卫星在轨故障地面诊断系统设计
2014-07-19 13:56:26赵文董云峰
航天器工程 2014年3期
赵文 董云峰
(北京航空航天大学宇航学院, 北京 100191)
卫星在轨故障地面诊断系统设计
赵文 董云峰
(北京航空航天大学宇航学院, 北京 100191)
为解决卫星在轨故障诊断问题,提出了一种故障地面诊断方法,并进行了诊断系统设计。在诊断方法中,建立了卫星各系统耦合的整星模拟器,利用卫星遥测与模拟器预测值形成残差,滤除遥测信息中已知的动态规律部分,缩小故障诊断阈值,提高故障检测的准确性,最后运用信号分析或机器学习的方法对残差实现诊断。诊断系统由遥测接口程序、整星模拟器、残差诊断程序、诊断调度程序、相关数据库和配套工具构成。从系统结构设计和算法的参数化设计两方面,分析了卫星故障地面诊断系统设计,并用建成的系统样机进行了验证。系统样机运行结果表明,这种方法和系统设计思路是可行、有效的。
卫星故障诊断;整星模拟器;复杂系统;残差诊断
1 引言
随着我国航天事业的发展,在轨卫星的数量越来越多,其安全也越来越受到关注。如果不能及时准确发现卫星故障,将可能造成严重损失。地面诊断系统作为卫星地面服务系统的重要组成部分,能够根据卫星的遥测数据诊断卫星当前的健康状态,自动发现并报告故障,及时将影响降到最小。
目前,针对卫星的在轨故障诊断问题,国内外提出了诸多诊断算法和系统构建方案。文献[1]研究了基于统计方法的诊断问题,但统计方法需要大量的历史经验数据,在实际故障数据缺乏或者参数变化范围较大的情况下难以实现准确诊断。文献[2-5]应用基于模型的方法,对卫星的姿态控制系统进行故障诊断,这类方法利用解析冗余代替硬件冗余实现故障诊断,但卫星是一个复杂的耦合系统,其他系统的状态或者人工操作指令都会造成模型的改变,单独考虑某一个系统建立的模型难以适用于卫星整个生命周期。文献[6-9]使用支持向量机(SVM)、神经网络、分形等基于数据分析的智能方法,实现了卫星的故障诊断,这类机器学习的方法不依赖于模型,仅通过对样本的学习自主提取出故障数据的特征,是故障诊断技术发展的新方向。不过,机器学习方法有时无法很好实现对系统固有变化规律的学习,容易造成过学习或者误诊断。文献[10]针对导航卫星设计了一套故障诊断演示验证方案,但该方案主要解决算法的有效性验证问题,无法实现长期无人值守运行。
本文提出了一种应用整星模拟器与机器学习相结合的卫星在轨故障诊断方法。该方法具有诊断准确、抗干扰能力强等特点。基于此方法,提出了一套系统设计方案,并给出了实例,可证明所提出的故障诊断方法和系统设计方案是可行、有效的。
2 卫星在轨故障地面诊断方法
2.1总体思路
地面系统了解卫星当前状态的唯一途径是通过卫星的遥测。遥测信息中有一部分是能够用数学模型进行描述的规律部分,剩下的是无法建模或描述的部分。地面系统对卫星的状态诊断应充分利用目前已知的规律信息。这些规律信息包括静态的规律信息(如阈值规则和数据的统计规律),以及随系统状态变化的动态规律信息(如已知的模型)。故障诊断应在当前遥测值的基础上,滤除系统固有的变化规律,再进行故障的分析与判断,以避免对正常规律部分的误判断。
