
如何捕获近地小行星
——NASA小行星捕获计划
2014-08-10 07:57国家天文台朱永超
天文爱好者 2014年2期
□ 国家天文台 张 锋 朱永超
如何捕获近地小行星
——NASA小行星捕获计划
□ 国家天文台 张 锋 朱永超

小行星是太阳系形成之初的原始产物,是围绕太阳运行的岩石或金属天体,但体积和质量比行星小得多,尺寸差别也很大——大至直径可达上千千米的小行星谷神星(2006年国际天文学会将其归类为矮行星),小至几十米甚至几米的石块。
1.太阳系内的小行星分布

图1 太阳系内的主带小行星(图片来源:http://w ww.sunflowercosmos.org/ gallery/gallery_7.html)
太阳系内的小行星大多分布在火星和木星轨道之间,称为主带小行星(图1),其轨道半长径为2.1 7~3.64AU(AU,是天文学上的长度单位,1AU约等于地球到太阳的平均距离),平均值为2.77AU。截止到201 2年6月6日,已发现的主带小行星数目已达557482颗,约占已发现小行星总数目的93%。特洛伊小行星是与木星共用轨道、一起绕着太阳运行的一大群小行星。
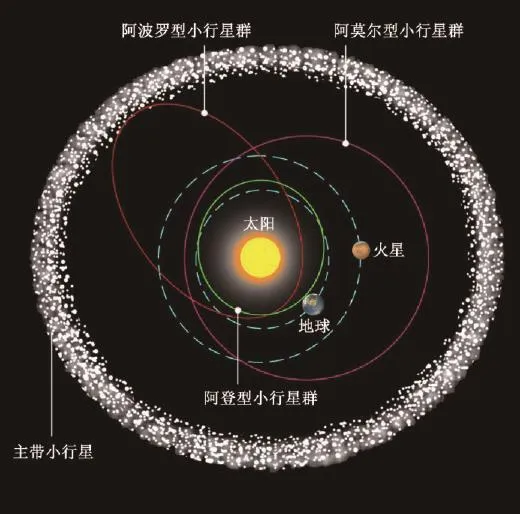
图2 近地小行星的轨道特征(图片来源:http://www.sunflowercosmos. org/gallery/gallery_7.html)
2.什么是近地小行星?
近地小行星(Ne a r-E a r t h Aster oid,NEA)指的是轨道近日点在1.3AU以内(火星轨道内)的小行星,其轨道多数与地球轨道相交。近地小行星有撞击地球的危险,成为了21世纪深空探测活动的重要目标。按照近地小行星的轨道分类,可将其分为三类(图2):(1)阿登(Aten)型小行星群,这一类小行星的平均轨道半径均小于1 AU,在地球轨道以内,远日点大于地球的近日点(0.983AU),它们经常位于地球轨道内;(2)阿莫尔(Amor)型小行星群,这些小行星的近日点均在地球轨道以外,介于1.0 17~1.3AU之间;(3)阿波罗(Apollo)型小行星群,这一类小行星的平均轨道半径位于地球轨道外,近日点位于地球轨道内,可深入到金星轨道处,甚至水星轨道以内。阿波罗型小行星的体积都很小,直径约400~8 000米,有些小行星的轨道与地球轨道相交,存在碰撞风险。
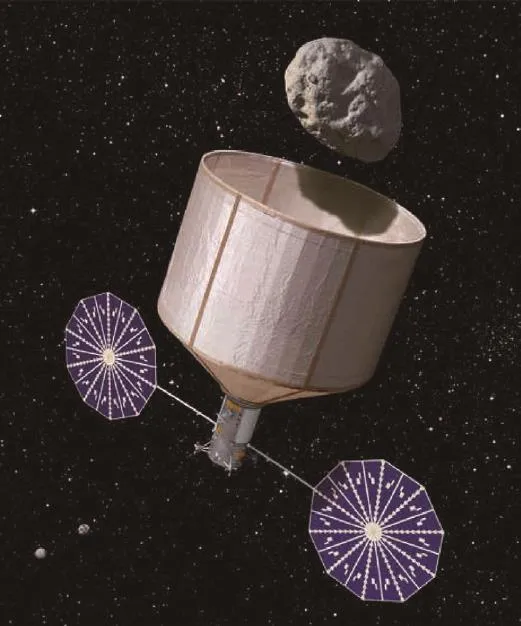
