多USV协同系统研究现状与发展概述
2014-07-31 20:19:27马天宇杨松林王涛涛
舰船科学技术 2014年6期
马天宇,杨松林,王涛涛,辛 磊,陈 燚
(江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003)
多USV协同系统研究现状与发展概述
马天宇,杨松林,王涛涛,辛 磊,陈 燚
(江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003)
无人水面艇(Unmanned Surface Vehicle,USV)具有较高的智能化程度,较好的隐身性能,较强的机动能力以及较低的造价,被认为是一种作战用途广泛的新概念武器。在无人驾驶运载工具中,USV发展相对较晚,但已逐渐成为一个研究热点课题。文中简述目前国内外USV的研究情况;重点介绍多USV协同系统的现状;阐述高性能艇型、控制体系、通信技术、避碰、任务规划与决策5项关键技术;提出未来发展趋势;展望多USV协同系统在海上补给、水上安全保护、完善无人作战系统、水文气象信息采集和水面搜救方面的应用前景。
无人水面艇;多USV;协同系统;无人作战系统;高性能艇型
0 引 言
无人水面艇也称水面无人艇及水面机器人,是一种无人操作的水面舰艇,主要用于执行危险以及不适于有人船只执行的任务。二战时期,无人水面艇曾被作为火炮和靶船。直到20世纪90年代,关于USV项目的研究才开始大量出现。在众多无人驾驶运载工具中,无人机(UAV)的发展应用较为成熟,无人地面车辆(UGA)和无人水下艇(UUV)次之,而无人水面艇(USV)的发展相对较晚。由于具有较高的智能化程度,较好的隐身性能,较强的机动能力以及较低的造价,USV被认为是一种作战用途广泛的新概念武器[1]。2001年,美国海军提出利用USV,UUV和UAV共同构成其濒海战斗舰(LCS)的无人作战体系,完成情报收集、反潜、反水雷、侦察与探测、精确打击等作战任务[2]。然而,面对动态复杂的环境、不可预知的潜在危险和多样化的任务使命,单一USV受限于自身搭载的有限的载荷与系统,显得势单力薄。与此同时,由多艘USV联合起来构成的协同系统,具有更强的鲁棒性、通信能力、机动性、灵活性、更高的作业效率和更广的作业范围。考虑到现代战争对于多兵种,多武器,多方位的综合协同作战需要[3],多USV协同系统可完善无人作战系统的发展使用。
1 无人水面艇研究现状
无人水面艇通过搭载不同传感器或设备模块,可以完成情报搜集、水上监视、无人侦察、反水雷、反潜、辅助通信和导航、干扰敌军通信网络、诱杀敌方潜艇、远程火力攻击等不同任务。目前世界上许多国家都开展了对无人水面艇技术的研究,其中美国和以色列在USV的研究和应用方面走在了世界前列[4-5]。
1.1 国外现状
1)美国
2008年,通用动力公司机器人系统部为美国海军先后交付了2艘“港湾”级反潜战水面无人艇(ASW USV),主要应用于近海环境、执行海上防御、通道保护、港口侦察以及保护海军水面战斗群等反潜任务。美国达信系统公司也于同年制造了通用无人水面舰艇(CUSV),用于执行情报、监视和侦察、拖曳作业、反水雷、反潜、反水面战、通信中继发射和回收无人机等任务。2011年9月,美国海军新型的三体无人快速侦察艇“X-2”号在圣迭戈湾下水,主要用于完成海岸监视、禁毒、拦截、巡逻等任务。美国国防部承包商于2012年展示了新型无人水面舰艇“食人鱼”,该艇具备扫雷、探测和攻击水下敌方潜艇和水面舰艇功能。
2)以色列与其他国家
