一种爬楼梯轮椅的运动分析
2014-07-20 04:02:20李占贤巩喜然
机械工程与自动化 2014年4期
李占贤,巩喜然
(河北联合大学 机械工程学院,河北 唐山 063009)
0 引言
随着我国经济的发展,高层建筑逐渐增多,一些常年卧床的重病或突发病患者,医院要求卧姿运送,而很多高层民宅上的电梯空间不能容纳医疗担架,致使抬着病人走楼梯的现象时有发生。国内有很多星轮式概念设计[1-4],由于体积大等缺点很难真正实施推广。Murray J Lawn[5]等人研制了一种性能良好的履带式轮椅,但较为笨重。本文介绍了一种新型电动爬楼梯轮椅,其结构简洁、实用性强、平地行走阻力小,适合多种楼梯结构、价格相对低廉,适合批量生产。
1 爬楼梯轮椅的结构及工作原理
图1 为爬楼梯轮椅各状态结构简图。其行走机构采用行星轮,行星轮具有机构简单、质量小的特点,可降低整体重量,且可同时满足上、下楼梯和在平路上行走的功能。前、后腿共同构成其腿机构,该机构采用前腿长后腿短形式,前腿较长与地面倾斜放置且与椅面通过转动副连接,后腿较短与地面垂直放置且与椅面通过转动副和移动副连接。这样,整个腿机构构成一个并联系统,该并联系统具有3个自由度,通过3个自由度的配合使机构在爬楼梯过程中椅面保持水平。
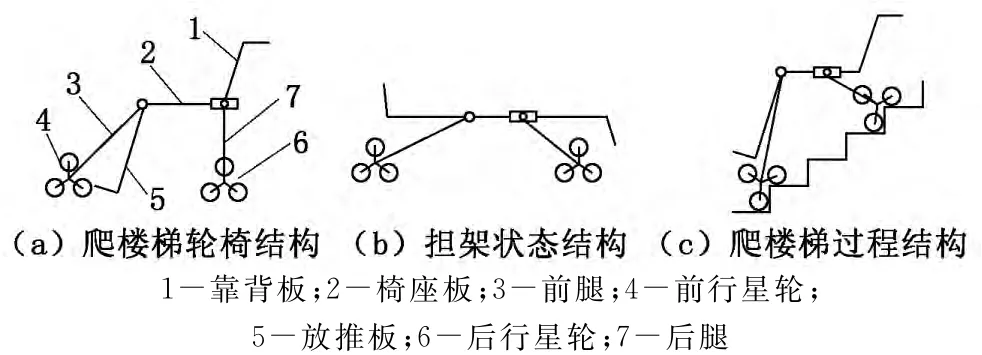
图1 爬楼梯轮椅各状态结构简图
2 爬楼梯轮椅机构运动学分析
通过对机构进行运动学建模,计算出各运动副的运动规律。爬楼梯过程中后腿机构简图如图2 所示。
图2 中,H1,H2,H3分别为各状态下椅面到地面的距离;a0为后腿转动副到其前面第一个台阶的水平距离;lh为后腿长度;r为行星轮半径;ls1为图2 (a)到图2 (b)过程中移动副移动距离;ls2为图2 (b)到图2 (c)过程中移动副移动距离;θ1为图2 (a)到图2 (b)过程中后行星轮转动角度;θ2为图2 (b)到图2 (c)过程中后行星轮转动角度,且令θ=θ1+θ2。
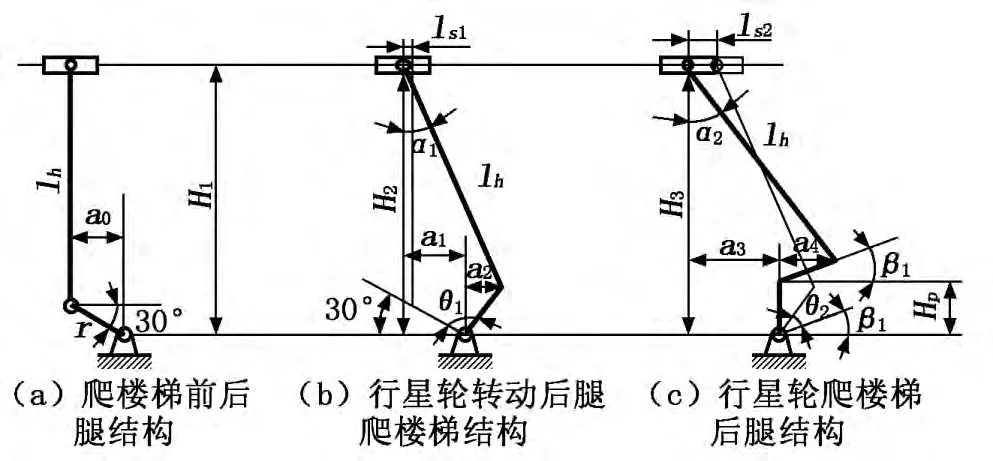
图2 爬楼梯过程中后腿机构简图
在图2 (a)中有:

当行星轮刚接触楼梯台阶时,行星轮绕前轮圆心做圆周运动(图2 (b)),此时行星轮转动半径与垂直方向夹角为:30°+θ1-90°=θ1-60°。因此图2 (b)中有:


图2 (a)到图2 (b)过程中移动副移动距离ls1为 :