图3 (模拟图)小行星捕捉飞船正在捕捉一直径为7米、重约500吨的小行星(图片来源:Keck Institute for Space Studies)
3.NASA的小行星捕获计划
2010年,在取消了上届政府制定的以重返月球为主目标的“星座计划”的同时,奥巴马政府制定了新的太空计划,其中一项突出的任务就是在2025年前将航天员送往并登陆一颗小行星。科学家们认为,与其让宇航员到遥远的地方冒险,还不如把小行星捕捉回来再登陆,既安全又能完成任务,带入近月轨道后的小行星还可作为绕月空间站或太空基地,未来登陆火星时还可作为一个空间中转站,为2030年后载人探测火星奠定技术基础和积累相关经验。
201 3年2月,美国宇航局(NASA)向白宫提交了一份“小行星捕获”(Aster oid Capture-and-Return,ACR)计划。该计划的最终目标是于2020年之前发射一艘特制捕捉舱(图3),预计于2025年前后将一直径约7米、重约500吨的近地小行星拖回到近地环月轨道。201 3年4月,小行星捕获计划已经获得了美国政府2014年财政预算中1.05亿美元的启动资金,因此,这项总投资超过26.5亿美元的小行星捕获任务已进入了实施阶段。
4.小行星捕获计划的意义
在近地小行星中选择科学价值与工程可实现性兼备的探测目标,具有重要的科学与工程意义。小行星捕获计划的目的是深化对小行星的科学认识,研究其对地球和人类的潜在威胁和可能蕴藏的资源,并研发和测试载人登陆火星所需要的技术。
小行星是太阳系中的重要成员,保留着太阳系形成初期的原始成分以及可能与地球生命起源有关的有机物质,具有类型多样、外形不规则和引力弱等特征,是研究太阳系早期形成与演化、生命起源以及开展航天新技术(推进器、交会、远距离通信和导航等)试验的重要对象。
研究近地小行星的运行轨道及撞击地球的灾害性影响,对保护地球和人类安全都具有现实意义。2013年2月15日,一颗较小的小行星在俄罗斯车里雅宾斯克上空发生爆炸,导致大量房屋玻璃被震碎,很多建筑物遭到严重破坏,大约有1500人被飞溅的玻璃和碎片擦伤。同一天内,另一颗体积更大的小行星从距离地球大约2.77万千米(1.72万英里)的地方飞过,这比电视和通讯卫星的轨道距离地球还近。在陨石事件发生后,许多媒体将这次事件与1908年发生在俄罗斯西伯利亚地区的“通古斯大爆炸”相提并论,并称这两次小“天体”袭击事件展示了太空给地球可能带来的最严重的威胁。这又让我们联想到发生在6500万年前,最著名的由于小行星撞击地球引起的恐龙灭绝事件。不过,此次小行星捕获任务中研发的小行星表面停靠和迫使小行星转向技术可以延缓小行星撞击地球,将来一旦有小行星撞向地球,NASA能够将危险的小行星引至其他方向。