以色列的“保护者”USV,主要用于本土防御和反恐作战,并可完成部队保护、监视侦察等任务。埃尔比特系统公司于2006年公布了自主无人水面艇“银色马林鱼”,它适合执行多种使命,例如情报、监视和侦察、兵力保护/反恐、反舰和反水雷、搜索与救援,港口和水道巡逻以及电子战。航空防务系统公司于2006年独立开发的无人水面艇“海星”,主要用于执行一系列海军或海上任务,包括港口设施保护、海岸巡逻、舰船和石油钻机保护、侦察任务、目标标示、干扰和诱饵、兵力保护和延伸光电磁场等。
此外,其他国家也进行了无人艇开发和研制[6-7],如葡萄牙于2006年研制的“德尔芬”双体无人水面艇;德国于2008年研制的“水猫M8”快速攻击艇;瑞典于2009年研制的“SAM 3”扫雷水面无人艇;新加坡于2010年研制的“金星”无人艇;法国ECA公司于2010年研制的“黑星”无人水面艇;马来西亚于2012年研发的一种用于海上巡逻和环境监测的无人艇;英国自主水面航行器(ASV)公司于2013年研发的“C-Enduro”系列长航时无人水面艇等。
1.2 国内现状
2006年,在第六届珠海航展上亮相的“闪电”XG-3高速探测无人水面艇[8],可在较恶劣条件下进行特定区域的探测、侦察甚至是小目标攻击。2008年,曾为北京奥运会青岛奥帆赛提供气象保障服务的无人驾驶海上探测船“天象一号”[4],是国内第1艘用于工程实际的无人水面艇,也是第1艘用无人水面艇进行气象探测的系统,可实现智能驾驶、雷达搜索、卫星应用、图像处理与传输等功能。2010年,台湾海洋科技研究中心研制出一型无人水面艇“郑和101”号[9](见图1),其主要功能是面向台湾西部和东南海况环境复杂多变的近海水域,进行水文水质气象数据的调查、监测、收集和分析等工作。2013年,我国自行研制开发的首艘无人测量艇正式诞生[10](见图2),它实现了遥控与自主导航航行、路径规划、路径跟踪、水面及水下障碍的自主避障避碰、远距离自主航行等功能;实现了单波束、多波束声呐探测,前视多波束声呐、侧扫声呐探测,多普勒流速流向测量等海洋多要素综合测量功能。

图1 “郑和101”号无人水面艇Fig.1 “ZhengHe101”USV

图2 我国首艘无人测量艇Fig.2 The first USV for surey of China
此外,哈尔滨工程大学、上海海事大学和江苏科技大学等[11-13]国内高校也研制出无人水面艇模型,并进入了实验研究阶段。
2 多USV协同系统研究现状
美国麻省理工学院的Joseph Curcio和Toby Schneiderr等[14-16]针对自主研发的4艘低成本水面无人艇SCOUT(Surface Craft for Oceanographic and Undersea Testing),对基于采样平台,自主性软件(MOOS-IvP软件架构)及海空通信基础设施(EVDO网络、无线网络、水声通信和互联网)系统等方面进行了较多研究,通过试验测试表明这种无人艇可完成港口监控等协同任务。以欧盟项目“不确定环境下协同异构无人系统的协调与控制”(GREX,2006-2009)为背景,葡萄牙的高级技术所-系统与机器人研究所(IST-ISR)对已知任务场景下的自主海洋船协同运动控制的一般问题开展了大量试验研究[17-19],包括动态环境中的避碰,时变通信拓扑和损失架构,支持软件/硬件的多海洋船协同运动控制算法的效能等问题。Joshua Redding等[20]提出一种无人水面艇的协同任务规划、自主和控制技术(CoMPACT),开发了一种基于快速扩展随机树(RRT)算法的路径规划算法的仿真图形用户界面。