本文提出的诊断方法总体思路(见图1)是:建立与在轨卫星同步运行的整星模拟器,然后利用遥测数据减去模拟器输出的遥测值形成残差。如果残差超过对应的阈值,说明检测出卫星发生了故障,再使用故障诊断算法对残差进行诊断。
用于地面预测的遥测数据由两部分构成:一部分来自数学建模方法建立的数学模型,另一部分是来自机器学习方法建立的机器模型。数学模型只能在一定的精度范围内逼近实际的物理过程,对于无法建模的部分,可以使用机器学习方法来逼近,通过机器学习形成机器模型,进一步提高预测的精度。
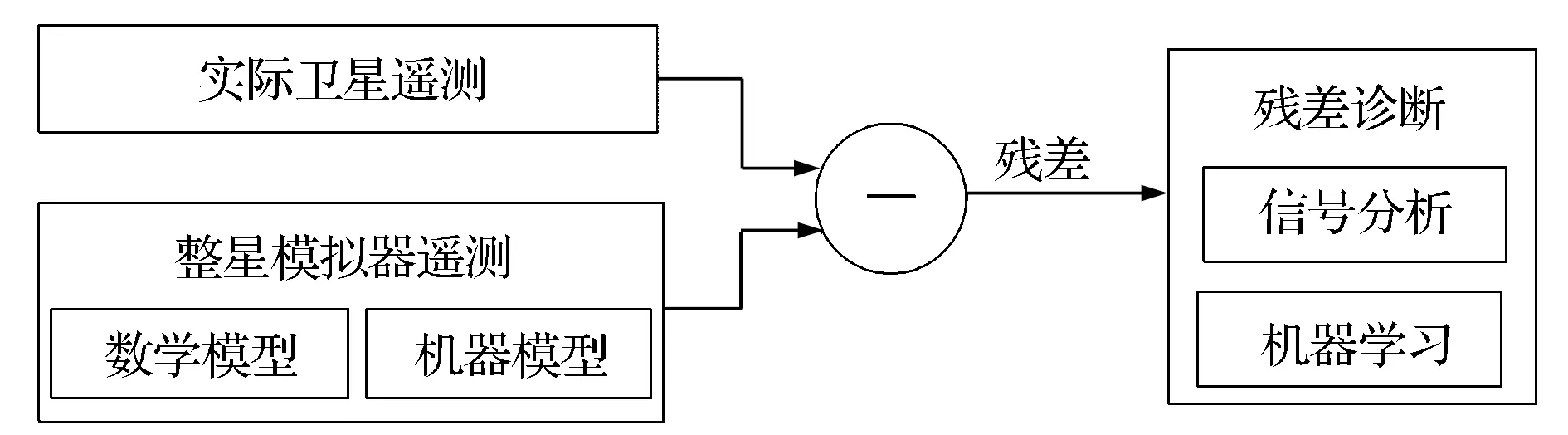
图1 故障诊断方法总体思路
2.2整星模拟器的建立
卫星是一个复杂系统,其组成部分间是有耦合关系的。以姿态轨道控制系统为例,它作为卫星平台的基本系统之一,与推进、遥测遥控、电源等其他系统存在耦合性。推进系统的主要部件推力器担负着卫星姿态和轨道的保持、机动等功能,同时也可看作姿态轨道控制系统执行机构的一部分。姿态轨道控制系统与测控数传系统的耦合性,体现在大型可展开天线指向控制等方面。姿态轨道控制系统与电源系统的耦合性,体现在太阳电池阵遮挡控制等方面,卫星各系统的耦合关系如图2所示。
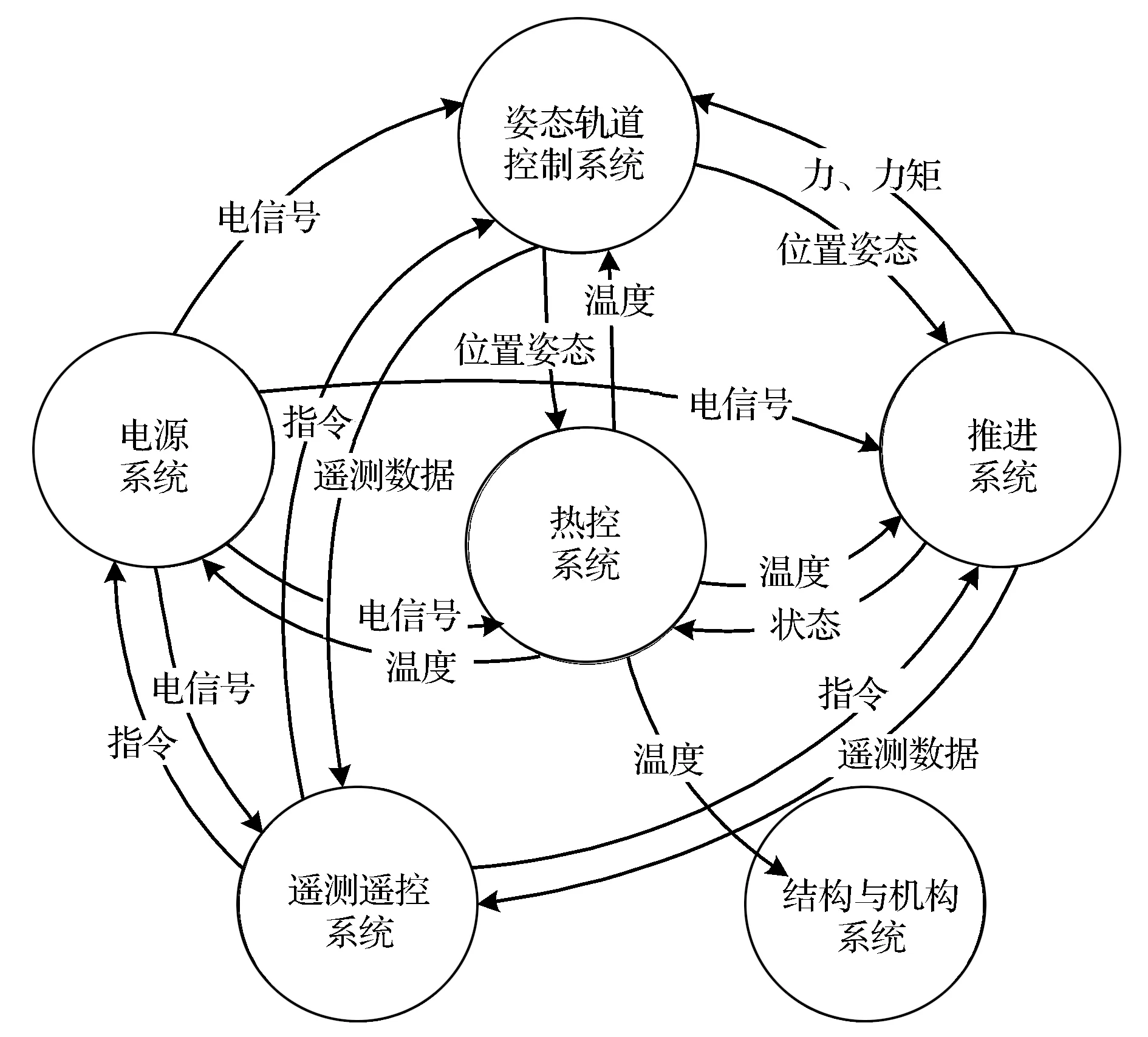
图2 卫星各系统的耦合关系
要对卫星的当前状态进行准确的动态估计,须在考虑卫星各系统间耦合关系的基础上,建立整星模拟器。模拟器与在轨卫星同步运行,卫星飞行过程中会受到地面遥控指令干预,遥控指令发给卫星的同时,也发送给整星模拟器,模拟器接收并解析遥控指令,作出与实际卫星一致的响应。在正常情况下,模拟器输出的遥测数据与实际卫星保持一致。
整星模拟器主要由卫星各系统与部件模型及卫星运行环境模型组成。卫星各系统与部件模型包括姿态轨道控制系统模型、推进系统模型、电源系统模型、测控数传系统模型、热控系统模型、综合电子系统模型和有效载荷模型。卫星运行环境模型包括动力学环境模型、热力学环境模型和空间链路模型。在建立整星模拟器时,须根据实际的工程技术条件考虑测轨精度、卫星各部件的工作精度及模型的平滑处理等。卫星运行环境的模拟须考虑地球的非球形因素、重力场的不均匀性和地磁场的扰动等。整星模拟器的各部件要在统一的基准下进行仿真。
2.3模型修正
卫星故障诊断的效果取决于整星模拟器对当前状态的估计精度。通过数据挖掘技术,可以对模型进行迭代修正,提高预测精度。模型修正分为两个步骤:一是尽可能修正数学模型;二是利用机器学习方法,对无法建模的部分进行学习,形成机器模型。模型修正的方法如图3所示。
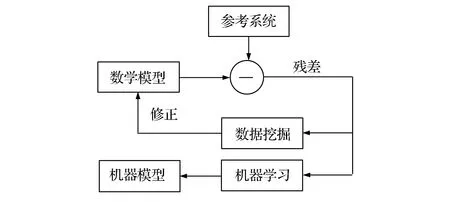
图3 模型修正方法
数学模型的预测值与参考系统输出值形成残差,利用数据挖掘方法提取残差中能够用数学方法描述的部分,作为模型的修正项添加到系统的数学模型中。修正后再形成新的残差,利用新的残差进行数据挖掘,如此迭代,直到残差小于预设精度或无法再提取出能够用数学方法描述的部分。残差中无法用数学方法描述的部分,通过机器学习方法(如神经网络、支持向量机等)形成机器模型,作为计算机的知识存储到系统中。地面预测时,将修正后的数学模型与机器模型之和作为预测的结果。
