
气溶胶采样头在无人机上安装位置的模拟
2014-08-07 14:10张诗建朱振宇张亚飞姬亚芹南开大学环境科学与工程学院天津300071
中国环境科学 2014年9期
张 静,张诗建,朱振宇,张亚飞,姬亚芹(南开大学环境科学与工程学院,天津 300071)
气溶胶采样头在无人机上安装位置的模拟
张 静,张诗建,朱振宇,张亚飞,姬亚芹*(南开大学环境科学与工程学院,天津 300071)
利用流体力学软件CFD对固定翼无人机在海拔1000m高处以30m/s速度飞行时采样头的最佳安装位置进行了模拟.首先利用ICEM CFD前处理软件对无人机模型进行了网格划分;然后利用FLUENT软件及其中的DPM模型先后对气相(连续相)和颗粒相(离散相)分别进行了数值模拟,最后用DPM模型模拟了从速度入口方向以30m/s速度释放粒径为1,2.5,10µm的颗粒物,由颗粒物的轨迹图得到了颗粒物在机身周围的阴影区和密集区厚度.得到主要结论如下:对于本研究中的无人机,在海拔1000m高处,采集PM1,PM2.5,PM10时的气溶胶采样头的最佳安装位置为机身下部距机头距离约 42~75cm,采样头探头距机身下部壁面的距离分别应大于4,4,4.3cm,但不超过 26cm(机身下部距地面距离).
FLUENT软件;最佳安装位置;气相数值模拟;DPM颗粒相模拟
气溶胶会对气候产生影响,例如影响太阳直接辐射、散射和紫外辐射;影响大气微量成分的循环;改变能见度;以及引起城市大气热状态的变化,加剧城市热岛效应等[1].此外,大气气溶胶危害人体健康,排放的大量的SO2转化为硫酸盐,加剧酸雨的形成[2].酸雨会增加土壤酸性、损害植被的生长、污染水体,腐蚀建筑物等[3].
获得更完整的气溶胶粒子的时空分布特征,利用飞行器对大气气溶胶进行航测具有很大的优势.PMS 机载探测仪器是当今最先进的自动化粒子测量仪器.20世纪 70年代后期开始在世界各地逐步广泛采用的云微物理观测仪器于1981年始引进我国,并逐渐推广应用于一些省份的人工增雨外场试验.PMS是可以连续观测记录、实时显示的光电测量系统.它可观测大气中直径从 0.15~6400μm的气溶胶、云粒子和降水粒子等.机载 PMS 测粒系统是目前大气气溶胶的垂直分布特征研究和降水云进行直接观测分析中使用最广泛的研究手段[4-7].但是,目前有关PMS粒子探测仪器探头以及其他在飞机机身外搭载工作仪器的具体位置的理论研究尚少.
为了使得PMS等仪器在飞机上的挂载具有可靠的理论依据,本文将利用FLUENT软件和离散相模型(Discrete Phase Model, DPM模型)对无人机机身周围流场及气溶胶运动轨迹进行模拟,从理论上确定无人机上搭载采样头的具体位置.
1 软件与模型介绍
1.1 ANSYS ICEM CFD软件
ICEM CFD软件能够向用户提供业界领先的高质量网格技术:边界层网格自动加密、流场变化剧烈区域网格局部加密、网格自适应用于激波捕捉、分离流模拟、高质量的全六面体网格提高计算速度和精度、非常复杂空间的四、六面体混合网格等. ICEM CFD独特的采用映射技术的六面体网格划分功能—通过雕塑方法在拓扑空间进行网格划分,自动映射到物理空间,可在任意形状的模型中划分出六面体网格;其映射技术自动修补几何表面的裂缝或洞,从而生成光滑的贴体网格.
1.2 FLUENT及控制方程
FLUENT软件为美国FLUENT 公司所开发的商业 CFD 软件,可以模拟从不可压缩流体到高度可压缩流体的复杂流动问题,采用多种求解方法和多重网格加速收敛技术,能达到很好的收敛速度和求解精度.