可使模块化设计的多异构水面无人艇实现协同反潜、反水雷和区域搜索等任务。Ivind Aleksander G. Loe[21]对基于国际海上避碰规则COLREGS的水面无人艇避碰系统进行了研究,通过仿真和全尺寸试验,验证了该避碰系统可以寻求到接近最优的路径,具有良好的鲁棒性。Massimo Caccia和Marco Bibuli等[22-24]针对搭载有自主软件、有效载荷模块,多波束声呐、云台单元和控制软件的Charlie USV,对无人水面艇的导航、制导、控制,特别是路径跟踪问题做了海试研究,并验证了其可靠性。基于人机界面和地面局域网络等控制系统,该型无人水面艇协同作业可完成反水雷和港口保护等海上安全使命。
J.Almeida等[25]讨论了在离散时间内保持定期通信联网的自主水面船的协同路径跟踪问题。对于受动态通信网络拓扑结构约束的协作船只,基于李雅普诺夫技术、图论和网络控制的分散式控制系统,由相互关联的路径跟踪和协同策略输入输出状态反馈表组成。英国贝尔法斯特女王大学[26-28]基于国际海上避碰规则COLREGS,对无人艇的导航、制导、控制和路径规划等方面进行了较为深入的研究,其中针对英国Springer双体无人水面艇,设计了包含直线导航点和人工侧滑方案的障碍物检测与避碰策略,提出一种无功路径规划算法,用于反馈给无人艇自动舵,并通过仿真验证了无人艇面对静态或动态障碍物均生成了可行的轨迹。CheeKuang Tam等[29]提出一种用于计算符合国际海上避碰规则的导航路径的路径规划算法。通过一组实验数据模拟了一系列海上交通场景,从算法的不同方面讨论了从不同角度输出的一致性,导航路径的实用性,计算性能等问题。
从以上文献可以看出,国外学者对于无人水面艇协同路径规划、协同路径跟踪和协同作业中的避碰进行了较多的仿真与试验研究。
国内学者目前主要侧重于对USV艇型的设计,智能控制方法,操纵性,自主导航等方面[30-35]进行研究。对于多USV协同系统的研究较少。其中,徐博等[36]提出基于微惯性网络的主从式协同导航定位方法,对基于多领航者的协同导航定位和基于单领航者的协同导航定位2种协同导航定位方法进行了理论分析。王卓等[37]提出一种基于多智能体技术的水面无人艇协同仿真系统设计方案,通过开展航线跟踪和自主航行仿真实验,验证了协同仿真框架及开发方法的可行性和正确性。
3 多USV协同系统的关键技术
3.1 高性能艇型
一个无人化的多USV协同编队,其智能化程度将直接由每个USV的性能决定。毋庸置疑,拥有航速高、耐波性优良、运载能力较大、经济性好等[38]诸多优点的高性能艇型是组成多USV协同编队的首选。从近年来无人水面艇研究进展可以看出,滑行艇、穿浪艇、多体船等艇型是各国的研究热点。高性能艇将极大地提升多USV协同编队的整体性能。
3.2 控制体系
对于一个多USV协同系统,其核心是控制体系。参考多无人机系统,多个无人水面艇组成的协同控制体系也可分为集中式,分布式和混合式3种。集中式控制是将1艘综合性能较高的USV作为母艇,经过分析处理后把信息传递给其他各子艇,进行任务部署;分布式控制是每艘USV都具有独立接收命令与分析的能力,可以按各自的意愿决定动作。前者虽然协调效率较高,但主控USV产生故障将直接导致整个系统的瘫痪,因而这种控制方式的自主性和鲁棒性都比较差;后者由于各USV之间可以进行相互通信,所以有较好的容错能力与可扩展性,但多艘USV的协调效率较低,容易产生局部冲突,全局性较差。因此,将以上2种控制方式结合起来就形成了最理想的混合式控制体系,它兼顾了集中式与分布式的优点,敏捷性、灵活性、可靠性、持续性和鲁棒性等较好,能够很好地满足多USV协同作业的需要。
