大型同步电动机定子绕组双Y接法及三维建模
2014-07-30 09:40郑国丽
中国新技术新产品 2014年5期
丰 帆 郑国丽
(南车株洲电机有限公司,湖南 株洲 412001)
1 概述
电动机绕组是按一定规则安排在定子铁芯槽内,线圈也按相应规律连接起来,绕组的接线与相数、电压、转速以及接法等有直接关系,电机绕组接线错误会导致电机无法运行或者烧毁。其中定子连线的正确性,包括极相组连线的正确和三相的相序正确,极相组线圈数量改变将造成磁场的分布不对称。相序相反将导致定子的旋转磁场方向相反。如果将规定的Y形而误接为△形,运行时会因绕组过电压而发热烧毁,若△形误接为Y形,则电动机将处于欠电压运行,输出功率会降低很多,不能带额定负载,也会因电流增大而烧毁。因此,技术人员和操作人员都需要充分了解电机的技术参数,掌握定子绕组连线的表示方法,使操作人员能够通过定子接线原理图准确了解接线方法,以避免绕组接线时因失误而造成损失。
本文以某大型电动机为例,根据绕组嵌线的技术参数,详细描述了双Y绕组定子连线原理图画法,并将定子线圈和定子连线的三维建模方法进行了说明。目前三维建模成为新的趋势,越来越多的制造企业制图方式逐渐由二维设计转向三维设计,三维建模方法也逐渐普及。在工程实践过程中,二维图纸对实际生产指导作用有限,不可避免的出现设计错误,比如结构尺寸错误造成安装时出现干涉、间隙大、无法安装等情况,使工艺与生产难以进行,造成材料与成本的浪费并拖延了生产进程,造成经济损失。引用三维模型设计可直观的看到装配效果,检查与其他零部件的干涉情况,对工艺及生产实现快速指导及反馈,此外三维模型建立可用于数值模拟分析从而指导电机设计。电机由很多零部件组成,而定子线圈端部为复杂的空间曲线结构相对电机其他部件建模较复杂,因此本文着重介绍了定子线圈和定子连线的三维建模方法。
2 双Y绕组圆形接线图表示法
绕组的接线是在电动机完成嵌线以后进行,首先把每个线圈元件按每极每相槽数值和线圈分配规律接成极相组,然后把属于同相的极相组按要求进行串联、并联或混联接成相绕组。再把相绕组接成△联结或Y联结,最后将引出线接在出线盒的接线板上。

表1 定子绕组嵌线数据
以某大型电动机为例,根据电机绕组的嵌线参数介绍其连线方法,电机绕组嵌线参数见表1:
