摄影测量新核“芯”
2014-07-25 06:05陈铭亮
数字通信世界 2014年1期
陈铭亮
(北京北斗星通导航技术股份有限公司,北京 100094)
测绘工作是一个国家的重要基础工作,在国民经济的发展中起着不可或缺的作用。随着科技的发展和社会的进步,测绘工作也向信息化、数字化、自动化发展。我国空间地理信息的变化很快,大量的事实证明,传统的测绘方式已经远不能满足日益快速变化的空间信息需要:一种是传统的人工内外业结合的方式,耗时费工,要完成全部的空间地理信息建设需要数十年;另一种是卫星遥感与航空摄影测量,适用于大面积作业,但是成本高、精度低、判读难。在这样的环境下,移动测量系统(MMS)应运而生。
1 组合导航产品在陆地移动测量领域的应用
通过在移动载体上装配GNSS(全球导航卫星系统)、CCD(视频系统)、INS(惯性导航系统)或航位推算系统等先进的传感器和设备,快速采集城市实景影像及各种城市设施的空间位置数据和属性数据,后期通过复杂的数据整合,形成城市全要素、可视化、可测量的实景三维数据平台。
1.1 车载移动测量系统组成
车载移动测量系统主要有以下组成(见图1):
⊙ 摄像机。系统摄像设备,主要用于车辆行驶过程中视频拍摄。
⊙ CCD全景相机。系统立体摄影测量影像获取设备,道路测量时拍摄影像,以构成立体像对。
⊙ 激光扫描仪。系统物体三维模型测量设备,获取车辆周围物体三维建模所需点云数据。
⊙ GNSS+INS组合导航系统。系统位置、速度、姿态测量设备,提供车辆精确的位置、速度、姿态信息,从而换算至激光雷达和CCD相机中心。
⊙ 里程计。系统车辆速度、位移测量设备。当GNSS卫星信号失锁时,通过测量车辆车轮位移量来辅助INS解算。
⊙ 时间同步系统。它是移动测量系统各传感器间联系的纽带,是系统标定和数据解算的基础,各传感器以GPS时间为主线,形成一个有机的统一体。
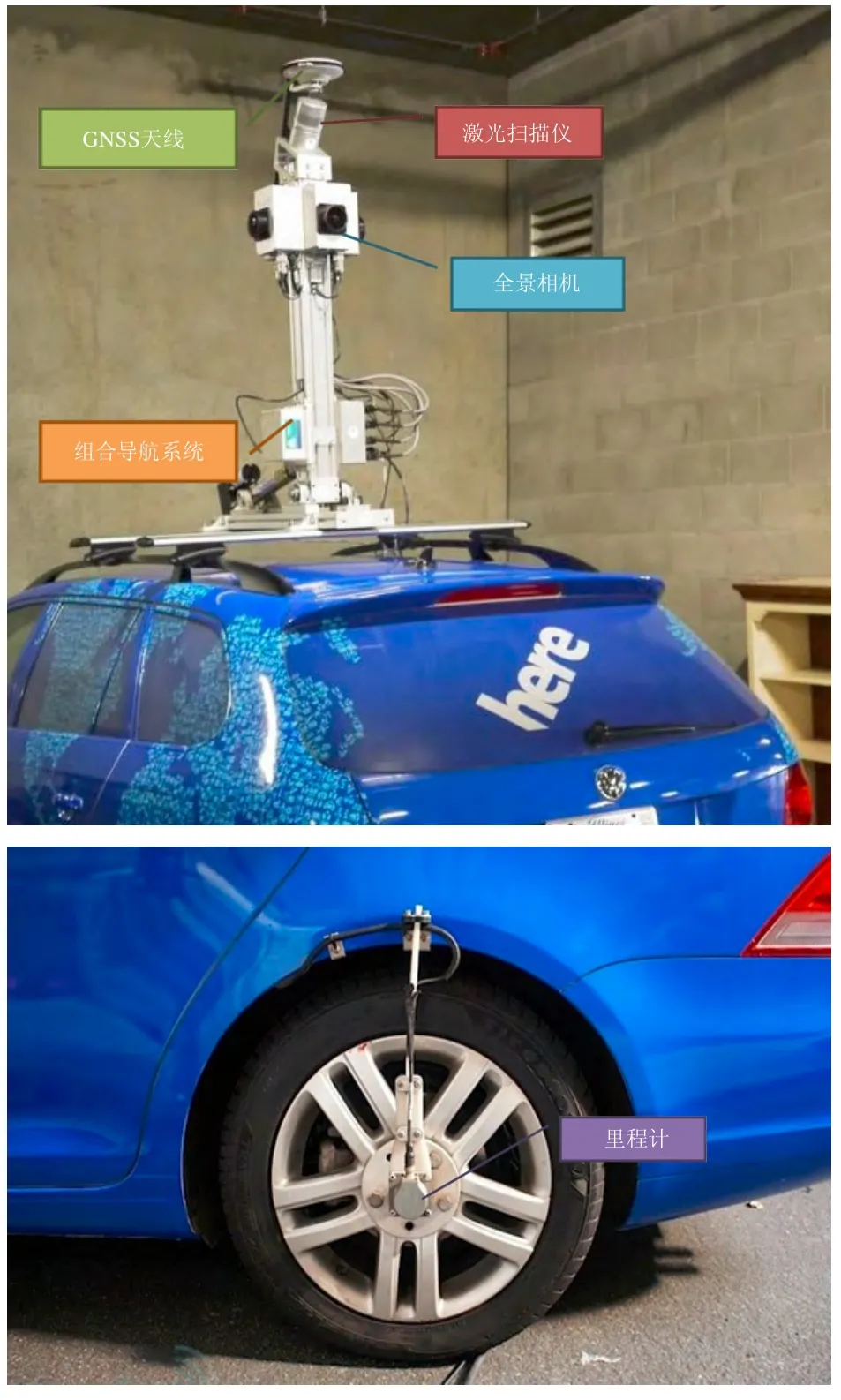
图1 车载移动测量系统组成
车载移动测量系统将激光扫描仪、IMU、相机和里程计所采集的信息基于GPS时间系统进行统一。GNSS和IMU组成的组合导航系统,结合里程计提供的测量信息进行组合导航,获取系统同样基于GPS时间系统的姿态和位置数据。激光扫描仪和相机用来获取目标地物的坐标和影像数据,通过GPS时间对齐,结合姿态数据融合生成带有绝对坐标的彩色点云数据。