3.3 通信技术
无线通信可以使各无人水面艇相互了解意图、目标、动作以及当前的航态等信息,从而进行协商,完成数据的传输,并执行相应的命令,协作完成任务。按通信方式可分为显式通信和隐式通信[39]。隐式通信是指USV通过外界环境与自身传感器获取信息实现相互之间的协作,各USV之间没有直接进行信息交互。隐式通信不存在数据的显式交换,多USV之间不能使用高级协作策略,降低了完成复杂任务的能力;显式通信是多USV系统通过特定的介质,完成各USV之间信息的转移和交换。显式通信虽然可以完成隐式通信无法完成的高级协作策略,但却存在网络延时和局部通信冲突等通信质量问题。USV需要将传感器记录的视频信息、位置信息、姿态信息,通过无线链路信道,实现信息的传输与共享。然而,有限的通信范围将直接对通信能力产生影响,这就需要多USV间的信息传输具有多种协议、多条链路、多种方式、高带宽、实时性以及较强的抗干扰能力。考虑到USV体积较小以及各艇载传感器分布密度较大,多USV如何对感知的环境进行融合是协同通信的难点。
3.4 避碰
多USV协同编队至少由3艘无人水面艇组成。在执行任务时,任何2艘无人水面艇之间都要保持最小的安全距离,防止产生碰撞,对无人水面艇协同编队的整体性造成破坏。这样必须考虑的一个问题就是避碰[40]。避碰不仅是指避免USV之间或USV与其他船只产生碰撞,而且也包括避免USV和障碍物的碰撞,它又分为基于传感器信息的静态避碰与基于未知环境的动态避碰。静态避碰,要求在无人水面艇导航系统中增设激光测距仪、雷达、多波束前视声呐和侧视声呐等设备,从而对水面或水下的障碍物进行监测,反馈给USV控制中心。动态避碰是指在未知的环境中往往会存在多个甚至是可移动的障碍物,USV在避开一个障碍物以后,必须要迅速做出反应并重新规划航迹避开下一个障碍物。由于实时性和连续性,目前USV的动态避碰存在一定难度。
3.5 任务规划与决策
协同任务规划是实现多USV协同控制的关键技术,它可以划分为任务分配和路径规划。协同任务分配,是综合考虑各无人水面艇自身的性能、任务的重要性,将不同的子任务分配给合适的USV,使得多USV协同系统完成全部任务时收益最大。协同任务分配处于智能决策的上层,将决定下层协同路径规划的策略。任务分配的难点在于如何动态地组织和分配任务给各USV,以及面对新的任务产生或环境改变时,如何重新分配任务,合理地调整路径规划。协同路径规划,是指在考虑在一定条件的约束下,多艘USV可以最短且最安全的路径完成一个最优的任务目标。类比于多无人机和多无人水下艇,常见的路径规划算法有Voronoi图形法、人工势场法、快速扩展随机树算法和解决旅行商问题的蚁群、粒子群、鱼群等群算法。
4 发展趋势与展望
4.1 发展趋势
按照美国海军“无人艇主计划”[41]提出的无人水面艇“高回报”任务场景设想,越来越多具备不同功能的异构无人水面艇将会诞生,这将不断推动无人水面艇艇型的演化。从高性能艇型到复合杂交艇型[42],甚至到水陆、水空两栖艇型[43],新型的USV将层出不穷。多USV协同编队呈现出多样性,可以和多UAV、多UUV、多UGA等其他智能无人运载工具进行合作(见图3),形成新的监视和通信网络,具备强大的环境感知能力和多维空间的信息获取能力。无人水面艇作为通信的中继端,将连接空中和水下2种介质,具备更强的信息采集能力与分析处理能力。因此,无线通信技术不仅是多USV协同系统集成的技术保障,也是多无人运载工具协作的关键。将多USV间的显式通信和隐式通信结合起来,是未来一种发展趋势。此外,随着多USV面对任务使命难度不断增大,如何实现动态地协同任务分配与再分配,最大限度地发挥每个USV的特点,有的放矢,避免协同编队内部产生冲突与干扰,是未来多USV协同系统的研究热点。