基于FLUENT对无人机周围的流场进行数值模拟,就是应用FLUENT软件对控制方程在几何模型(求解域)内结合具体的边界条件进行求解并将其可视化的过程. 对模型进行求解,首先要将计算域进行离散,即对空间连续的计算域划分成许多个子区域,并确定每个子区域的节点,从而生成网格;然后,将控制方程在网格上进行离散,即将偏微分格式的控制方程转化为各个节点上的代数方程组,进而转化为对方程组的求解,FLUENT采用前处理器ICEM CFD软件对几何模型进行离散.
正常条件下,大气边界层控制方程包括连续性方程和纳维-斯托克斯(Navier-Stokes)方程[8].
连续性方程是质量守恒定律在流体力学中的具体表述形式. 它的前提是对流体采用连续介质模型,速度和密度都是空间坐标及时间的连续、可微函数. 方程式表达如下:

式中:ρ为密度,kg/m3;t为时间;u为速度,u、v和w分别为u在χ、y、z三个方向上的分量,m/s.
对于不可压缩流体,ρ为常数且不随时间变化,方程表达式如下:
纳维-斯托克斯方程是动量守恒定律描述流体时的运动方程.在χyz三维坐标系中,对于牛顿流体,其表达式如下:
式中:ρ为流体密度;P为微元所受的压力;Su、Sv和Sw为动量守恒方程的广义源项.
1.3 离散相模型—DPM模型
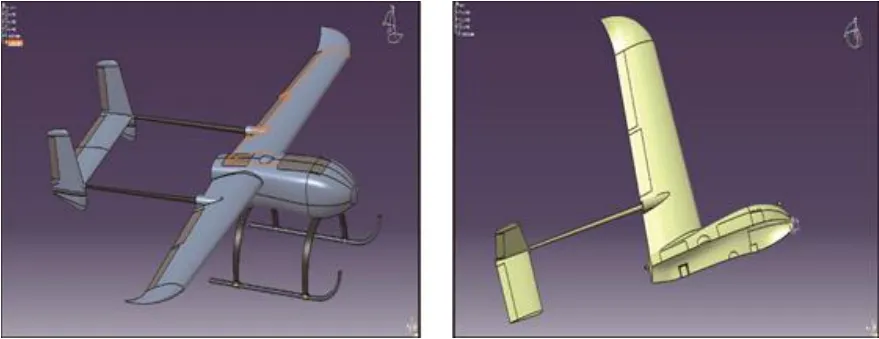
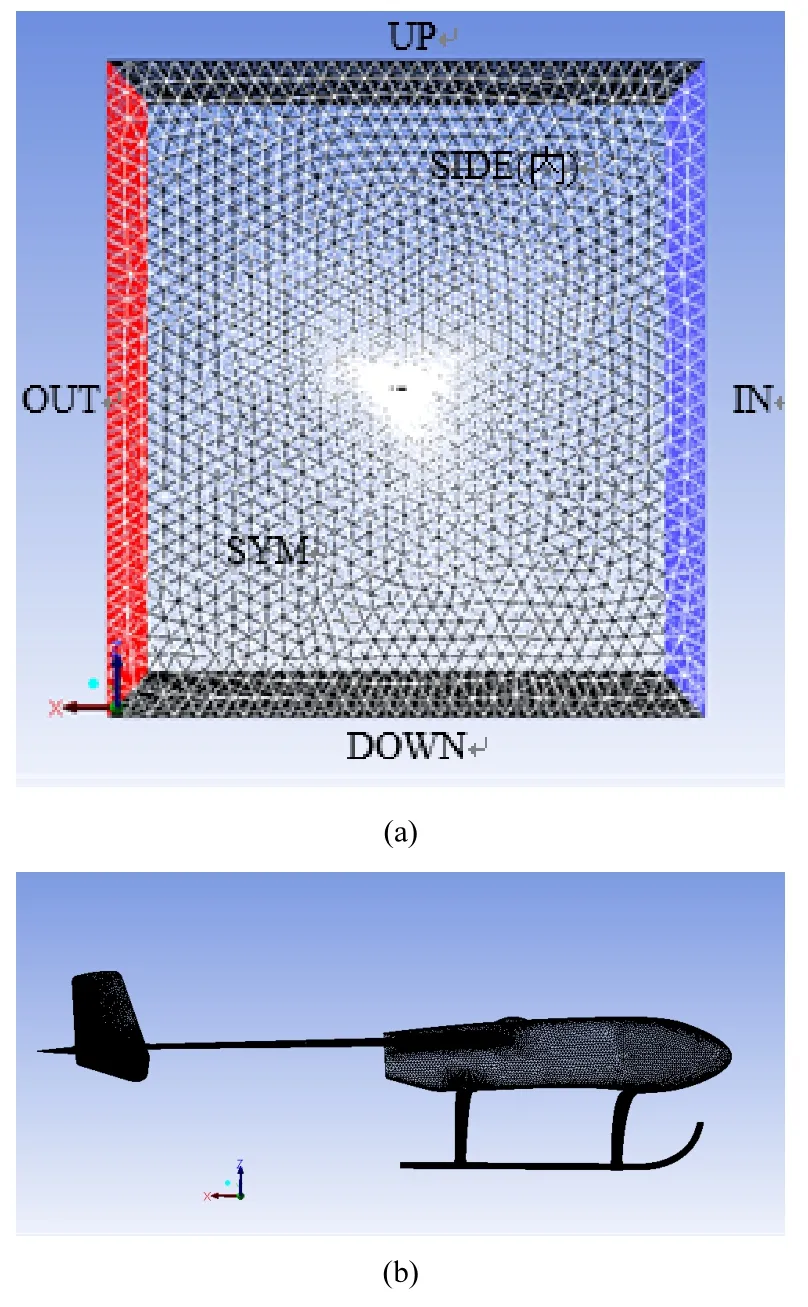
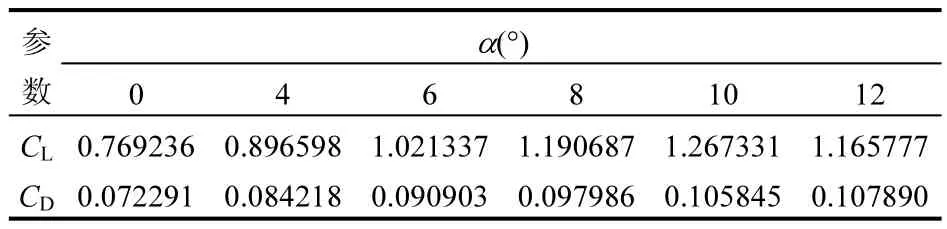
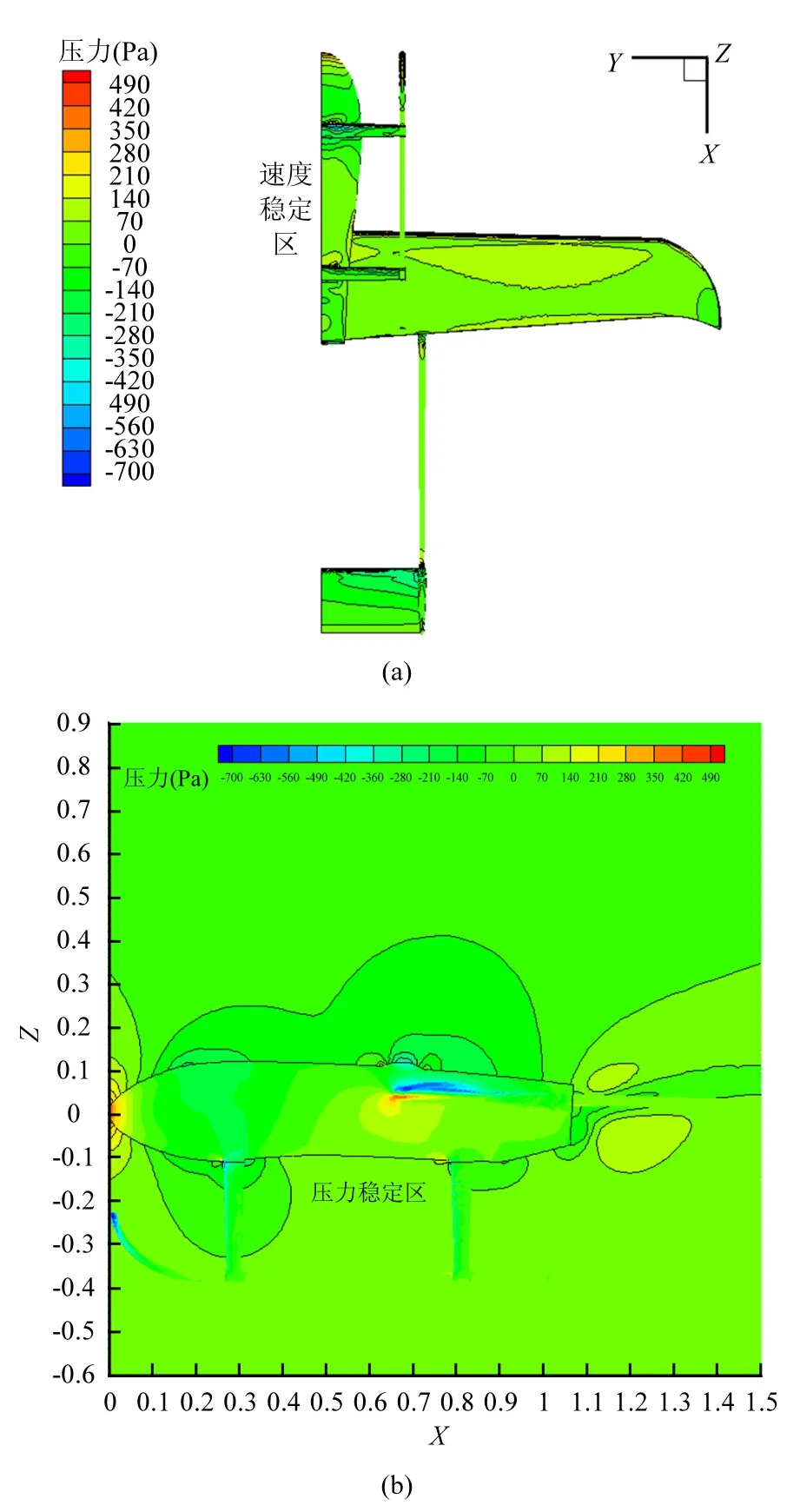
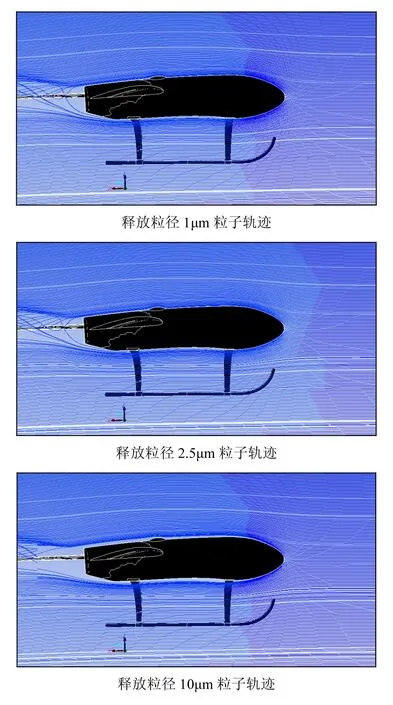
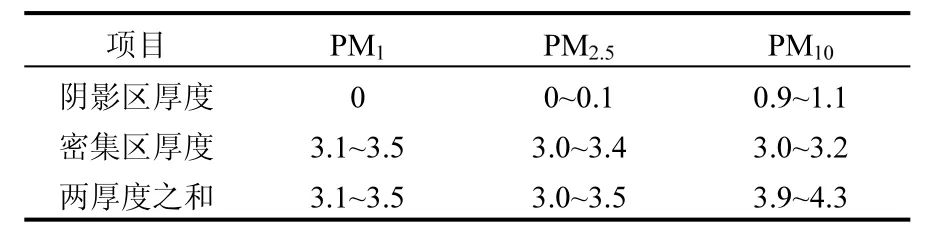
DPM模型是FLUENT软件中提供的一种非常特殊的模型,用于计算小颗粒、低浓度(体积分数 2.1 几何模型的确定与网格划分 无人机模型为后推式固定翼无人机,其主要参数如下:机长:2.3m;机高:66cm;翼展:2.9m;飞行高度:<4000m;巡航速度:80~150km/h;机翼面积0.962m2;平均气动弦长0.3317m.该无人机模型完全对称,为了减少计算量、节省计算时间,选择半模型,如图1所示. 图1 无人机全机模型和半模型Fig.1 The full-aircraft and the half-aircraft model 图2 外场边界网格(a)和机身(b)面网格Fig.2 The boundary meshes of flow field and the face meshes of fuselage 把无人机半模型导入ICEM CFD前处理软件,划分流场区域,流场选取前后约为飞机外形长度的20倍,上下左右各约为20倍翼展构建流场区域.将无人机及外场划分为7个部分,无人机机身定义为FEIJI,矩形外场各个面分别定义为IN, OUT, UP,DOWN,SIDE,SYM(对称面). 利用非结构网格划分方法对无人机及流场进行网格划分,如图 2,网格数量分别为:面网格(机身 FEIJI):212280;体网格(外场 FLUID): 7952872;边界层网格:第一层网格高度为0.015(≈弦长×10-5),增长率为1.2,共20层;总网格数量:8219943. 