1.2 车载移动测量系统的优势
(1)数据获取效率高。不受空域、阴天等因素限制,作业灵活;每天可完成上百公里基础地理数据的采集。
(2)安全性高。大大减少外业控制测量;提高外业人员的安全性。
(3)精度高、成本低。测点精度可达厘米级;可根据实际要求对不同性能等级的系统部件进行灵活选择。
车载移动测量系统可广泛应用于高清街景采集、城市部件管理、高级驾驶辅助系统(ADAS)路面信息采集、道路设施调查、城市三维建模等领域。
2 组合导航产品在航空摄影测量领域的应用
随着国土测绘作业的系统化和细致化,以及民用地图用户的爆炸式发展,以及人们对空中娱乐项目的追求,航空摄影测量逐渐成为一块越来越重要的市场,而由于GNSS全球卫星导航系统和惯性测量技术的不断提高,GNSS+INS组合系统在航空摄影测量领域中逐步成为热点应用(见图2)。
在进行航空摄影作业过程中,对摄相机的倾斜角有较为苛刻的要求:即航摄像片倾斜角应越小越好,一般不应大于2°,个别最大倾斜角不应超过3°。然而,在实际的作业中,一方面,飞行器的飞行姿态会持续改变,另一方面,飞行器发动机势必会产生或大或小的随机振动。而这些因素都会改变航空摄影机的拍摄角度,直接影响到拍摄画面的质量甚至可用性,因此,摄相机必须装载于可以自动调节惯性平台上,从而确保摄相机与地面对象之间的拍摄角度始终保持在可控范围。
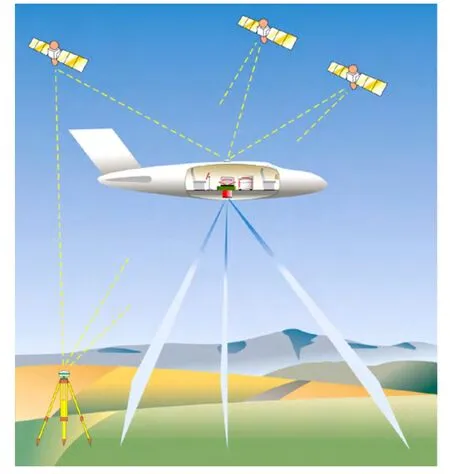
图2 航空摄影测量应用组合导航产品
诺瓦泰SPAN-IGM是一款基于紧耦合技术的一体式GNSS+INS MEMS组合导航系统,可作为飞行器摄影稳定平台的姿态测量。同时,通过NovAtel高精度GNSS接收模块,为航空摄影测量提供精准的经纬度、高度及速度信息。另外,由于航空飞行器、尤其是无人机类载体对所装载设备的体积和重量有严格的要求,SPAN-IGM体积小(152 mm×137 mm×50.5mm)、重量轻(<540g),非常适用于航空摄影测量应用。
3 组合导航产品在海洋测图领域的应用
随着国家对海上领土的重视,海上实力的发展已经初见端倪。在海洋装备的分类中,船载平台的姿态测量又是一个主流应用。然而在海上特殊的环境下,由于风浪及潮汐等的影响,船体受到的复杂扰动较多,导致船体起伏不定,而船用测量滤波技术中有效地解决了这一问题,使得海洋应用的选择更加便捷。