机器学习安排在建好整星模拟器以后的模型修正阶段,即通过数据挖掘方法已无法再提高数学模型精度时,利用机器学习方法对残差进行分析建模,形成机器模型。
根据参考系统的不同,模型可进行三种不同程度的修正:第一种是利用其他数字化仿真结果进行修正;第二种是利用研制中的测试测量数据进行修正;第三种是利用运行中的遥测数据进行修正。
2.4残差诊断
对卫星的故障诊断分为两个步骤:一是确定系统是否发生了故障,二是确定系统发生了什么故障。第一步,通过实际遥测值与地面预测的正确值对比实现,如果二者的残差大于一定的程度,说明实际系统已经偏离正常状态运行,进入故障状态。第二步,通过对残差的特性分析,确定残差处于哪种故障模式。残差的特性分析要建立一套诊断算法库,针对不同的诊断对象选择适用的诊断算法;也可以根据需要调用多种算法对同一遥测信息进行诊断,然后将多种诊断算法的结果进行融合,避免单一诊断算法不完备造成的漏诊断与误诊断。
诊断算法库中的算法分为基于信号分析的方法和基于机器学习的方法。
信号分析方法包括阈值分析、均值分析、方差分析、频谱分析和小波分析等。它对残差信号进行特征提取,然后将提取出来的特征量与历史经验值进行比较,根据预设的故障判断规则形成诊断结果。例如,设定某几个遥测数据残差的特征量与经验值的差异超过一定的阈值范围时,就确诊为系统进入了该种故障模式。信号分析方法需要设计人员根据经验建立一定的规则,但由于遥测数据已经与预测模型作差,滤掉了大部分固有规律部分,因此,残差特征提取以后的规律将变得简单,并且能够准确反映故障特征。
机器学习方法包括支持向量机、神经网络、聚类分析、决策树和马田系统等。其特点是直接对残差样本数据进行学习,无需人为去总结或者描述故障判断的规则。该方法根据不同样本数据本身的差异特性进行数据分类,通过对样本的学习训练形成计算机能够识别的故障特征文件,再将新的数据根据这些特征进行分类,形成诊断信息。机器学习方法可以学习并描述一些用规则难以描述的特征,也避免了人工对故障规则描述不准确造成的错误。残差诊断阶段的机器学习,安排在诊断算法训练阶段,当获得了已知故障模式的残差数据以后,通过机器学习对残差的类型进行有监督的学习,生成故障特征文件。
2.5故障样本的产生
地面诊断系统测试以及机器学习方法训练时都需要大量的故障样本数据。卫星本身的可靠性高,故障的概率极低,即使出现了故障,由于卫星的冗余备份,很快又会用备份部件修复,因此故障样本极难获取。通过仿真的方法,可以解决样本缺乏的问题。
在已经建立的动态仿真模型基础上,根据卫星设计时的故障预案和历史故障经验建立部件的故障模型,再通过故障注入的方式将仿真模型切换到对应故障模式运行,这样系统就能够动态产生故障时的遥测信息。
故障注入模块将卫星各系统可能出现的故障进行编码,然后传送给整星模拟器,整星模拟器收到故障代码后启动对应的故障模型。故障代码包括卫星的编号、故障的部件编号、故障模式和故障参数信息。