2.2 湍流模型的选择 计算高度选为距海平面 1000m,此高度下空气压强为 89876.3Pa,空气密度 ρ=1.11166kg/m3,动力黏度μ=1.75785×10-5Pa·s. 雷诺数计算公式为: 式中:L为特征长度,取参考弦长;ρ为流体密度;µ为流体的黏性系数;v为平均流速. 模拟无人机在本计算状态下的雷诺数为:Re=6.293×106,显然计算模型对应的流动为湍流. 马赫数(Mach,简称 M)是衡量空气压缩性最重要的参数,飞机的 Mach数是指飞机的飞行速度与当地大气(即一定高度、温度和大气密度)中的音速之比,即: 式中:V为飞机的飞行速度,m/s;a为当地大气中的音速,m/s. 飞行器速度在Mach0.3以下可认为是低速,可以不考虑空气压缩影响.本次模拟中的材料为空气,飞机飞行速度为30m/s,海拔1000m高处的音速为336.435m/s,Mach为0.089,因此本次模拟中的空气可以认为是不可压缩的. 剪切应力输运k-ω模型,简称SST k-ω模型,综合了k-ω模型在近壁区计算和k-ε模型在远场计算的优点,将k-ω模型和标准k-ε模型都乘以一个混合函数后再相加就得到此模型. SST k-ω模型和标准k-ε模型相似,但SST k-ω模型比标准 k-ε模型在广泛的流动领域中有更高的精度和可信度. k-ω模型在预测近壁区绕流和旋流方面有优势[11].因此,湍流模型选为剪切应力输运k-ω模型. 2.3 边界条件及主要参数的设置 在模拟过程中,FLUENT中的边界条件及主要参数的设置见表1. 表1 模拟中边界条件及主要参数的设置情况Table 1 Boundary conditions and main parameters in numerical simulation 3.1 FLUENT软件模拟的验证 本实验计算了不同迎角(α)下的飞机气动力参数(升力系数 CL,阻力系数 CD),从理论角度验证了数据的合理性,计算结果的部分数据见表2. 表2 不同迎角下的飞机气动力参数计算结果Table 2 The simulated result of the aerodynamic parameters under different angles of incidence 由表 2可见,随着迎角的增加,升力系数逐渐增加,当超过临界角(最大升力系数所对应的迎角)时,迎角继续增大,升力系数将急剧降低,本实验中临界迎角为 10°.对于阻力系数,在小范围内时,随着迎角的增加,阻力系数增加缓慢,迎角比较大时,迎角增加,阻力系数增加较快,当接近临界迎角时,迎角增加,阻力系数急剧增加,阻力系数永远不会为 0,也就是飞机的阻力始终存在.由以上数据说明本次模拟数据在理论上是合理的. 3.2 气相模拟结果 利用Tecplot360后处理软件对0°迎角模拟收敛的结果进行处理,得到无人机机身及周围流场的压力分布图和速度分布图,如图3,图4所示. 