
基于AMESim与Simulink的绞车速度同步控制系统研究
2014-07-25 06:44:40陈永清刘伟亮徐其彬徐新和
三峡大学学报(自然科学版) 2014年6期
陈永清 刘伟亮 徐其彬 徐新和
(三峡大学 机械与动力学院,湖北 宜昌 443002)
液压绞车是利用液压马达直接或通过减速箱间接来拖动滚筒的一种绞车,常用于港口、建筑、矿山和林业等行业.本文所研究的液压绞车用于摊铺机的牵引,两台绞车共同牵引一台摊铺机工作,绞车牵引速度的平稳性、同步性将直接影响摊铺作业的质量和效率,但由于液压波动、系统泄漏、外部干扰等因素的影响,常常出现同步误差,如何保证双绞车牵引速度同步是摆在设计人员面前的重要问题.
仅按静态过程对液压系统设计,很难达到系统的性能要求,而采用样机试验在时间和成本上花费较大,因此本文采用计算机仿真的方法研究系统性能,采用AMESim和Simulink联合仿真分析绞车在模糊PID控制下的同步性能.
1 绞车工况分析与液压系统设计
1.1 绞车工况分析
摊铺机牵引绞车平台是为水库坡面沥青摊铺碾压工程设计的专用平台,平台主要由底盘、机架、两台摊铺机液压绞车,送料车液压绞车、旋臂起重机、斜平台、司机室等组成.两台摊铺机绞车卷筒对称布置在平台后部左右两边,摊铺机本身无驱动和转向系统,为了保证摊铺质量和作业效率,绞车的牵引速度要有很高的稳定性和同步性,起步和制动时速度变化平稳而快速,具有较强的抗外负载干扰能力,要达到以下几点基本要求:①具有摊铺作业与高速行走两种工作模式,两种模式下均要求起步平稳、能无级调速,速度变化范围分别为0.5~5m/min和0~15m/min,牵引力分别为110kN和77kN;②在两种模式下,都能够实现摊铺机直线行驶,要求两绞车具有较高的速度同步性能;③由于运料车撞击、摊铺料减少、路面不平整等原因导致钢丝绳牵引力变化时,要求绞车牵引速度稳定.
1.2 液压系统设计
双绞车液压系统原理如图1所示,系统主要包括变量泵主泵、辅助泵、变量马达、变量机构、高压溢流阀组、补油溢流阀组、压力切断阀、冲洗阀,控制单元等组成,采用闭式变量泵控变量马达回路,马达排量采用两点式控制,在摊铺模式下马达调到较大的排量,保证能提供较大的转矩,高速行走模式下马达调到较小的排量,保证马达高速转动,通过调节变量泵变量机构改变泵的流量,进而调节马达转速.

图1 双绞车液压系统原理图
两台绞车分别独立驱动,集中控制,在控制器输入一定信号,变量泵变量机构的比例阀阀芯移动,控制油液进入变量缸,推动斜盘到一定倾角,改变泵的排量,泵的流量变化实现马达的转速改变,两马达均装有角速度传感器,测得马达转速反馈到控制器,与输入信号对比,形成独立的反馈控制,同时,两传感器测得的马达转速进行比较,将速度差值信号反馈到控制器,形成主、从两绞车的同步.
2 模糊PID控制器的设计
2.1 模糊语言变量与隶属度函数设计
模糊控制器采用两输入三输出结构,输入为绞车牵引速度偏差e及其变化率ec,输出量为PID控制器的比例系数调节量dKP、积分系数调节量dKI、微分系数调节量dKD,且这两个输入量对于3个输出量取相同的隶属度函数[1].
绞车在摊铺模式下最大牵引速度为0.083m/s,高速行走模式下最大牵引速度为0.25m/s,取绞车牵引速度偏差范围为[-0.1 0.1],则基本论域设为[-0.1 0.1],偏差变化率基本论域为[-0.5 0.5],量化因子分别取10和12,输入的模糊语言变量E和EC的模糊论域均为[-6 6].通过不断调节修正,比例、积分、微分系数调节量dKP、dKI、dKD分别确定为[-1 1]、[-0.5 0.5]、[-0.5 0.5],输出的模糊语言变量分别为 ΔKP、ΔKI、ΔKD,模糊论域均取[-10 10],则量化因子分别为0.1、0.05、0.05.
输入、输出语言变量的语言值都设定为7个,即{NB,NM,NS,Z0,PS,PM,PB},各符号分别表示负大、负中、负小、零、正小、正中、正大.