图3 未来巴伦支海多种无人运载工具组成的监控体系效果图[44]Fig.3 The future effect picture of surveillance system of the Barents Sea composed of multiple unmanned vehicles[44]
4.2 应用展望
1)海上补给。当海面上的军舰急需燃油、润滑油、武备等方面的补给,USV可以快速地携带这些具有危险性的物品完成任务。同样对于客货船甚至是海洋平台,USV也可以对食品、行李、备品等方面的补给。多USV协同作业弥补了单一无人水面艇载重量小的缺点,可以高效地实现海上补给。
2)水上安全保护。无人水面艇因其自身的无人化,对水上安全的保护具有一定优势。多USV在近海岸进行协同巡逻,对潜在的水雷或其他威胁进行排查,对可疑目标进行拦截,将巡逻信息第一时间反馈给港口基站,对港口和航道形成有效的保护。此外,对于停泊的有人舰艇,在其周围工作的多USV协同编队也可以实施有力的保护。
3)完善无人作战系统。从美国国防部提出的无人作战系统发展路线图[45]可以看出,异构的多USV协同编队,连接了海、陆、空无人协同作战系统(见图4),形成了多维立体化联合武装力量,未来在信息化战争和反恐战争中的作用不容小觑。虽然多USV协同系统起步缓慢,但却发展迅速,在未来10-20年多USV协同系统都将作为无人系统的重点发展对象。各国加大力度研究无人水面艇相关技术,也是旨在增强军事实力和无人化智能化作战程度。
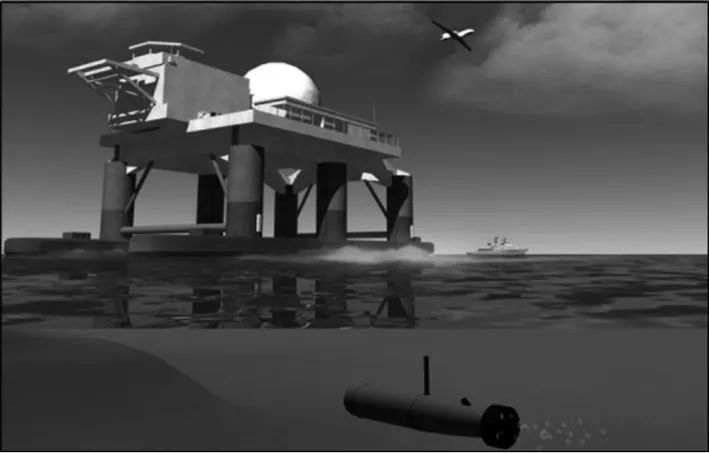

图4 无人协同作战系统效果图[46]Fig.4 The effect picture of unmanned cooperating combat system[46]
4)水文气象信息采集。无人水面艇既可以完成水面风速、风向,流速、流向,水温、水质等水文监测,也能对地震、海啸等随时可能发生的自然灾害进行探测。显然,这些时变信息的采集,多USV协同编队相比于人为监测具有实时性、高效性、持续性和安全性等优点。
5)水面搜救。美丽的沙滩和深蓝的海水在吸引大量游客观光的同时,存在着溺水危险,而环境的嘈杂往往使得意外溺水的游客不一定得到及时的救助,很可能就此丧失生命。在浅海海域协同作业的无人水面艇可以很好地解决这个问题,它们可以在第一时间发现溺水者实施载人救助,并根据有效载荷的变化向基站发起援助信息。
5 结 语
多USV协同系统在民用和军用领域均展现出广阔的发展前景,特别是军事意义日趋凸显。面对21世纪复杂多变的海洋环境,各国已发现USV在海上的潜力,必将加快其研发进程,这也将极大地促进各国国防科技现代化和信息化的建设。本文介绍了目前各国无人水面艇的研究现状,重点描述了多USV协同系统的研究现状和关键技术,最后设想了未来的发展趋势并展望了应用前景。可以想象,随着机器人、通信工程、计算机、自动化、控制理论等相关学科交叉、融合范围的扩大和各项技术的日趋成熟,USV将呈现出更高水平的智能化、效费比、可靠性和鲁棒性,多USV协同系统也将逐步完善。
[1] 周洪光,马爱民,夏朗.无人水面航行器发展[J].国防科技,2009,30(6):17-20,30.