图3 无人机机身下部(a)及对称面上(b)的压力分布Fig.3 Pressure distribution of the bottom of UAV fuselage and symmetry plane 在选择采样头的安装位置时,所选位置的压力分布和速度分布都需要稳定,压力值应尽可能与气溶胶采集高度上的压力值相等,速度与飞机的飞行速度近似.在这种情况下才能使得采集到的气溶胶样品具有代表性. 由图3和图4可以判定满足以上条件的最佳候选位置为机身下面部分. 由图 3(a)可以看出,机身下部压力稳定区域位于距机头 40~75cm 的范围内,并且表压为0~70Pa,压力值与 1000m高处的压力值接近.由图 3(b)可以看出,流场对称面上的压力分布在距机头约 42.1~76.7cm 的范围内分布稳定,且表压为0~100Pa,压力值与1000m高处的压力值接近.图 4为流场对称面上速度云图与速度矢量图,距离机身腹部壁面大于 4.0cm部分为速度稳定区域,该区域距机头约42~77cm. 图4 机身周围对称面(SYM)上的速度分布Fig.4 Velocity distribution of the symmetry plane around the UAV fuselage 综合以上对压力分布和速度分布的分析,在海拔1000m高处,在不考虑颗粒物轨迹的情况下采样头的最佳安装位置为机身腹部距机头距离约42~75cm的范围内,采样头距离机身壁面距离应大于4cm. 前人研究也表明,飞行器采样头的最佳安装位置包括每个机翼的中心下面,机身下面,机身上部机翼后缘之前驾驶舱之后(有人机)和延伸到机头前的气流中,这些位置最小化了翼尖涡流、机头和机身的挡风板区域引起的气流畸变[12].因此,最佳安装位置在机身下面部分是合理的. 3.3 离散相数值模拟 飞行中的无人机附近的流速和颗粒物的分布与自由流不同,当气流流线被飞行中的无人机引发变形时,一般来说,比较小的粒子大部分会沿着流线运动,而比较大的粒子不再沿着确切的路径运动,这导致了“阴影区”--贴近机身的区域;偏离轨迹的粒子聚集的区域形成“密集区”--阴影区外面的区域.粒子在密集区浓度比自由流中的偏高,而阴影区的浓度为 0[13].在实际情况中,大气中的气溶胶颗粒还要受到自身重力等因素的影响,因此为了得到更加准确的采样头的安装位置,在收敛的气相流场基础上对有重力的颗粒物的运动轨迹进行了模拟. 以 0°飞行迎角进行模拟得到收敛的气相流场之后,激活DPM模型,对颗粒物的轨迹进行模拟. PM10是悬浮颗粒物中对环境和人体健康危害最大的一类,可进入鼻腔;PM2.5可进入肺部; PM1则可深达肺泡并沉积,进而进入血液循环,可能导致与心肺功能障碍有关的疾病.因此在颗粒物的研究中,主要集中在粒径为 1μm[14-17]、2.5μm[18-21]、10μm[22-25]的粒子. 为了得到具有代表性的模拟结果,在模拟中,选择 1,2.5,10μm 的粒子在飞机前端以飞机飞行速度(30m/s),按空气流动方向(即向机尾方向)模拟释放.依照惯性理论,颗粒物会受到周围流场的作用在贴近机身表面呈现不同的密度分布,可得到颗粒在纵剖面分布情况.不同粒径颗粒物释放后在对称面上的运动轨迹(图中一条线代表一个粒子的轨迹)如图5所示. 