设定模糊语言变量E、EC、ΔKP、ΔKI、ΔKD的隶属度函数均采用三角形隶属度函数,三角形隶属度函数是应用最多的隶属度函数,具有数学表达简单,运算快速的特点,模糊变量输入、输出隶属度见表1.
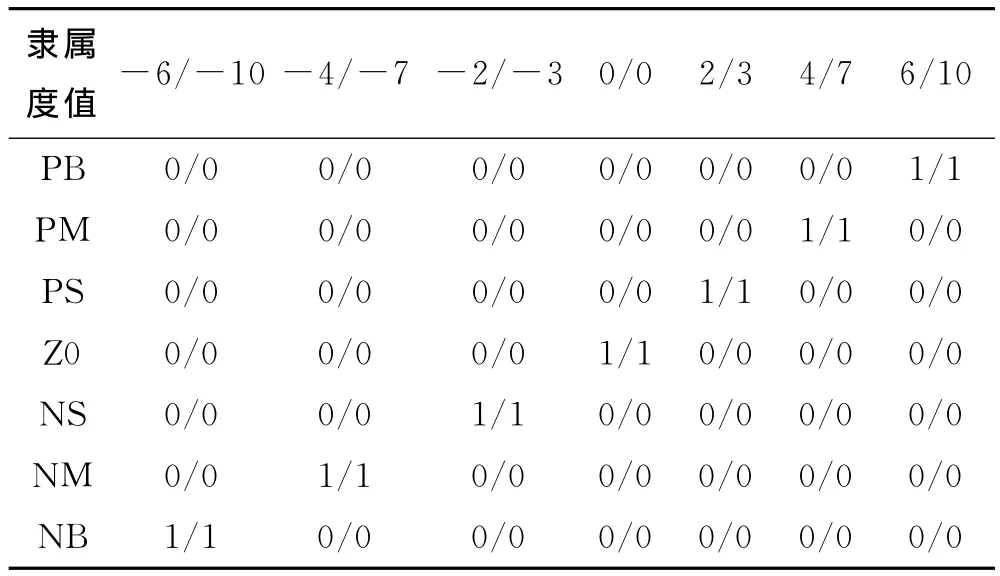
表1 模糊变量输入/输出隶属度函数分布
2.2 模糊规则集设定
模糊控制器选择Mamdani规则,针对绞车牵引速度平稳的控制要求,模糊算法对参数的推理规则为:当速度偏差较大时,比例增益值取大值增加系统响应速度,微分增益取中等大小的值以减少系统响应时间,防止微分饱和溢出,此时去除积分避免出现超调和积分饱和;当速度偏差和偏差变化率均为中等大小时,为保证上升时间,应适当减小比例增益;系统出现超调时,应强化积分作用,使系统尽快回到稳态值;超调误差减小呈现向稳态变化的趋势时,再使用积分会出现系统回调,去除积分作用;微分增益取适中值保证系统响应速度;当系统的速度偏差较小时,增加比例和微分作用,应注意振荡现象的产生;偏差变化率不大时加大微分作用[2].
根据速度偏差、偏差变化率及以上规则,初步设计模糊控制规则见表2.