根据表中参数,电机绕组采用双Y接法,两端出线,每端有36个线圈相连接,每相组有3个线圈,两端均采用星型联结即将三相绕组末端接在一起,始端接引出线。通过两个连线图分别表示电机两端的定子连线接法,首先画出电机一端定子连线图,连线图方向以A向表示。

图1 A向定子接线图
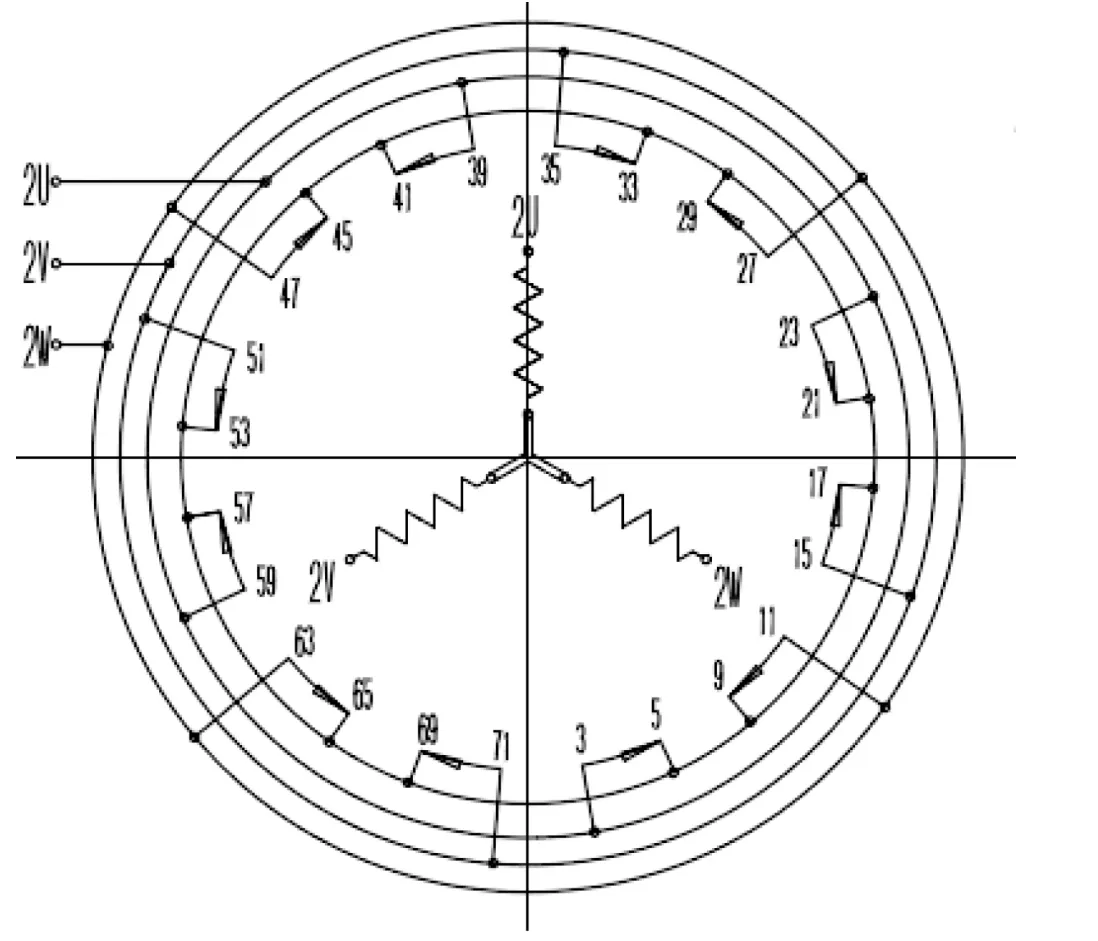
图2 B向定子接线图
定子绕组所有线圈的连接方法一般采用展开图或圆形图表示,为了清楚的看出各极相组之间的连接方法,本文采用一种简化的圆形接线图表示连接方法。画圆形接线图时,无论每极每相有几个槽,或一个级相组有几个线圈,每个级相组都用一个带箭头的圆弧短线表示,箭头表示电流方向,箭头方向为一正、一反、一正、一反相间隔。
(1)圆弧线段数量的确定:圆弧线段的数量就是一台电动机极相组数,本台电动机为三相4级电机,圆弧线段数为相数乘级数,即3×4=12,以相序为U、W、V、U…的次序排号。
(2)并联支路连接,并联支路数是指在定子绕组中每相中有多个极相组的引线头直接与电源相连接叫绕组的并联支路。4路并联,即每相中有4个极相组的引线头直接与电源连接。电机为4级电机4路并联,按照相序排号和电流方向把各相连接起来。
(3)电机有72槽72个线圈,用序号1-72作为线圈槽的编号,电机两端各有36个线圈相连接,每极每相有3个线圈,将线圈槽的标号表示在定子连线图上如1所示。电机另一端B向接线图,接线表示方法与A向相同,B向定子接线图如图2所示。
3 定子线圈及定子连线三维建模
3.1 定子线圈三维建模方法
采用NX软件进行定子线圈的三维建模主要分为四大步骤:
(1)建立线圈直段模型。首先根据定子铁芯冲片的尺寸确定线圈槽的位置,再根据线圈截面尺寸,槽内绝缘的结构参数画出圆周方向线圈截面的草图,最后根据线圈节距和线圈有效边的长度通过截面拉伸创建线圈直段。也可通过其他方法进行线圈直段建模,但是通过截面草图的方法,可精确线圈截面位置,避免装配时线圈与铁芯、线圈与线圈、线圈与绝缘垫条之间出现干涉现象。
(2)建立线圈鼻部模型。首先建立基准平面,然后根据鼻部抬升高度、鼻部伸出长度、鼻部转弯半径及线圈截面等尺寸,在平面中建立鼻部轨迹草图,利用截面拉伸形成线圈鼻部;
(3)建立线圈端部弧模型。根据投影关系,在平面中画出线圈弧段部分草图,再将其投影到线圈弧段所在的弧面上,得到弧段轨迹,采用拉伸和加厚命令形成线圈弧段。
(4)模型搭接。将线圈直段与端部弧段、端部弧段和鼻部之间采用桥接曲线及缝合命令将各部分顺滑的连接起来,完成整个线圈的三维建模,单个线圈的三维结构图见图3。
