
高压大容量电动机软起动器关键技术*
2014-08-08 01:16王志新陆斌锋陈道贤
电机与控制应用 2014年10期
王志新, 王 亮, 陆斌锋, 陈道贤
(1. 上海交通大学 电气工程系,上海 200240;2.嘉兴清源电气科技有限公司,浙江 嘉兴 314031;3. 索肯和平(上海)电气有限公司,上海 201908)
0 引 言
异步电动机因为运行可靠、价格便宜、维护方便等特点,得到了广泛应用,成为电力系统的主要负荷之一。在工业生产中,所用电机的功率很大,直接起动时,起动电流通常会达到额定电流值的4~7倍[1]。特别是对6 kV以上的高压大容量电动机,如此大的起动电流会造成电机本身起动困难,同时引起电网电压急剧下降,影响其他设备的运行。为解决电动机的起动问题,电动机软起动技术受到了广泛地研究与应用。软起动一般分为降压软起动和变频软起动[2]。变频装置价格昂贵,主要用于电机调速领域,目前市场上的软起动器大多采用降压软起动[3]。本文主要对降压软起动方式进行研究。
文献[4-5]对开关变压器式软起动器的结构和起动特性进行了研究。文献[6]提出了一种基于磁通可控原理的新型连续可调电抗器,并通过样机验证了方法的可行性。文献[7]分析了大容量电动机起动对电网电压的影响,导出了TCS降补固态软起动器的工作原理。除了工作原理和结构的发展,软起动器的控制技术也取得了很大进步。文献[8]对软起动器的转矩控制方式进行了分析。文献[9-18]将模糊控制、神经网络控制等智能控制方法与电动机软起动结合,开发了若干不同控制器,并通过仿真和试验进行了验证。本文详细分析了常见软起动器的拓扑结构和工作特性,并对软起动器的控制策略进行了阐述。
1 软起动器的结构与特性
根据起动是否平滑,软起动可分为有级调节方式和无级调节方式。早期的软起动器结构简单,一般采用有级调节方式,包括星/角变换软起动、自耦变压器软起动等方式。由于分级切除串联器件时会产生二次冲击电流,电机不能频繁起动,且系统不能形成闭环控制,存在起动不平稳、控制效果差等问题。有级调节方式逐渐被液体电阻软起动、晶闸管软起动等无级调节方式取代。
1.1 传统有级调节软起动
星/角变换软起动是低压电机常用的软起动方式,只适用于正常运行时定子绕组为三角形连接的电动机。但高压电机通常额定运行于星形连接,因此星/角变换的方法基本不用于高压电机的起动[19]。
自耦变压器降压起动也是一种有级调节软起动方式。它能够有效减少起动电流,但存在滑动触点电弧烧损、碳刷磨损、局部匝间短路、切换时大电流冲击等问题,在实际应用中受到限制[20]。此外,自耦变压器还有体积大、成本高、消耗金属材料多的缺点。
在电动机定子绕组上串联电阻或电抗,也可以有效减少起动电流。但是,高压大容量电机串电阻降压起动时会产生很大的电能损耗,而在串定值电抗起动时,系统适应性较差。因此,这种降压起动方式已经很少使用。
1.2 液体电阻软起动
液体电阻软起动与传统定子串电阻起动相似。它在电机的定子回路串入液体电阻,通过改变极板的距离,相应地改变极板间液体电阻,从而实现电机的无级降压起动。
由于控制方便、液阻容量大、价格低廉、不产生高次谐波和能够实现无级调节等优点,液体电阻软起动器得到了广泛的应用。但是,对于大容量电机,每次起动后电解液会有10~30℃的温升,使软起动的重复性差[21]。同时,液体电阻箱体积较大,维护困难,需要经常添加液体以保持液位,温度较低时还要注意溶液结冰问题。
1.3 热变液阻软起动