ZHOU Hong-guang,MA Ai-min,XIA Lang.A research on the development of the unmanned surface vehicles[J].National Defense Science and Technology,2009,30(6):17-20,30.
[2] 李家良.水面无人艇发展与应用[J].火力与指挥控制,2012,37(6):203-207.
LI Jia-liang.Development and application of unmanned surface vehicle[J].Fire Control and Command Control,2012,37(6):203-207.
[3] 薛宏涛,叶媛媛,沈林成,等.多智能体系统体系结构及协调机制研究综述[J].机器人,2001,23(1):85-90.
XUE Hong-tao,YE Yuan-yuan,SHEN Lin-cheng,et al.A roadmap of multi-agent system arcitecture and coordination research[J].ROBOT,2001,23(1):85-90.
[4] YAN Ru-jian,PANG Shuo,SUN Han-bing.Development and missions of unmanned surface vehicle[J].Journal of Marine Science and Application,2010(9):451-457.
[5] http://www.unmanned.co.uk/platforms/unmanned-vehicle-news/unmanned-surface-vehicle-usv-news/[EB/OL].
[6] BERTRAM V.Unmanned surface vehicles-a survey[M].Copenhagen,Denmark,2008:1-4.
[7] YAAKOB O,MOHAMED Z,HANAFIAH M S,et al.Development of unmanned surface vehicle(USV)for sea patrol and environmental monitoring[C].Proceedings of the 8th International Conference on Marine Technology,Kuala Terengganu,2012,MTP-85.
[8] http://hyqb.sh.cn/publish/portal7/tab675/info4887.htm[EB/OL].2010-8-15.
[9] YANG Wen-rong,CHEN Cing-ying,HSU Chao-min.Multi-functional inshore survey platform with unmanned surface vehicles[J].International Journal of Automation and Smart Technology,2011,1(2):19-25.
[10] http://www.bhshipyard.cn/tpxw/265119.htm[EB/OL].2013-6-7
[11] WU Gong-xing,ZOU Jin,WAN Lei,et al.Design of the basic motion control system for water-jet-propelled unmanned surface vehicle[J].Control Theory and Applications,2010,27(2):257-262.
[12] 熊亚洲,张晓杰,冯海涛,等.一种面向多任务应用的无人水面艇[J].船舶工程,2012(1):16-19.
XIONG Ya-zhou,ZHANG Xiao-jie,FENG Hai-tao,et al.An unmanned surface vehicle for multi-mission applications[J].Ship Engineering,2012(1):16-19.
[13] 文逸彦.一种无人翼滑艇艇型的设计技术研究[D].镇江:江苏科技大学,2013.
[14] CURCIO J,LEONARD J,Andrew patrikalakis.SCOUT-a low cost autonomous surface platform for research in cooperative autonomy[C].Proceedings of Oceans 2005 MTS/IEEE.Washington, D.C.,USA,2005:725-729.
[15] CURCIO J,SCHNEIDER T,BENJAMIN M,et al.Auto-nomous surface craft provide flexibility to remote adaptive oceanographic sampling and modeling[C].Proceedings of OCEANS 2008,Quebec City,Canada,2008:1-7.
[16] SCHNEIDER T,SCHMIDT H,PASTORE T.Cooperative autonomy for contact investigation[C].Proceedings of Oceans 10 Institute of Electrical and Electronics Engineers,Sydney,Australia,2010:1-7.
[17] PEDRO AGUIAR A,ALMEIDA J,BAYAT M,et al.Coop-erative control of multiple marine vehicles:theoretical challenges and practical issues[C].Proceedings of the 8th IFAC International Conference on Manoeuvring and Control of Marine Craft,Guarujá,Brazil,2009:412-417.