图2 (c)运动过程中,最下面的小轮开始沿台阶向上移动,前面的小轮开始水平向前移动,直到该行星轮爬上第一个台阶。图2 (c)中有:
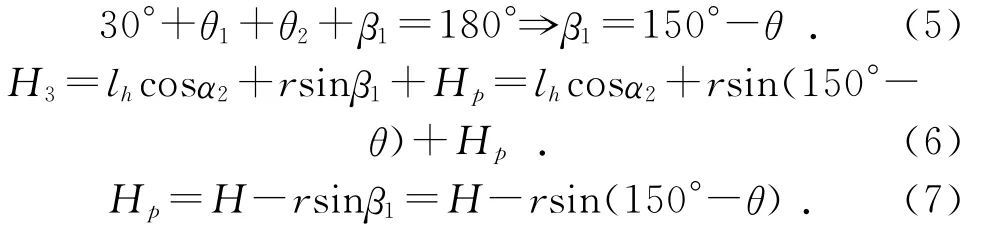
其中:H为楼梯台阶高度。图2 (b)到图2 (c)过程中移动副移动距离ls2为:


图3 为爬楼梯过程中前腿机构简图。此过程中后腿回复到初始垂直状态,即做图2 过程的逆动作,前腿lq通过绕E0摆动来维持椅面水平。图3 中,β3,β4分别为前腿摆动前、后与垂直方向的夹角,E0E′1=lh。
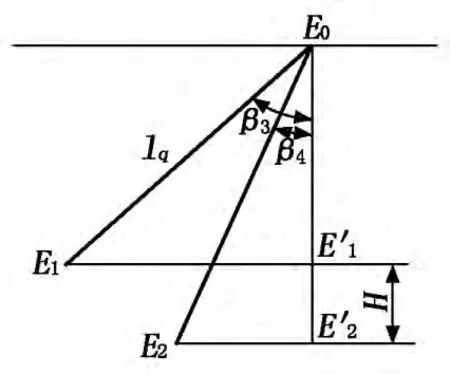
图3 爬楼梯过程中前腿机构简图
之后,后腿及后行星轮重复图2 的各个动作,前腿及前行星轮不动。
图4 为爬楼梯过程腿结构简图。此过程中后行星轮位置不变,前腿摆动直到与地面垂直,后腿通过摆动及移动维持椅面水平。图4 中,β5,β6为后腿摆动前、后与水平方向的夹角。
在图4 中有:
当后行星轮转过一个周期时(θ=120°),且sinβ5=则前腿摆角为:

后腿移动副移动距离为:

后腿摆角为:
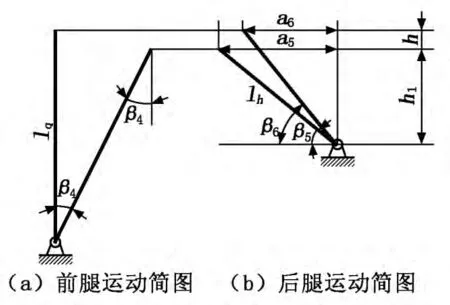
图4 爬楼梯过程腿机构简图
3 对爬楼梯轮椅运动学建模的验证
在数学建模过程中,对机构的运动过程进行了分析,下面对该过程进行验证。设lq=750,lh=500,r=120,H=150。
从图2 (a)到图2 (c)过程为后行星轮爬越第一个台阶,当爬完第一个台阶时,行星轮转过一个周期(即(θ=120°)),且β1=0。将数值代入式(9)、式(11)得:cosα2=0.8,H′=150,即一个台阶的高度。所以当行星轮转过120°时,后行星轮中心高度增加一个台阶高度。
在图3 到图4 过程中,前腿摆动维持椅面平衡,当前腿由β3摆动到β4时,将数值代入式(15)得前腿摆动调整高度为:hbh=150,即一个台阶高度。即后轮爬上一个台阶,前腿调整一个台阶的高度。
图4 中,后行星轮又爬上一个台阶,将数值代入式(21)得:H″=300,即两个台阶高度。即此时两个行星轮之间相差两个台阶高度。
之后,前后行星轮做相同的运动,椅面始终保持水平,验证略。
4 结论
本文中提出了一种新型爬楼梯轮椅机构,该机构通过其腿部的运动使其在爬楼梯过程中椅面始终保持水平,此外该机构可通过简单的变形成为担架,提高病人的抢救效率。
[1]王占礼,赵德超,陈延伟,等.曲柄星轮式爬楼梯轮椅爬升机构设计[J].长春工业大学学报(自然科学版)2011,32(2):105-108.
[2]苏和平,王人成.一种双联星形轮机构电动爬楼梯轮椅的设计[J].中国临床康复,2005(26):144-145.
[3]金强,吴昌林,刘香香.行星轮式爬楼梯轮椅的应用研究[J].中国康复医学杂志,2011,26(1):65-68.
[4]李超,胡延平,韦端利.一种轮组结构的爬楼梯轮椅的设计[J].现代机械,2010(6):42-44.
[5]Lawn M J,Ishimatsu T.Modeling of a stair-climbing wheelchair mechanism with high single step capability[J].Neural Systems and Rehabilitation Engineering,IEEE Transactions on,2003,11(3):323-332.
猜你喜欢
数学小灵通(1-2年级)(2024年3期)2024-05-14 09:28:48
轨道交通装备与技术(2022年2期)2022-05-20 09:00:26
设计(2021年9期)2021-05-11 15:43:58
环球时报(2018-11-09)2018-11-09 04:17:04
知识窗(2017年9期)2017-09-28 23:19:42
课外生活(小学1-3年级)(2017年4期)2017-05-22 18:58:18
读写算·小学低年级(2016年5期)2016-05-14 20:32:43
中学科技(2015年10期)2016-01-06 05:55:38
中国卫生(2015年6期)2015-11-08 12:02:50
红领巾·萌芽(2015年2期)2015-04-10 21:46:52