图5 不同粒径的颗粒物的运动轨迹Fig.5 The trajectories of different sizes of particulate matters 利用DPM模型模拟从速度入口处释放不同粒径的粒子,并得到这些粒子在机身周围的颗粒物密集区和阴影区厚度.机身下部颗粒物轨迹阴影区与密集区汇总如表3所示. 表3 不同粒径颗粒物阴影区与密集区厚度(cm)Table 3 The thickness of shadow zones and enhancement regions of different sizes of particulate matters(cm) 通过分析可得出,由于粒径≤10μm的粒子重力作用比较小,与壁面分离距离很小,往往会贴着机身壁面运动,形成一层比较薄的密集区域.释放颗粒物粒径为 1、2.5μm 时,阴影区的厚度很小,基本可以忽略,但随着释放颗粒物粒径的增加(10μm),颗粒物的重力也不断的增大,阴影区的厚度也有明显的增加,在释放 PM10时阴影区最大厚度能达到 1.1cm;对于密集区的厚度变化却不明显,厚度在3.0cm左右. 在选择安装采样头的位置时应避开阴影区与密集区,由表 3可以看出采集不同粒径的颗粒物时,采样头的探头与机身下部壁面的距离不同,采集PM1时,采样头探头与机身下部壁面的距离最小为 3.5cm;采集 PM2.5时,采样头探头与机身下部壁面的距离最小为3.5cm;采集PM10时,探头与机身壁面的距离应大于 4.3cm,这样才能使得采集区处于颗粒物运动稳定区.由于着陆时机身距地面约为 26cm,因此采样头安装位置在机身下部不得超过26cm. 以上数值模拟结果在理论上得到了采样头的安装位置,该模拟结果将在风洞实验进行验证,并得到更加具体和合适的采样头安装位置. 根据对气相模拟结果的分析,在海拔 1000m高处,满足气溶胶采样头探头安装条件的位置为机身下部距机头约42~75cm的范围内,距离机身下部壁面大于4cm.而根据颗粒相的模拟结果,采样头探头距离机身下部壁面的距离在采集PM1、PM2.5、PM10时分别应大于3.5,3.5,4.3cm. 综合以上两种模拟结果,可以得出在海拔1000m高处,采集PM1、PM2.5、PM10时的气溶胶采样头的最佳安装位置为机身腹部距机头距离约 42~75cm,采样头探头距机身下部壁面的距离分别应大于4,4,4.3cm,但不超过26cm. [1]王明星.气溶胶与气候 [J]. 气候与环境研究, 2000,5(1):1-5. [2]任丽新,游荣高,吕位秀,等.城市大气气溶胶的物理化学特性及其对人体健康的影响 [J]. 气候与环境研究, 1999,4(1):67-73. [3]闫百瑞,王永平.酸雨的危害及其控制浅析 [J]. 北方环境,2011,23(3):74-76. [4]孙 霞,银 燕,孙玉稳,等.石家庄地区春季晴、霾天气溶胶观测研究 [J]. 中国环境科学, 2011,31(5):705-713. [5]范 烨,郭学良,付丹红,等.北京及周边地区2004年8,9月间大气气溶胶分布特征观测分析 [J]. 