近地小行星上丰富的金属与矿产也是人类可以开发利用的重要太空资源。目前,多家企业公司已开始为在小行星上进行金属和矿产的商业开发进行各项准备工作。比如,刚刚组建不久的一家名为“行星资源”(Planetar y Resources)的采矿公司计划针对飞近地球的数以千计的小行星进行贵重金属和矿产开采,还包括采集小行星上的水资源。这样不仅可以将这些物质带回地球,还可以借助小行星就地取材,比如使用小行星上的物质建立宇宙射线防护盾以避免宇宙辐射对宇航员造成伤害,提取小行星上的水、氧气等资源为空间载人探测飞船提供生命所需补给和飞船燃料补充,甚至建立太空站点以帮助人类进行更遥远的深空探索。
超链接:
行星资源公司(Planetary Resources Inc.,旧称Arkyd Astronautics),是一家成立于2010年11月的公司,2012年改组并更名。行星资源公司的目的是要借着开发与实践小行星采矿的技术以“扩大地球的天然资源基础”。公司网址为:http:// www.planetaryresources.com/。

图4 (设想图)人类在小行星上进行资源开发(图片来源:Planetary Resources)
5.小行星捕获任务方案设计
整个小行星捕获计划(图5)主要包括三个任务段:
确定可行的目标小行星
小行星捕捉并返回
载人登陆小行星
1 小行星捕获任务初期,一重约20吨的小行星返回式太空飞船将由阿特拉斯(Atlas)V型火箭送入近地轨道(Low Eart h Orbi t,LEO),然后一功率约40 kw的太阳能电推进(Solar Electri c Propulsi on, SEP)系统将驱动这艘飞船到达目标近地小行星,这一过程大约耗时4年。
2 一旦到达近地小行星,将进入为期90天的近地小行星近距离操作段,该阶段前期将对近地小行星进行全面的近距离探测,包括其大小、自旋和表面地形地貌;后期则对其进行正式捕捉(图5)和消旋;最后,在太阳能电推进系统的助推下,小行星/飞船组合体将一起脱离小行星运行轨道,几年后,小行星/飞船组合体进入地月系统能够被月球引力捕获的轨道。
3 目标近地小行星进入环月轨道之后,飞船还将继续附着在小行星上以支持后续的“就近”载人探测任务。