热变液阻软起动器将热变液态电阻串入电动机的三相定子回路中。当电动机刚起动时,产生较大的定子电流,定子内部温度逐渐升高,热变液态电阻本身的负温度电阻系数特性导致其阻值逐渐降低,电动机端电压和起动转矩逐渐增加,从而实现电动机在较小的起动电流下平稳起动。因此,这种软起动器结构简单,不需要传动装置,维护方便,提高了设备的可靠性
和液体电阻软起动器相似,热变液阻软起动器因为电阻箱体积较大、发热量大,需要经常维护。另外,其对环境尤其是温度变化的耐受能力较差,难于保证不同环境温度下软起动性能的一致性,装置的调整裕度也相当有限。
1.4 晶闸管软起动
随着电力电子技术、计算机技术和现代控制理论的发展,晶闸管软起动器的性能越来越优越,不仅有效解决了电动机起动过程中电流冲击和转矩冲击的问题,还具有很强的适应性,可以根据负载变化调整起动参数,从而达到最佳的控制效果。晶闸管软起动器常采用如图1所示三相交流调压电路。它在电源和异步电动机之间接入三对反并联晶闸管调压电路,通过改变晶闸管的导通角调节输出电压,使电机的起动电流平稳上升,减少对电流的冲击。

图1 晶闸管三相交流调压电路
目前,由于受到晶闸管电压和容量限制,晶闸管软起动器主要应用在低压电机领域。在中、高压领域,一般采用晶闸管串联的方式来解决耐压问题。但是,晶闸管串联起动方式对元器件参数的一致性要求比较高,而且设备的价格比较昂贵,一旦元器件损坏,用户很难修复[22]。因此,晶闸管串联起动在高压电动机软起动方面的应用比较少,只有国外GE、ABB、SIEMENS等大公司生产这种装置。近年来,我国在高压晶闸管串联技术上也取得了飞跃式发展,国内如索肯和平电气有限公司(HPMV系列)、上海雷诺尔电气有限公司(RNM系列)等公司相继研发出高压大功率晶闸管固态软起动产品。其中,上海雷诺尔电气有限公司研发的RNMZ中高压抽出式固态软起动装置最高额定电压可达11 kV,最大容量达4 400 kW,能满足大部分高压大容量电机软起动要求。
1.5 开关变压器式软起动
开关变压器式软起动也是一种利用电力电子器件的开关特性进行调压的起动方式。工作原理图如图2所示。开关变压器的高压侧绕组串联在高压电动机定子回路中,低压侧绕组与晶闸管和控制系统相连。通过改变低压侧绕组上的电压来改变其高压侧绕组上的电压,从而达到改变高压电动机定子端电压的目的,实现电动机的软起动。
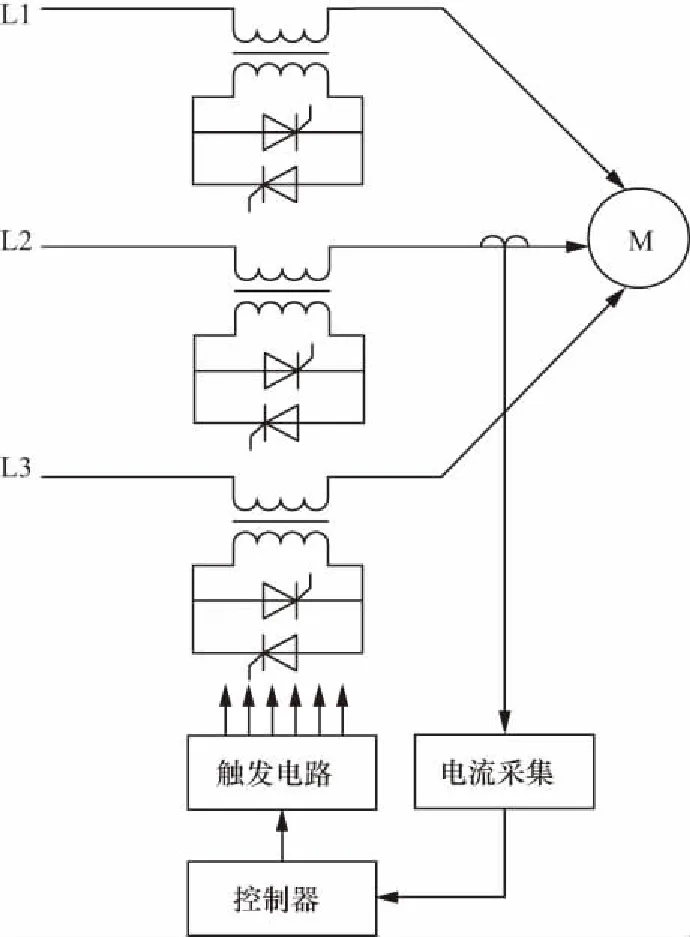
图2 开关变压器式软起动器结构图
这种起动方式具有较高的响应速度和控制精度,可连续多次起动,同时由于变压器总是工作在开关状态,所以损耗很小。虽然开关变压器降低了晶闸管电压,避免了晶闸管串联的问题,但晶闸管上承载的电流增大,其容量并没有减少。因此选择晶闸管时,其容量要与变压器相等,提高了软起动器的成本。
1.6 磁控软起动
磁控软起动是从电抗器软起动衍生出来的一种起动方式[23],也是通过在电动机定子侧串联电抗器实现电动机的软起动。不同的是,磁控起动器采用电抗值可平滑控制的饱和电抗器取代定值电抗器,在低压侧通过晶闸管控制饱和电抗器的直流励磁电流,其结构图如图3所示。其中,SCR为三相全控桥,SR为饱和电抗器。

图3 磁控软起动器结构图
由于饱和电抗器具有较大的磁惯性,磁控软起动器的响应速度比较慢。此外,磁控软起动器的调节范围有限,电机的起动电压不能控制得太低。磁控软起动器工作时,需要一定的辅助电源,会产生较大噪声。
1.7 TCS降补软起动
大容量电机在起动过程中会消耗大量无功(起动过程中功率因数可低至0.1以下),引起电网电压的波动[24]。TCS降补软起动器通过在机端并联一个无功发生器提供电机起动所需的无功功率,减小电机的起动电流,其结构图如图4所示。