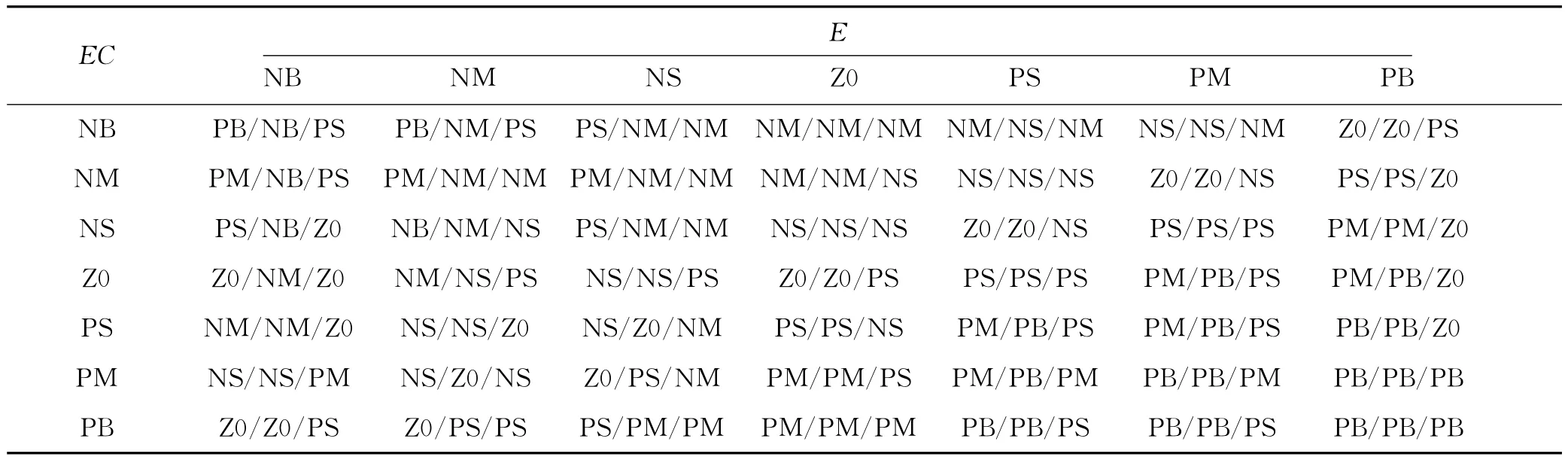
表2 模糊变量ΔKP/ΔKI/ΔKD的模糊规则表
3 建立仿真模型
建立绞车液压系统仿真模型,首先在AMESim中建立液压回路模型,其次在Simulink中建立控制系统模型,通过联合仿真分析基于模糊PID控制的系统性能.
3.1 建立AMESim液压回路模型
利用AMESim软件的HCD库搭建比例阀和变量缸的模型,利用信号库和机械库元件搭建反馈杆调节机构模型,建立变量机构仿真模型如图2所示,图中端口1、2为比例电磁铁电流信号输入口,端口3为伺服压力油液输入口,端口4为变量缸伸出位移量,推动斜盘倾角变化.
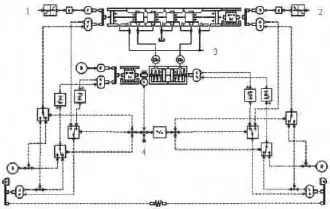
图2 变量泵变量机构模型
变量缸活塞杆位移与斜盘倾角之间的关系为[3]

式中,xp为变量缸活塞杆伸出位移(m);L为变量缸对斜盘力的作用点与斜盘铰接点的距离(m);γ为变量泵斜盘倾角(rad).
当γ很小时,有sinγ≈γ,上式可近似简化为
其他液压元件采用AMESim液压标准库中的模型,绞车负载模型中的减速机、卷筒、钢丝绳、质量块、负载力等模型采用AMESim机械标准库中的模型,建立仿真模型如图3所示,图中“bianliangjigou”模块是由变量泵变量机构模型建立的超级元件模型,图中“TO SIMULINK”模块是AMESim软件与Simulink软件的接口模块[4].
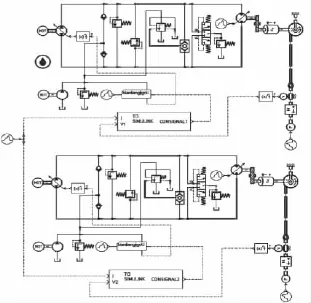
图3 绞车系统AMESim模型
3.2 建立联合仿真模型
在Simulink中建立模糊控制器模型如图4所示,输入为反馈的绞车速度信号与输入信号的偏差,输出为PID 3个参数的调节量,将模型封装为“Fuzzy Controller”模块.再调用由绞车系统AMESim模型编译而成的S函数模块,建立系统联合仿真模型如图5所示.
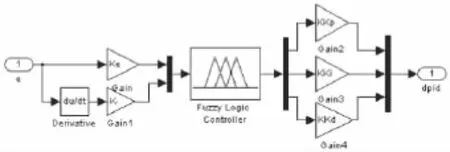
图4 模糊控制器模型
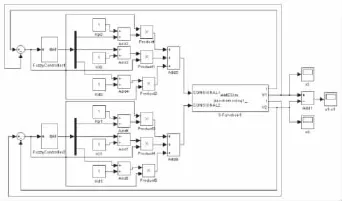
图5 绞车系统联合仿真模型
4 仿真分析
在AMESim模型中设置各元件参数,分别仿真绞车在摊铺作业模式和高速行走模式下的动态性能.