小行星捕获飞船将从近地轨道以螺旋轨道飞向月球,期间借助一系列的月球引力助推(Lunar Gravity Assist),由太阳能电推进系统助推使飞船驶离地月系统。最初的地球逃逸阶段要花1.6~2.2年的时间,然后星际飞行大约2年的时间到达目标近地小行星。返回用时范围大致在2~6年,这取决于近地小行星的实际质量。考虑到小行星大小和密度的不确定性,从理论上,飞船系统能够返回的小行星质量在250吨~1 300吨之间。

图5 (模拟图)小行星深空捕获、返回到绕月轨道、载人对接和宇航员登陆并采样的操作过程(图片来源:NASA)
引力助推:
是指利用行星或其他天体的相对运动和引力改变飞行器的轨道和速度,以此来节省燃料、时间和任务计划成本。引力助推既可用于加速飞行器,也能用于降低飞行器速度。
超链接:比冲
比冲或比冲量是对一个推进系统的燃烧效率的描述。比冲的定义为:火箭发动机单位重量推进剂产生的冲量,或单位重量(重力)流量的推进剂产生的推力。比冲的单位为米/秒(m/s)或牛·秒/千克(N·s/kg),工程上习惯使用秒(s)。比冲越高代表效率越高,即用相同质量的燃料产生更多的动量。
超链接:
“隼鸟”号(图6)原预计于2007年6月返回地球,但由于怀疑探测器的燃料泄漏,延长3年后于2010年6月13日日本时间22时51分返回地球,本体于大气层烧毁,而内含样本的隔热胶囊与本体分离后在澳大利亚内陆着陆。
“隼鸟”号在宇宙中旅行了七年,穿越了约六十亿千米的路程。这是人类第一次对地球有威胁性的小行星进行物质搜集的研究,也是第一个把小行星物质带回地球的任务。
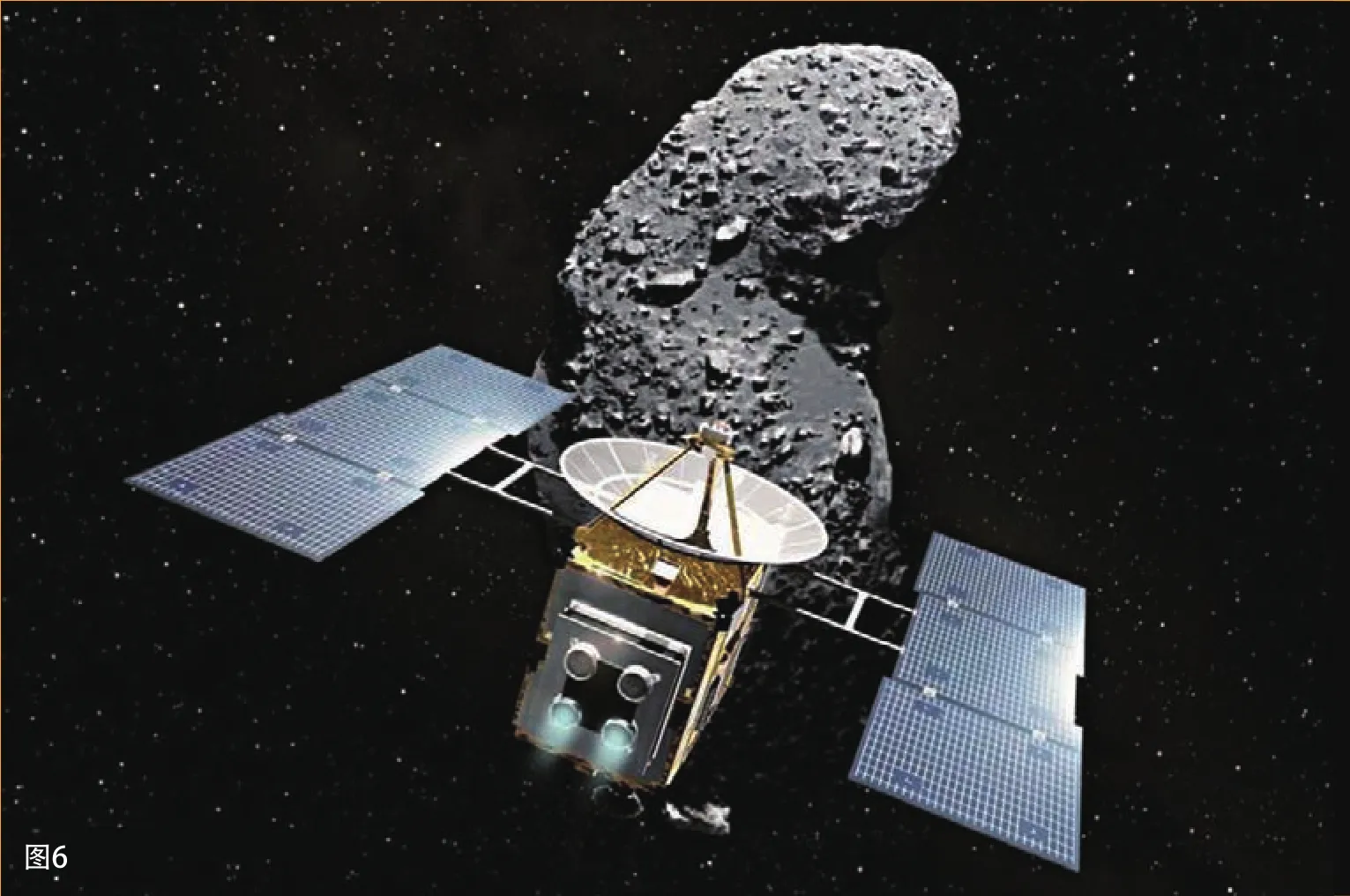
图6 “隼鸟”号是日本宇宙航空研究开发机构(The Japan Aerospace Exploration Agency, JAXA)的小行星探测计划。这项计划的主要目的是将“隼鸟”号探测器送往小行星25143(Itokawa, 又名“丝川”),采集小行星样本并将采集到的样本送回地球(图片来源:JAXA)。

图7 “黎明”号探测器,又称“曙光”号探测器,是NASA为探索小行星带的谷神星与灶神星而发射的无人太空探测器。“黎明”号探测器于2007年9月27日发射,2011年7月16日抵达灶神星,2012年9月5日正式启程前往谷神星,预计2015年抵达(图片来源:http://www.unawe.org/kids/ unawe1132/)。