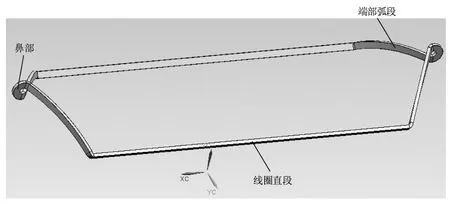
图3 定子线圈结构
3.2 定子连线三维建模方法
(1)标记,首先可将线圈按照顺序编号,然后将线圈通过不同颜色显示区分线圈引出线方向,引出线方向相同的线圈用同种颜色标识,避免连接时混淆出错。
(2)建立单个定子线圈引线头模型,通过旋转、复制命令完成圆周方向引线头模型建立。极相组线圈之间的连接,将相互连接的引线头采用桥接曲线以及多引导线扫掠命令将各部分顺滑的连接起来,同样连接好一个以后可根据线圈的分配规律进行旋转复制。
(3)建立导电环模型。将中性环、U相、W相、V相环按照与线圈的空间相对位置建模,一端导电环建好以后,另一端导电环可通过镜像命令获得。
(4)将极相组的引线与导电环连接。根据定子接线原理图,将引线与相对应的导电环相连接,连接方法同样采用桥接曲线和扫掠命令,定子连线的三维结构如图4所示。

图4 定子连线三维结构图
结语
本文根据某大型双Y绕组电动机的定子绕组嵌线参数,详细描述了双Y绕组定子接线图的表示方法和画图步骤,对电机从业人员掌握定子连线原理图具有一定的参考价值;并且介绍了定子线圈以及定子连线的三维建模方法,解决了空间曲线建模的难点,建模方法适用于多种电机绕组的结构设计,同时定子绕组和绕组连线的三维模型设计可直观的看到装配效果,检查绕组嵌线时的干涉情况以及连线是否正确,避免了不必要的设计错误造成的经济损失,同时三维模型也可用于数值分析指导电机设计和结构改进。
[1]汤蕴璆,等.电机学[M].上海:上海科学技术出版社,2007:08-47.
[2]潘成林.实用中小型电机手册[M].北京:机械工业出版社,2008:121-152.
[3]潘品英.怎样画电机修理时的绕组接线图[M].北京:机械工业出版社,2006:01-24.
猜你喜欢
机械工程师(2023年9期)2023-09-15
电子设计工程(2022年24期)2022-12-23
快乐语文(2021年27期)2021-11-24
光学精密工程(2021年8期)2021-10-04
快乐语文(2021年11期)2021-07-20
快乐语文(2020年36期)2021-01-14
快乐语文(2019年12期)2019-06-12
四川建筑(2015年4期)2015-06-24