4.1 摊铺作业模式下性能
在Simulink中,设定PID控制器初始参数为KP0=0.9、KI0=3.5、KD0=1,仿真摊铺机摊铺模式下最大速度0.083m/s时的工况,比例阀输入332mA阶跃电流信号,仿真时间5s,质量块模型速度曲线如图6所示,系统在0.6s时刻达到峰值0.108m/s,超调量30%,在1.4s时达到稳定状态,系统调整时间短,稳态精度高.

图6 绞车牵引速度响应曲线
摊铺机在工作时可能由于运料小车的撞击、料斗加料不均、路面不平整等因素致使两侧钢丝绳受力不均,对一侧绞车在6s时刻施加阶跃外负载200kN,仿真观察两侧绞车的速度变化曲线如图7所示.

图7 受冲击后速度变化曲线图
绞车受冲击力后,速度瞬间减小到约0.7m/s,在7s时调整回正常速度值,在6.5s时有峰值约0.90 m/s.位移变化曲线如图8所示,在6.3s时刻两侧最大位移差仅为3mm.可见摊铺模式下系统在一侧受冲击时,两绞车速度同步性很好.
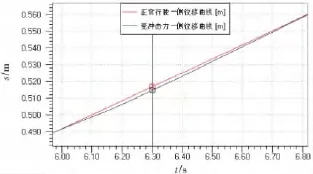
图8 受冲击后位移变化曲线
4.2 高速行走模式下性能
仿真高速模式下最大速度0.25m/s时的工况,比例阀输入480mA阶跃电流信号,仿真时间5s,质量块模型速度曲线如图9所示,系统在0.6s时刻达到峰值0.28m/s,超调量12%,在1.4s时达到稳定状态,系统调整时间短,稳态精度高.
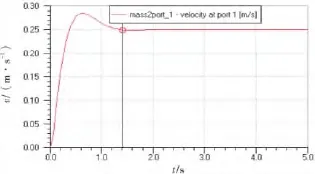
图9 绞车牵引速度响应曲线
同样对一侧绞车施加阶跃负载,仿真观察两侧绞车的速度变化曲线如图10所示,绞车受冲击力后,速度瞬间减小到约0.18m/s,在7s时调整回正常速度值,在6.5s时有峰值0.27m/s.位移变化曲线如图11所示,在6.2s时刻两侧有最大位移差为18mm.可见系统在高速行走模式下一侧受冲击时,两绞车仍能保持很好的速度同步性.
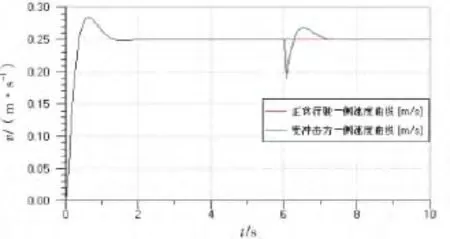
图10 受冲击后速度变化曲线图

图11 受冲击后位移变化曲线
5 结 论
根据绞车牵引速度快速性、平稳性、同步性等特性要求,设计了泵控马达液压系统和模糊PID控制器,分别在AMESim和Simulink中建立液压系统模型和控制器模型,仿真分析了绞车在摊铺作业模式下和高速行走模式下的性能,结果表明所设计绞车系统对阶跃输入信号响应快速、准确,在外负载干扰条件下具有较高的速度同步性,满足实际工况要求.
[1] 郭振兴,房建东,房彦伟.电液比例位置系统模糊自整定PID控制器设计与仿真研究[J].液压与气动,2007(12):23-26.
[2] 付辰琦.摊铺机行走速度平稳控制的研究[D].秦皇岛:燕山大学,2012.
[3] 李 帅.泵控马达闭式回路调速控制系统特性研究[D].杭州:浙江大学,2010.
[4] 付永领,祈晓野.LMS Imagine.Lab AMESim 系统建模和仿真参考手册[M].北京:北京航空航天大学出版社,2011.
猜你喜欢
小学生导刊(2017年15期)2017-05-17 05:44:09
棋艺(2016年4期)2016-09-20 06:15:27
中国塑料(2016年3期)2016-06-15 20:30:00
同煤科技(2015年4期)2015-08-21 12:51:04
筑路机械与施工机械化(2014年8期)2014-03-01 03:01:06
筑路机械与施工机械化(2014年5期)2014-03-01 02:59:22
筑路机械与施工机械化(2014年5期)2014-03-01 02:59:19
筑路机械与施工机械化(2014年4期)2014-03-01 02:58:45
河南科技(2014年24期)2014-02-27 14:19:41
河南科技(2014年12期)2014-02-27 14:10:35