[18] CARVALHOSA S,AGUIAR A P,PASCOAL A.Cooperative motion control of multiple autonomous marine vehicles:collision avoidance in dynamic environments[C].Proceedings of the 7th IFAC Symposium on Intelligent Autonomous Vehicles 2010,Lecce,Italy,2010:282-287.
[19] AGUIAR A P,PASCOAL A.Cooperative control of multiple autonomous vehicles:current and future trends[R].2010.
[20] REDDING J,AMIN J,BOJ D.,et al.Collaborative mission planning,autonomy and control technology(CoMPACT)for unmanned surface vehicles[C].Proceedings of the AIAA Guidance,Navigation,and Control Conference,Chicago,USA,2009:1-23.
[21] Øivind Aleksander G.Loe.Collision avoidance for unma-nned surface vehicles[D].Trondheim,Norway:Norwegian University of Science and Technology,2008.
[22] CACCIA M,BIBULI M,BONO R,et al.Basic navigation, guidance and control of an unmanned surface vehicle[J].Autonomous Robots,2008,25(3):349-365.
[23] CACCIA M,BIBULI M,BRUZZONE G,et al.Modular USV and payload design for advanced capabilities in marine security applications[C].Proceedings of the 19th Mediterranean Conference on Control and Automation,Corfu,Greece,2011:430-435.
[24] BIBULI M,CACCIA M,LAPIERRE L,et al.Guidance of unmanned surface vehicles:experiments in vehicle following[J].Robotics and Automation Magazine,2012,19(3):92-102.
[25] ALMEIDA J,SILVESTRE C,PASCOAL A M.Cooperative control of multiple surface vessels with discrete-time periodic communications[J].International Journal of Robust and Nonlinear Control,2012,22(4):398-419.
[26] NAEEM W,IRWIN G W.An automatic collision avoidance strategy for unmanned surface vehicles[C].Proceedings of International Conference on Life System Modeling and Simulation(LSMS 2010)and International Conference on Intelligent Computing for Sustainable Energy and Environment(ICSEE 2010),Wuxi,China,2010:184-191.
[27] NAEEM W,IRWIN G W,YANG A.COLREGs-based collision avoidance strategies for unmanned surface vehicles[J].Mechatronics,2012,22:669-678.
[28] CAMPBELL S,NAEEM W,IRWIN G W.A review on imp-roving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres[J].Annual Reviews in Control,2012,36:267-283.
[29] TAM C,BUCKNALL R.Cooperative path planning algorithm for marine surface vessels[J].Ocean Engineering,2013,57:25-33.
[30] http://www.scmp.com/news/china/article/1373490/after-drones-china-turns-unmanned-vessels-boost-its-marine-power goback=%2Egde_94718_member_5814390855959609346#%21[EB/OL].2013-12-5
[31] CUI Jian,YANG Song-lin,XU Hai-tong.Preliminary study on maneuvering motion pattern of unmanned composite trimaran ship model[J].Applied Mechanics and Materials,2012,12(253-255):2218-2222.
[32] ZHAO Jiang,YAN Wei-sheng,GAO Jian,et al.Design and implement of the control system for unmanned surface vehicle based on the VxWorks[J].International Asia Conference on Informatics in Control,Automation and Robotics,2010(2):13-17.
[33] SUN Qiao-mei,REN Guang,YUE Jin,et al.Autopilot design for unmanned surface vehicle tracking control[C].Proceedings of the 3rd International Conference on Measuring Technology and Mechatronics Automatio,2011(155):610-614.
[34] 吴恭兴.无人艇操纵性与智能控制技术研究[D].哈尔滨:哈尔滨工程大学,2011.
[35] 廖煜雷,万磊,庄佳园.喷水推进型无人水面艇的嵌入式运动控制系统研究[J].高技术通讯,2012,22(4):416-422.