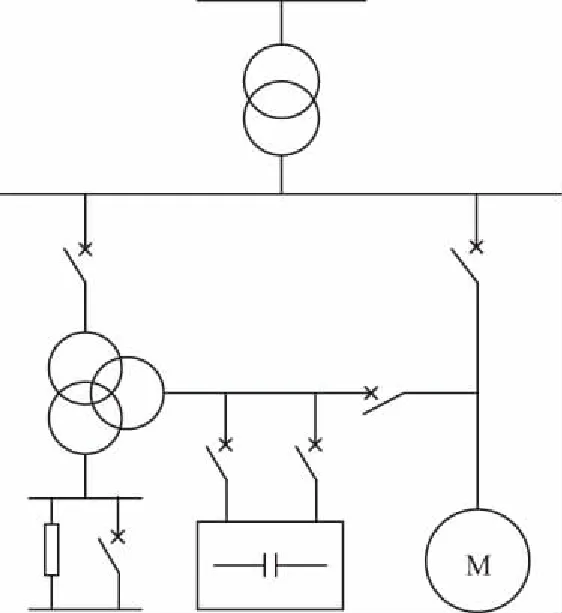
图4 TCS降补软起动器结构图
1.8 变频调压软起动
变频器主要用于电机调速领域。它能对电压和频率进行连续调节。采用变频器控制的电机具有良好的动、静态性能,能够完成软起动器的所有功能,并且具有功率因素高、起动电流小的优点。与各种降压软起动器相比,变频调压软起动具有明显的技术先进性,但价格过于昂贵,因此很少单独用于电机软起动。
高压电机降压软起动方式及特点如表1所示。

表1 高压电机降压软起动方式比较
2 软起动器的控制策略
随着软起动器的发展,其控制技术也不断进步。从开环电压斜坡控制,到电流限幅等闭环控制方式,再到闭环转矩控制。软起动器的控制性能得到了极大提升。目前,很多学者尝试把现代控制理论,如自适应控制、模糊控制、神经网络控制等,应用到软起动器上,并取得了一定成果。
2.1 电压斜坡控制
电压斜坡控制是一种最早应用的起动方式,属于开环控制。电压斜坡起动时软起动器输出电压有效值曲线如图5所示。

图5 电压斜坡软起动电压曲线
电机起动后,软起动器输出电压快速升至初始电压Uc,然后按设定的斜坡曲线逐渐上升,把电机定子电流Is限定在允许范围内,最后达到稳定值Ue。作为一种开环控制,电压斜坡控制易受负载和电源变化的影响,无法获得期望的起动效果。此外,由于没有直接限流控制,起动时仍会产生较大的电流冲击。因此,这种控制方式现在已很少应用在软起动器中。
2.2 电流限幅控制
为了得到更好的起动特性,出现了电压、电流闭环控制方式,其中电流限幅控制最具代表性。在起动过程中,软起动器不断调整输出电流,使之按图6所示的电流曲线变化。

图6 电流限幅控制软起动电流曲线
在电动机起动初期,软起动器逐渐增加输出电流,当电流到达设定值后保持恒定,然后电压逐渐升高,直到额定电压。电流限幅控制可以始终保持较小的起动电流,同时可按需要调整电流设定值,有很强的适用性,因此得到了广泛应用。采用这种控制方式时,无法确定起动压降,不能充分利用压降空间,损失了起动转矩,导致起动时间相对较长。
2.3 电流突跳控制
突跳控制起动时电机电流曲线如图7所示。电机起动时,电流在很短的时间内迅速上升到设定值,再继续起动。通过调节起动电流的设定值,可以使电动机快速起动,这种起动方式产生的冲击电流太大,一般只应用于要求快速起动的系统。
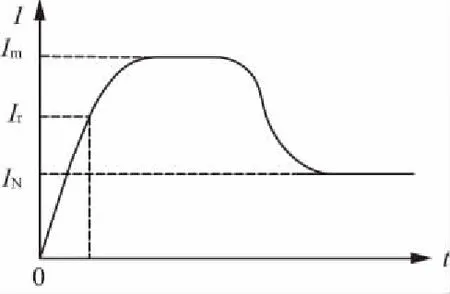
图7 电流阶跃控制软起动电流曲线
2.4 转矩控制
转矩控制起动主要用于电动机带重载的情况,电机起动时转矩曲线如图8所示。电机刚起动时,控制电机转矩线性上升,从初始转矩T0逐渐增大,直到最大转矩Tm,随着电机起动过程的结束,转矩降至额定值TN并保持不变。

图8 转矩控制软起动转矩曲线
由图8可知,转矩控制起动时起动曲线平滑,柔性好,能够很好的保护负荷,延长拖动系统的使用寿命,同时减小了对电网的冲击。但这种起动方式所用的起动时间很长,对要求起动迅速的生产系统并不适用。
2.5 转矩加突跳控制
转矩加突跳控制是转矩控制的一种改进。转矩加突跳控制起动时的转矩曲线如图9所示。起动后在一个很短的时间内对电机施加一个脉冲电压造成转矩突然增大(转矩突跳),以此克服大负载的制动转矩,然后再和转矩控制起动方式一样。

图9 转矩加突跳控制软起动转矩曲线
与转矩控制相比,这种控制方式可有效缩短起动时间,但它同时会产生一个电压脉冲,造成电网波动,干扰其他负荷的正常运行。
2.6 模糊控制