海上应用需要感应出船体姿态的细微变化,对惯性产品的精度要求较高,并且对长期稳定性的要求也很高。其中,大中型船体的测姿系统以高精度惯导(激光、高精度光纤以及液浮陀螺)为主,用以测量船体姿态的细微变化;小型民用渔船对姿态测量要求很低,通常会采用精度较低的小型AHRS系统(姿态方位参考系统)辅助卫星自动跟踪天线,接收地球同步卫星发射的通信信号。
然而,尽管在多数情况下,船舶在水面上的起伏量较小,但是起伏却几乎不能避免,并且船体起伏对具体的作业(比如对海深的测量)有直接的影响,因此,多数惯导产品在具体使用中稳定性和环境适应性存在一定的问题。为更好地解决这一问题,Novatel组合导航产品嵌入了强大的Heave技术。
Heave 是内置在GNSS+INS 组合导航产品中的滤波技术,能够估算出短时间内船舶相对于平均海水面的起伏情况,实现对船体最高可达3.5cm垂直位移的精确测量,能提供船舶的位置、速度和姿态全部6个自由度的测量信息。

图3 海洋测图应用组合导航产品
在海洋绘图应用中,船舶的起伏运动对声纳测距的精度有直接的影响。为解决这一问题,强大的Heave 技术通过补偿船体起伏引起的误差,配合声纳测距系统可以使绘制出的海底地图能更加准确、连贯、平滑(如图3)。
诺瓦泰(NovAtel)SPAN系列惯导均采用Heave技术,能够估算出船舶相对于平均海水面由波动引起的短期的垂直位移,因而声纳系统可以补偿因这些因素引起的距离误差。
SPAN-LCI是一款采用紧耦合技术的组合导航产品,配备战术级的光纤IMU,其航向角精度可以达到0.008°、水平姿态0.005°,非常适合应用于具有作业要求的船只,尤其是声纳测深,海地测图等应用方向。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
汽车实用技术(2022年10期)2022-06-09
铁道通信信号(2020年8期)2020-02-06
航空知识(2019年1期)2019-01-11
环球飞行(2018年7期)2018-06-27
中国公共安全(2017年11期)2017-02-06
中国房地产业(2016年9期)2016-03-01
中国非金属矿工业导刊(2015年5期)2015-12-22
电源技术(2015年2期)2015-08-22
焊接(2015年9期)2015-07-18