卫星的各系统间是有耦合关系的,某些部件的故障将会对其他系统产生耦合。整星模拟器使用了包含卫星各系统耦合关系的仿真模型,这种方式能够模拟出耦合故障情况下的遥测输出。
3 系统的设计与实现
3.1系统的结构设计
卫星在轨故障地面诊断系统由遥测接口程序、整星模拟器、残差诊断程序、诊断调度程序、相关数据库和配套工具组成。系统结构如图4所示。
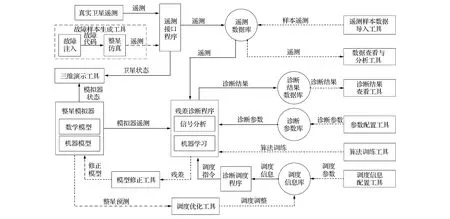
图4 地面诊断系统结构框图
(1)遥测接口程序接收遥测信息,并将其解析后按照系统预定的格式存入遥测数据库中。系统可以接收真实卫星的遥测数据,也可以接收故障样本生成工具产生的遥测数据,以便对算法进行训练和测试。
(2)整星模拟器是包含卫星各系统耦合关系的仿真程序。模拟器与实际卫星同步运行,能够对卫星当前状态进行正确估计,其输出作为残差诊断程序诊断的依据。整星模拟器的模型包含修正后的数学模型和机器学习产生的机器模型。
(3)残差诊断程序根据卫星遥测和模拟器遥测的残差进行故障诊断。它是所有故障诊断算法的集合,受控于诊断调度程序,根据调度指令调用相应的诊断算法,从诊断参数库中提取对应的诊断参数以完成诊断,并将诊断的结果写入诊断结果数据库中。
(4)诊断调度程序控制残差诊断程序的运行。它根据调度信息库中预先制定的计划安排,发送调度指令给残差诊断程序。调度指令包括诊断时间段、诊断算法和所需参数编号等信息。诊断调度程序的调度计划支持两个级别的计划:一是由人工通过调度信息配置工具在数据库中编制计划任务,然后系统按照时间顺序逐步执行,这样可以实现简单的自动化运行;二是根据整星模拟器对卫星当前状态的预测以及当前任务对设备监测的紧迫性需求,调度优化工具利用遗传编程方法和计算智能技术自主规划与优化调度计划。
(5)相关数据库是卫星故障诊断程序的数据枢纽,包括用于存储卫星遥测数据的遥测数据库,存储诊断算法中所需参数的诊断参数库,存储诊断结果的诊断结果数据库,以及存储调度信息的调度信息库等。
(6)配套工具是地面诊断系统进行数据处理与分析的工具,供技术人员进行数据分析和故障确认。配套工具及其对应的功能如表1所示。
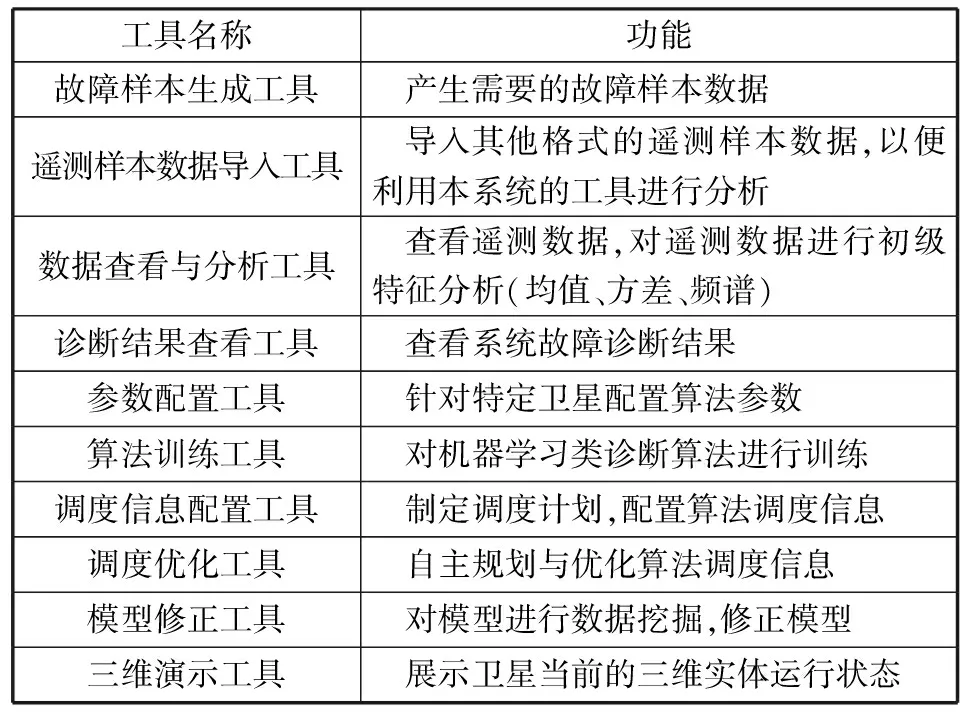
表1 系统配套工具
3.2诊断算法参数化设计
对不同的卫星,使用的诊断算法基本是一致的,不同的只是算法的参数,或者算法需要的特征文件。将算法和所需的参数分离设计,可以使算法变得通用,便于卫星数量的扩展和算法数量的扩展。因此,应建立故障诊断算法库,将算法所需参数存入数据库或者文件中。在故障诊断算法库中,每种算法的输入是诊断调度指令和遥测数据,输出是将结果写入数据库。不同的算法间是没有耦合关系的,可以独立调试、修改或者追加。对于新增算法,只需在调
度信息库中追加新算法的调用信息,不会影响系统的其他部分。对于新增卫星,只需新增与之相应的参数。可见,诊断算法的参数化设计使系统能够支持诊断算法的扩展和卫星数量的扩展。