由于异步电机的起动过程是一个高阶、非线性、强耦合的时变系统,加之难以建立精确的数学模型,采用传统的PID控制无法达到理想的控制效果。模糊控制作为智能控制的一种,易于实现,并且不依赖被控对象的精确数学模型,具有很强的鲁棒性,非常适合应用于电动机软起动。图10为一种模糊控制软起动系统的结构图。
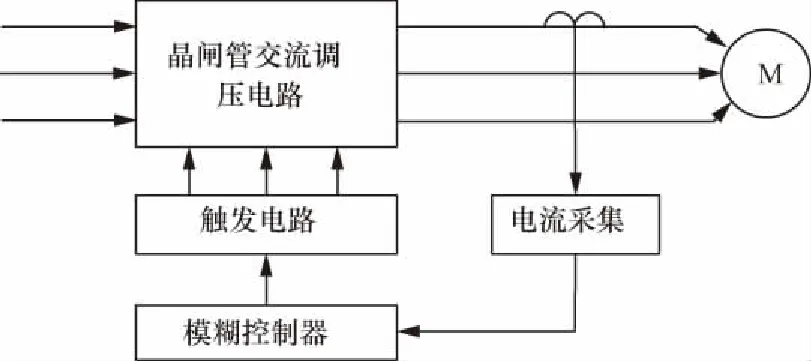
图10 模糊控制软起动系统结构图
模糊控制器首先计算出电流设定值与反馈电流的偏差e和偏差变化率de/dt,然后将其模糊化,根据规则库进行模糊推理,最后将推理结果解模糊后输出。实际应用表明,模糊控制器能够有效减小起动电流,抑制转矩冲击。
表2列举了上述软起动器常用的起动方式和工作特性。

表2 软起动器起动方式
索肯和平(上海)电气有限公司研发的HPMV-DN中高压软起动装置就可选用突跳起动、电压斜坡起动、恒流起动等多种起动方式,功率适用范围250~25 000 kW,额定电压最高可达13.8 kV,具有优异的起动性能。上海威尔克电气科技发展有限公司的WKMV高压固态软起动器适用于交流电压2.3、3.3、4.16、6、10 kV,功率200~18 500 kW,三相高压异步(同步)电动机,采用的面板及运程操作方式,按照预先设定的曲线增加电动机电压使电动机平滑加速,从而减少电动机起动时对电网拖动机械及相关的机械设备的冲击。当电机起动完成正常运转后,旁路真空接触器接通,电动机进入正常工作。软起动器继续对电动机监控并提供各种故障保护。上海日普电气科技有限公司的RPMV系列中高压软起动装置采用计算机控制技术和电力电子技术相结合,以高压大功率晶闸管为主回路的开关元件,通过改变晶闸管的导通角来控制电动机电压的平稳升降和无触点通断,实现电动机的平稳起停。以较理想的电流来起动电机,有效地减少对电网的冲击,降低设备的振动、噪声及起动机机械应力,延长电动机及相关设备的使用寿命。其中,RPR6系列电机软起动器(柜)不需要旁路接触器,摆脱外置旁路接线带来的经济成本,是软起动应用向经济性、实用性、便利性的新突破,是软起动应用走向普及的典范。此系列产品运行全过程开关无触点、无电弧,适用各种场合的电动机起停,是传统的星三角磁力起动器、自藕减压起动柜、电抗器等最理想的更新换代产品。
3 结 语
随着经济的快速发展,我国的用电量不断增长,对用电质量和电机节能也提出了越来越高的要求。目前,电动机消耗的电能占到了全国消耗总电能的60%~70%,电动机软起动技术因此得到了广泛的关注和研究。市场上流行的软起动器有很多种,软起动原理和控制策略也不尽相同,了解各种软起动器的优缺点,并从中选择最佳设备对电机和配电网的稳定运行都有极大意义。
【参考文献】
[1] 王俊,陈柏超,潘靖,等. 磁控电机软起动装置控制器的研制[J]. 电力自动化设备, 2005,25(10),62-65.
[2] 刘利,王栋. 电动机软起动器实用技术[M]. 北京:中国电力出版社,2010.
[3] 郭斌. 电机软起动器性能分析与工业应用[D]. 天津:天津大学, 2010.
[4] HUAN W, XIANGRUI S, GUANGZHE J. The study of switch transformer medium voltage asynchronous motor soft-start device[C]∥Power Electronics and Motion Control Conference (IPEMC), 2012 7th International IEEE, 2012(4): 2422-2425.