6.关键技术
实施小行星捕获计划必不可少的三个技术条件包括:
小行星搜寻和探测能力的增强,能够选择到满足“小行星捕获”计划条件的近地小行星;
大功率太阳能电推进系统技术的发展,保证近地小行星在星际空间的长距离运输;
根据目前出台的近期国际深空探测计划,2020年左右能够实现载人登陆返回到近地环月轨道的近地小行星,并实施“就近”探测和开发。
基于现有的地基观测技术,已有数百个符合大小要求的小行星被发现,目前每年能够发现的直径小于10米的小行星大约有数十个,其中大约有1~3个小行星的轨道符合此次小行星捕获任务的要求。随着地面观测的不断深入,将可能会有更多的候选小行星陆续被发现。此外,目前正处于设计阶段的新一代载人航天器“猎户座”飞船以及阿波罗计划以来已经成熟的生命保障系统可以满足对捕捉回来的小行星进行载人登陆探测的要求。
改进型、大功率的新一代太阳能电推进系统的应用是执行此次小行星捕获任务的关键技术要求。太阳能电推进发动机以其轻质量、高比冲的特点已经越来越多地应用于深空特别是小行星探测任务中。比如,欧洲航天局(European Space Agency, ESA)的“智慧1”号(SMART-1,题图)、日本的“隼鸟”号(Hayabusa,图6)、“黎明”号(D AW N,图7),以及美国的“深空1”号(Deep Space 1,图8)深空探测任务就使用了太阳能电推进系统作为其行进过程中的动力来源。而此次小行星捕获任务的动力系统将采用改进型、大功率的新一代太阳能电推进系统。与传统的化学能推进器(通常是通过燃烧完成)相比,太阳能电推进使用电能+氙离子推进剂的工作模式。首先电离飞船携带推进剂氙(Xenon),然后太阳能电力形成的电场使氙离子气体加速,只要调整电场强度,就可以调整推力,其比冲远大于现有的其他推进技术,因此只需要少量的推进剂就可以达到很高的最终速度。这一技术实现了节省燃料、减轻飞船载重和携带更多仪器的目的。目前,新一代的太阳能电推进系统(图9)正在NASA的喷气推进实验室(Jet Propulsion Laboratory,JPL)不断进行疲劳测试,以检验其可靠性。

图8 “深空1”号是NASA探测小行星与彗星的一项计划,旨在验证未来行星际探测所需的十几项新技术,包括离子推进技术(即本文中的太阳能电推进技术)。1998年10月24日发射,于2001年12月18日结束了它为期3年的使命(图片来源:http:// commons.wikimedia.org/wiki/File:PIA04496.jpg)。