气候与环境研究, 2007,12(1): 49-62. [6]Zhang Q, Ma X, Tie X, et al. Vertical distributions of aerosols under different weather conditions: Analysis of in-situ aircraft measurements in Beijing, China [J]. Atmospheric Environment, 2009,43(34):5526-5535. [7]黄海燕,郑国光.北京地区春季气溶胶分布特征的个例分析 [J].气象, 2009,35(7):3-9. [8]张师帅.计算流体动力学及其应用-CFD软件的原理与应用[M]. 武汉:华中科技大学出版社, 2011:5-8. [9]蒋海华.旋风分离器大涡数值模拟及分离性能研究 [D]. 长沙:中南大学, 2009. [10]薛 元,姚 强,张金成.水平直管道中气体-颗粒两相流实验研究 [J]. 热能动力工程, 2003,18(103):39-42. [11]李鹏飞,徐敏义,王飞飞.精通 CFD工程仿真与案例实战 [M].北京:人民邮电出版社, 2011:124-126. [12]Kulkarni P, Baron P A, Willeke K. Aerosol measurement: principles, techniques, and applications [M]. John Wiley and Sons, 2011,606-608. [13]Twohy C, Rogers D. Airflow and water-drop trajectories at instrument sampling points around the Beechcraft King Air and Lockheed Electra [J]. Journal of Atmospheric and Oceanic Technology, 1993,10:566-579. [14]Crilley L R, Ayoko G A, Morawska L. Analysis of organic aerosols collected on filters by Aerosol Mass Spectrometry for source identification [J]. Analytica Chimica Acta, 2013,803:91-96. [15]薛 莲,孙 杰,林 云,等.深圳冬季霾日的大气污染特征 [J].环境科学研究, 2011,24(5):505-511. [16]黄元龙,杨 新.大气细颗粒物对大气能见度的影响 [J]. 科学通报, 2013,58(13):1165-1170. [17]谢 敏,岳玎利,区宇波,等.珠三角夏秋季节大气颗粒物与碳黑气溶胶污染特征的研究 [J]. 环境科学与管理, 2013,38(6):162-166. [18]Hyo C. Trapping effect of a calm zone by Lee side-internal gravity waves and cyclonic winds on sudden high concentrations of particulate matters combined with the yellow dusts from Gobi Desert in the Korean Eastern Coast [J]. Disaster Advances, 2013,6(11):101-111. [19]姚振坤,冯 满,吕森林,等.