[5] GU W, CHU J, GAN S. Starting performance research of a high-power middle-voltage induction motor soft starter based on the on-off transformer[C]∥Industrial Electronics, 2006 IEEE International Symposium on IEEE, 2006(3): 2063-2068.
[6] 盛建科,陈乔夫,熊娅俐. 高压大容量的磁通可控电抗器技术[J]. 高电压技术,2006,32(4) : 91-94.
[7] 李剑军. TCS降补固态软启动装置原理及应用[J]. 江西能源,2009(1) : 91-94.
[8] NIED A, OLIVEIRA J, FARIAS CAMPOS R, et al. Soft starting of induction motor with torque control[J]. IEEE Transactions on Industry Applications 2010, 46(3): 1002-1010.
[9] 张乃标. 异步电机软起动装置的模糊控制器设计研究[J].电机与控制应用,2006 (12): 26-29.
[10] KAI L, QIANG T. Dynamic identification and control of IM soft-start using ANN[C]∥Industrial Technology, 2008 ICIT 2008 IEEE International Conference on IEEE, 2008: 1-6.
[11] GASTLIi A, AHMED M M. ANN-based soft starting of voltage-controlled-fed IM drive system[J]. IEEE Transactions on Energy Conversion 2005, 20(3): 497-503.
[12] GAN S, GU W, CHU J, et al. Soft starting high-voltage induction motors with the optimum performance[C]∥Materials for Renewable Energy & Environment (ICMREE), 2011 International Conference on IEEE, 2011(1): 655-659.
[13] JANARDHANA IYENGAR R S, SASTRY V V. Fuzzy logic based soft-start for induction motor drives[C]∥Industry Applications Conference 30th IAS Annual Meeting, IAS 95, IEEE, 1995: 121-128.
[14] LI S, LIU Z. Constant-current soft starting of induction motor based on fuzzy control[C]∥Proceedings of the 2009 International Conference on Computer Engineering and Technology,2009(2): 358.