诊断算法的参数化要考虑卫星间设备参数的继承性。对于某些部件,可能在多种卫星上都使用,相同部件的参数或者故障特性可能是一致的,这样就可以直接将参数库中的数据直接引用过来,从而缩短研究和验证的周期。加入的新卫星,也只要追加少量新设备的故障参数特性即可。
3.3系统运行实例
根据以上系统设计思路,本文建成了一套卫星故障地面诊断系统样机。以某导航卫星为原型,建立了整星的仿真模型。该模型能够对卫星各部件注入预设的故障,动态生成故障状态下的遥测数据。系统在调度程序的控制下,能够应用多种算法对遥测数据和整星模拟器的残差进行故障诊断。以X轴动量轮摩擦力矩增大故障为例,说明系统的工作过程。
正常情况下,卫星能够与整星模拟器同步运行,输出一致的遥测数据,整星模拟器运行效果如图5所示。第21 s时,给卫星的X轴动量轮注入摩擦力矩增大的故障,故障前后动量轮的转速、轴温、电流的变化情况如图6所示。可以看到,从22 s开始,由于摩擦力矩增大,转速出现了下降,轴温升高,电流增大。调用支持向量机算法对卫星遥测数据和整星模拟器数据形成的残差进行诊断,诊断结果如图7所示。系统准确诊断出了在22 s时发生了X轴动量轮摩擦力矩增大的故障。
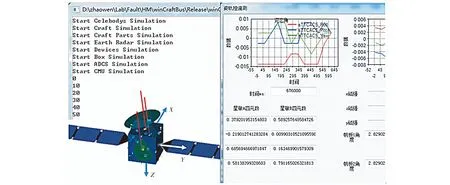
图5 系统运行效果
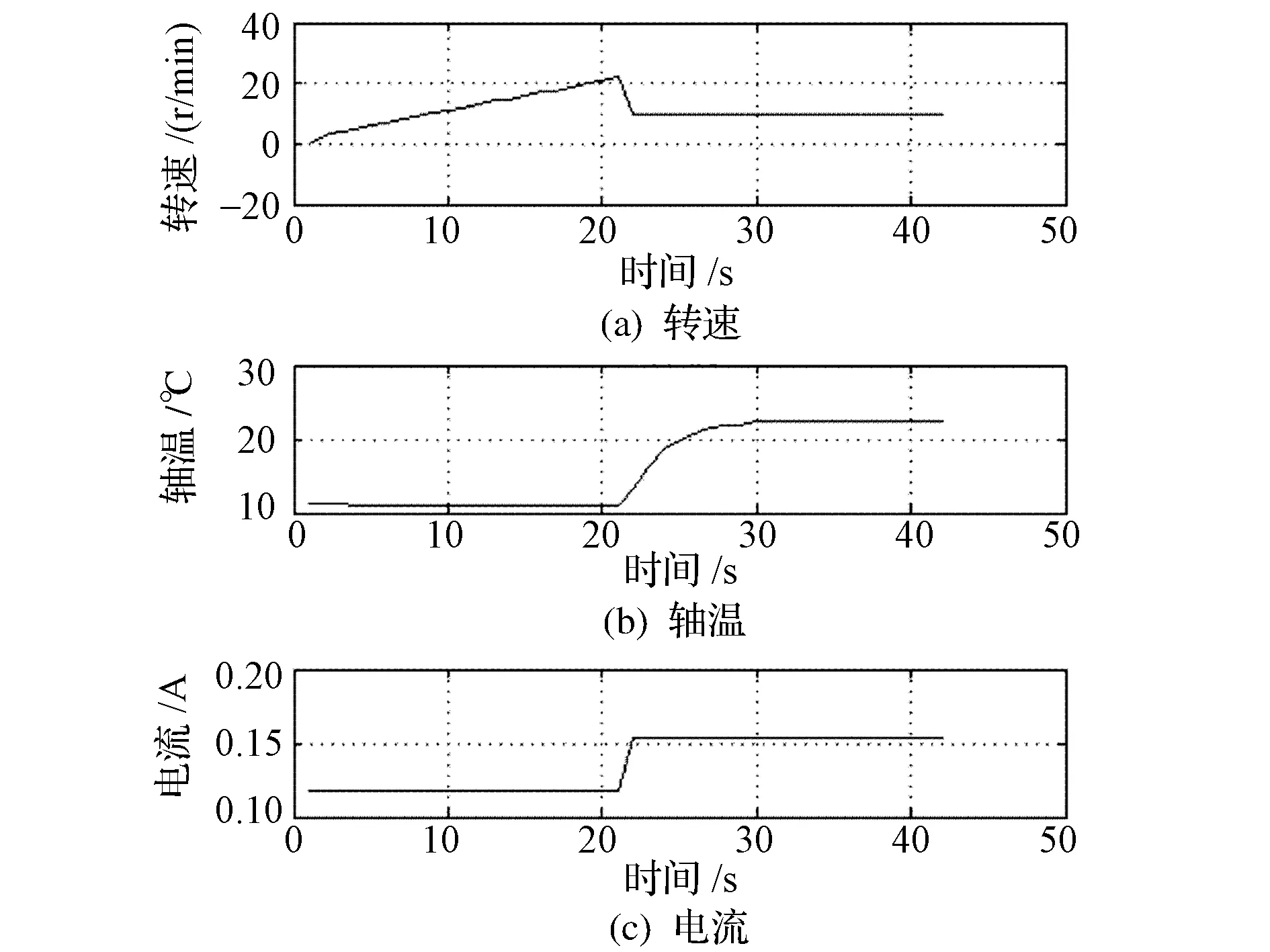
图6 X轴动量轮遥测数据
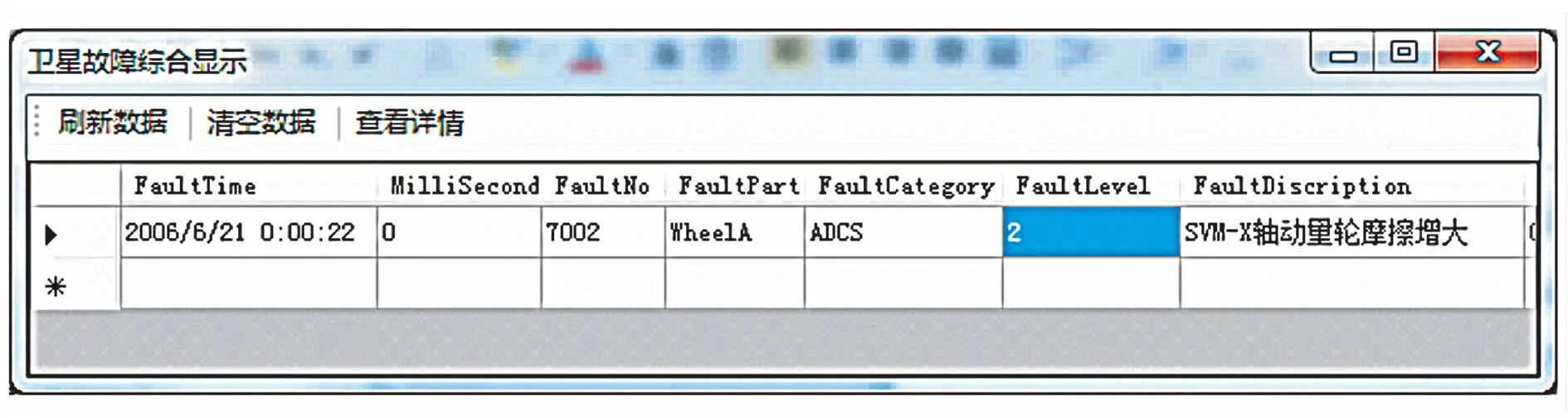
图7 诊断结果显示
4 结论
本文提出了一种应用整星模拟器的卫星在轨故障地面诊断系统设计,并给出实例验证了设计方案的可行性,得出主要结论如下。
(1)建立包含各系统耦合关系的整星模拟器,获得卫星遥测与模拟器预测值形成的残差,再运用故障诊断算法进行诊断处理。
(2)利用数据挖掘方法迭代修正整星模拟器的数学模型,无法用数学模型描述的部分通过机器学习方法变成机器模型加入到整星模拟器中,提高模拟器的预测精度。
(3)诊断算法和相关参数应分离设计,使系统能够支持卫星的扩展、算法的扩展,以及诊断参数的继承。
(4)对整星模拟器注入所需的故障代码数据,使卫星的相应部件进入故障模式运行,产生故障样本数据,这样可解决故障样本缺乏的问题。
目前,本文设计的系统已在仿真层面得到验证,不过使用的模型与参数并未针对具体的卫星,在后续研究中,将针对工程应用优化相关设计参数,使系统更具针对性与实用性。
References)
[1]赵海涛. 卫星在轨故障数据的统计分析方法与应用[J]. 质量与可靠性,2010(6):43-46
Zhao Haitao. Statistical analyis method and application of satellite on-orbit fault data[J]. Quality and Reliability, 2010(6): 43-46 (in Chinese)