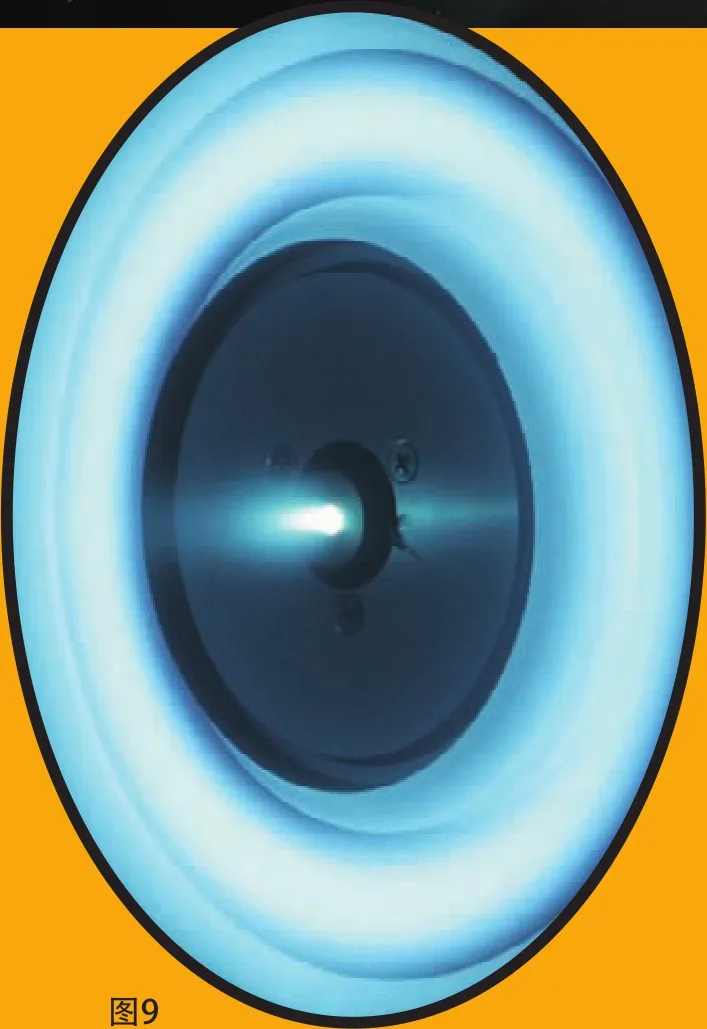
图9 处于尖端技术前沿的新一代太阳能电推进器(图片来源:NASA)。
除了使用大功率太阳能电推进系统外,将目标近地小行星拖拽到月球附近仍面临严峻的技术挑战:
目标小行星会自转,能够成功将其拖拽的前提是航天器将其捕获后,首先应让其停止转动。目前,科学家建议采用推进器提供反作用力的方式进行“消旋”(飞船与小行星自旋轴相匹配和使用动力迫其停止旋转)。
小行星捕获后,航天器的质量势必增加,使推进、导航等任务的难度增大。除精确导航外,还必须对这颗小行星精挑细选,确保它在导航失灵的情况下即便撞向地球,也不会对人类造成危害。
对目标小行星的搜索至关重要,因为在浩瀚的深空中辨认出一颗直径7米左右的小行星也并非易事。
结语
小行星捕获计划一旦成功,这将是人类首次使用外力操控并“移动”地外的一个天体,不但能为探索深空将其设为中转站,同时也将为避免“小行星撞击地球”提供实践经验。虽然此前于2003年5月9日发射的日本“隼鸟”号小行星探测器已经于2010年6月13日完成了人类首次小行星采样并返回地球的探测活动,但小行星捕获计划无论从技术难度还是从任务规模以及一旦成功所取得的成果上,都是“隼鸟”号任务无法比拟的,特别是小行星捕获计划不仅将要实现将目标小行星“运输”回来的目标,还将要实现载人登陆小行星的任务,并通过小行星捕获任务的实施提升载人探测火星所需要的技术。
目前,小行星捕获任务已进入设计阶段,NASA宣称已发现3颗符合条件的小行星,这些小行星的直径均在7~10米间,不过目前还需要进行更多试验,才能确定它们是否合适。实验将在2014年对候选小行星进行评估,如果一切进展顺利,它们都将成为捕捉目标的有效候选对象。
猜你喜欢
军事文摘(2022年24期)2023-01-05
今日农业(2022年2期)2022-11-16
小雪花·成长指南(2022年2期)2022-04-09
国际太空(2021年8期)2021-11-05
军事文摘(2020年14期)2020-12-17
好孩子画报(2016年4期)2016-11-19
太空探索(2016年12期)2016-07-18
太空探索(2016年9期)2016-07-12
太空探索(2016年1期)2016-07-12
太空探索(2016年6期)2016-07-10