[15] KASHIF A R, SAQIB M A. Softstarting of an induction motor using adaptive neuro fuzzy inference system[C]∥Electrical Engineering, 2007 ICEE07 International Conference on IEEE, 2007: 1-5.
[16] 高圣伟,蔡燕,陈云军. 基于神经网络的感应电机软启动控制系统仿真[J]. 天津工业大学学报,2008,27(2): 52-57.
[17] 朱正伟,蒋建明,张锁龙,等. 模糊控制理论在电动机软起动中的应用[J]. 江苏工业学院学报,2008,20(1): 32-36.
[18] 曹沛,吴雷,赵小林,等. 一种新的模糊PID控制在电机软起动中的仿真[J]. 现代电子技术,2011,34(14): 202-204.
[19] 张斌,尚刚,欧英,等. 高压交流感应电机软起动技术的发展[J]. 变流技术与电力牵引,2006 (2),75-78.
[20] 马玲,郭生江. 中压电机启动技术[J]. 钢管,2004 (3),45-47.
[21] 晏有矿. 高压电机软启动的现状与发展[J]. 机电信息, 2010 (24):18-22.
[22] 甘世红,禇建新,顾伟. 高压异步电动机软起动方法综述[J]. 电气传动,2005,35(10): 3-6.
[23] 毛芳仁. 高压电机软起动相关技术的研究[D]. 西安:西安理工大学. 2005.
[24] 唐志伟,杨华,唐铠,等. 降补固态软起动装置在大型电动风机中的应用[J]. 电工技术,2011 (12): 32-33, 51.
[25] 宁国云,袁佑新,黄声华,等. 大型电动机软起动装置性能分析与比较[J]. 电气传动,2011,41(8): 52-57.
[26] LARABEE J, PELLEGRINO B, FLICK B. Induction motor starting methods and issues[C]∥Petroleum and Chemical Industry Conference, 2005 Industry Applications Society 52nd Annual IEEE, 2005: 217-222.
[27] SHUE L, CHAO F. Design and Simulation of Three-phase AC Motor Soft-start[C]∥Intelligent System Design and Engineering Applications (ISDEA), 2013 Third International Conference on IEEE, 2013: 554-557.
[28] ZENGINOBUZ G, CADIRCI I, ERMIS M, et al. Performance optimization of induction motors during voltage-controlled soft starting[J]. IEEE Transactions on Energy Conversion,2004, 19(2): 278-288.
[29] 李国厚,高淑萍. 软起动技术及其应用[J]. 煤矿机械,2006,27(7): 185-187.
[30] 朱晓莉. 交流电动机软起动技术在工业现场中的应用[J].电机与控制应用,2007 (1): 62-64.
[31] 袁佑新,王亚兰,彭万权,等. 基于可变电抗的高压软起动器研究[J]. 电力自动化设备, 2007,27(11): 38-41.
[32] 孟彦京,谢仕宏,陈景文. 交流电机软起动技术理论的发展与分析[J]. 陕西科技大学学报,2004,22(6): 83 -87.
[33] 孙志平. 电动机软起动技术综述[J]. 吉林化工学院学报,2009,26(3): 70 -75.
[34] 陈忠华,郭凤仪,实兆元. 异步电动机软起动控制方法的研究与仿真[J]. 工矿自动化,2008 (1): 4 -8.
[35] 甘世红,禇建新,顾伟. 高压大功率异步电动机软起动性能的研究[J]. 电气传动, 2008,38(1): 11-14.
[36] 刘月新. 基于DSP异步电动机节能软启动器的开发[D]. 北京:北京交通大学,2010.
[37] 刘忠,李时育,金耀,等. 异步电动机软启动的变论域模糊自适应控制策略[J]. 计算机工程与应用, 2010,45(18): 205-208.
[38] 王毅,赵凯岐,徐殿国. 电机软起动控制系统中功率因数角的研究 [J]. 中国电机工程学报,2002,22(8): 82-87.
[39] 耿大勇. 异步电动机软起动的数字仿真[J].电机与控制应用,2008 (7): 49-52, 56.
[40] 张胜. 晶闸管控制异步电机软启动器的研究[D]. 西安:西安理工大学,2009.
猜你喜欢
现代信息科技(2022年20期)2022-11-17
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
四川冶金(2018年1期)2018-09-25
通信电源技术(2016年1期)2016-04-16
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
东北电力大学学报(2015年1期)2015-11-13
电机与控制应用(2015年3期)2015-03-01
电子设计工程(2015年12期)2015-02-27