LIAO Yu-lei,WAN Lei,ZHUANG Jia-yuan.An embedded motion control system for water-jet-propelled unmanned surface vehicles[J].Chinese High Technology Letters,2012,22(4):416-422.
[36] 徐博,高伟,杨俊巍.基于微惯性网络的多水面无人艇协同导航定位技术研究[C].微机电惯性技术的发展现状与趋势——惯性技术发展动态发展方向研讨会文集,苏州,2011:191-195.
[37] 王卓,冯晓宁,万磊,等.水面无人艇协同仿真平台设计方法[J] .哈尔滨工程大学学报,2012,33(3):275-282.
WANG Zhuo,FENG Xiao-ning,WAN Lei,et al.Research on the platform design method of a USV collaborative simulation[J] .Journal of Harbin Engineering University,2012,33(3):275-282.
[38] 赵连恩,韩端锋.高性能船舶水动力原理与设计[M]. 哈尔滨:哈尔滨工程大学出版社,2007.
[39] 蔡自兴,陈白帆,刘丽珏,等.多移动机器人协同原理与技术[M]. 北京:国防工业出版社,2011.
[40] 崔健.具有一定避碰功能的无人复合三体船模操纵运动模式分析研究[D].镇江:江苏科技大学,2013.
[41] NAVY U S.The navy unmanned surface vehicle (USV) Master Plan[Z].23 July 2007.
[42] 文逸彦,杨松林,马天宇,等.一种复合三体冲翼船[P],中国:201110306781,2012.04.12.
WEN Yi-yan,YANG Song-lin,MA Tian-yu,et al.A composite three-body ram wing vehicles[P],China:201110306781,2012.04.12.
[43] 徐海通.水面两栖无人艇概念设计及快速性和操纵性的初步研究[D].镇江:江苏科技大学,2014.
[44] BREIVIK M,HOVSTEIN V E.Formation control with unmanned surface vehicles:theory and practice[R],2008.
[45] Department of Defense USA,Unmanned Systems Roadmap2007- 2032[R].2007.
[46] Department of Defense USA,FY2013-2038 Unmanned Systems Integrated Roadmap[R].2013.
An outline of current status and development of the multiple USV cooperation system
MA Tian-yu,YANG Song-lin,WANG Tao-tao,XIN Lei,CHEN Yi
(School of Naval Architecture and Ocean Engineering,Jiangsu University of Science and Technology,Zhenjiang 212003,China)
Unmanned Surface Vehicle(USV),featured as a higher degree of intelligence, better stealth performance, stronger mobility and lower cost, is considered as a weapon of new conception for widely warring applications.Among the unmanned vehicles,the development of USV is relatively late,but is gradually becoming a hot research issue.After brief introductin to the current research progress of USV both at home and abroad in this paper.The status of multiple USV cooperation system is presented intensively and five key technologies are described as well,including the type of high performance craft, control system,communication technology,collision avoidance and mission planning and decision.Finally describes a developing trend in the future and the vision of the multiple USV cooperation system in replenishment at sea,protection of security maritime,improving unmanned combat system,collecting hydrological and meteorological information and maritime search and rescue.
unmanned surface vehicle;multiple USV;cooperation system;unmanned combat system;type of high performance craft
2014-03-31
国家自然科学基金资助项目(51379094);江苏科技大学研究生科技创新计划资助项目(12508030020)
马天宇(1989- ),男,硕士研究生,研究方向为船舶与海洋结构物流体力学性能。
U674
A
1672-7649(2014)06-0007-07
10.3404/j.issn.1672-7649.2014.06.002
猜你喜欢
科学大众(2020年23期)2021-01-18 03:09:08
课外生活(小学1-3年级)(2020年2期)2020-03-09 03:24:26
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
汽车观察(2019年2期)2019-03-15 06:00:50
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
摄影之友(影像视觉)(2017年8期)2017-11-27 02:08:34
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
能源(2016年3期)2016-12-01 05:11:02
中国卫生(2016年5期)2016-11-12 13:25:26