期)2022-03-03
中学数学研究(广东)(2019年12期)2019-07-18
弹箭与制导学报(2018年3期)2018-08-28
百科探秘·航空航天(2017年12期)2018-01-31
成都信息工程大学学报(2017年6期)2017-03-16
电源技术(2016年9期)2016-02-27
测绘科学与工程(2014年6期)2014-02-27
测绘科学与工程(2014年1期)2014-02-27