[2]Talebi H A, Patel R V, Khorasani K. Fault detection and isolation for uncertain nonlinear systems with application to a satellite reaction wheel actuator[C]//Proceedings of IEEE International Conference on Systems, Man and Cybernetics, 2007. ISIC. New York: IEEE, 2007: 3140-3145
[3]Barua A, Khorasani K. Intelligent model-based hierarchical fault diagnosis for satellite formations[C]//Proceedings of IEEE International Conference on Systems, Man and Cybernetics, 2007. ISIC. New York:IEEE, 2007: 3191-3196
[4]Tudoroiu N, Khorasani K. Fault detection and diagnosis for satellite’s attitude control system (ACS) using an interactive multiple model (IMM) approach[C]//Proceedings of 2005 IEEE Conference on Control Applications, 2005. CCA. New York:IEEE, 2005: 1287-1292
[5]Wang Y, Ma G, Li C. Fault diagnosis using cascade H∞ observers with application to spacecraft attitude control[C]//Proceedings of 2010 the 5th IEEE Conference on Industrial Electronics and Applications (ICIEA). New York:IEEE, 2010: 1976-1981
[6]安若铭,秦振汉,姜兴渭.神经网络专家系统在姿控系统诊断中的应用[J].中国空间科学技术,2009,29(3):71-77
An Ruoming, Qin Zhenhan, Jiang Xingwei. Application of neural network-expert system for fault diagnosis of satellite attitude control system[J]. Chinese Space Science and Technology, 2009,29(3):71-77 (in Chinese)
[7]胡迪,董云峰.基于RVM回归的姿控系统多故障检测[J].电机与控制学报,2011,15(9):68-73