上海城区和临安本底站PM2.5的物化特征及来源解析 [J]. 中国环境科学, 2010,30(3):289-295. [20]余学春,贺克斌,马永亮,等.北京市PM2.5水溶性有机物污染特征[J]. 中国环境科学, 2004,24(1):54-58. [21]戴 伟,高佳琪,曹 罡,等.深圳市郊区大气中PM2.5的特征分析[J]. 环境科学, 2012,33(6):1952-1957. [22]Giorio C, Tapparo A, Scapellato M L, et al. Field comparison of a personal cascade impactor sampler, an optical particle counter and CEN-EU standard methods for PM10, PM2.5and PM1measurement in urban environment [J]. Journal of Aerosol Science, 2013,65:111-120. [23]周家斌,王铁冠,黄云碧,等.北京部分地区大气PM10中多环芳烃的季节性变化 [J]. 中国环境科学, 2005,25(1):116-120. [24]钱冉冉,闫景明,吴水平,等.厦门市冬春季灰霾期间大气PM10中多环芳烃的污染特征及来源分析 [J]. 环境科学, 2012,33(9): 2939-2945. [25]吕森林,邵龙义,吴明红,等.北京城区可吸入颗粒物(PM10)的矿物学研究 [J]. 中国环境科学, 2005,25(2):129-132. Numerical simulation of the optimal placement of aerosol sampling-head on an unmanned aerial vehicle ZHANG Jing, ZHANG Shi-jian, ZHU Zhen-yu, ZHANG Ya-fei, JI Ya-qin*(College of Environmental Science and Engineering, Nankai University, Tianjin 300071, China). China Environmental Science, 2014,34(9):2192~2198 CFD software was applied to simulate the optimal placement of fixed-wing UAV which flew at the altitude of 1km with a speed of 30m/s. Mesh generation was carried out for the UAV model via the pre-processing software ICEM CFD. Furthermore, the FLUENT software and the DPM model in it were used for simulating the gas phase (continuous phase) and particle phase (dispersed phase). The DPM model simulated the trajectories of particulate matters of different sizes (1,2.5,10µm) which were released from the direction of the velocity inlet at the speed of 30m/s. The simulation results provided the thickness of shadow zones and enhancement regions. The main results indicated that: for this kind of unmanned aerial vehicle (UAV) with the altitude height of 1km, the aerosol sampling-head, which was for the purposes of gathering PM1, PM2.5and PM10should be installed on the bottom of the UAV and be about 42.1cm to 75cm away from the nose. The probe of sampling head for gathering PM1, PM2.5and PM10should be 4, 4, 4.3cm away from the bottom, respectively, but no more than 26cm. FLUENT software;optimal placement;numerical simulation of gas phase;DPM model X51 A 1000-6923(2014)09-2192-07 张 静(1988-),女,山东乐陵人,南开大学博士研究生,主要从事大气颗粒物污染防治理论与技术研究. 2014-05-07 国家重大科学仪器设备开发专项(2011YQ060111) * 责任作者, 副教授, jiyaqin@nankai.edu.cn2 模拟方案



3 模拟的验证与结果讨论

4 结论
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
成都信息工程大学学报(2022年3期)2022-07-21
北京航空航天大学学报(2021年6期)2021-07-20
装备环境工程(2019年6期)2019-07-16
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2016年6期)2016-11-16
浙江大学学报(工学版)(2016年11期)2016-06-05
中国光学(2015年5期)2015-12-09
国外科技新书评介(2014年4期)2014-12-17
科技传播(2014年4期)2014-12-02