Hu Di, Dong Yunfeng. Multi-fault detection for attitude control system based on RVM regression [J]. Electric Machines and Control, 2011,15(9): 68-73 (in Chinese)
[8]Talebi H A, Khorasani K, Tafazoli S. A recurrent neural-network-based sensor and actuator fault detection and isolation for nonlinear systems with application to the satellite’s attitude control subsystem[J]. IEEE Transactions on Neural Networks, 2009, 20(1): 45-60
[9]Hu D, Sarosh A, Dong Y F. A novel KFCM based fault diagnosis method for unknown faults in satellite reaction wheels[J]. ISA transactions, 2012, 51(2):309-316
[10]潘宇倩,张弓,白东炜,等.卫星健康管理故障诊断算法的设计及其实现[J].航天器工程,2011,20(5):37-42
Pan Yuqian, Zhang Gong, Bai Dongwei, et al. Design and implementation of fault diagnosis algorithm for satellite health management [J]. Spacecraft Engineering, 2011,20(5): 37-42 (in Chinese)
(编辑:夏光)
Design of Ground Diagnosis System for Satellite In-orbit Fault
ZHAO Wen DONG Yunfeng
(School of Astronautics, Beihang University, Beijing 100191, China)
To solve the satellite in-orbit fault diagnosis problem, a fault diagnosis method and system design proposal are proposed. In the diagnosis method, a whole satellite simulator is established with every subsystems coupled, and the satellite telemetry and simulator predict value are subtracted to form residuals, the known dynamic regulation contained in the telemetry is removed, the diagnosis threshold is reduced and the fault detecting accuracy is improved. The signal analysis methods and machine learning methods are used to diagnose the residuals. Diagnosis system consists of telemetry interface program, whole satellite simulator, residuals diagnosis program, databases and relative tools. A design proposal of satellite fault ground diagnosis system consists of system structure design and parameterized algorithm design, and then a demonstration system is established to verify this proposal. The operation results indicate that the method and design proposal are practicable and effective.
satellite fault diagnosis; whole satellite simulator; complex system; residual diagnosis
2013-05-31;
:2013-08-14
赵文,男,博士研究生,研究方向为卫星故障诊断与智能计算。zhaowen@sa.buaa.edu.cn。
TP277
:ADOI:10.3969/j.issn.1673-8748.2014.03.017
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
故事作文·高年级(2021年4期)2021-05-06 03:20:04
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
电子制作(2019年11期)2019-07-04 00:34:40
电子测试(2018年13期)2018-09-26 03:30:00
太空探索(2016年3期)2016-07-12 09:58:35
太空探索(2016年1期)2016-07-12 09:56:05
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
装备环境工程(2015年5期)2015-02-28 01:20:24
航天器工程(2014年2期)2014-03-11 16:35:24