
侧推装置推力减额研究
2014-07-18 11:51李齐垚
船舶 2014年4期
李齐垚
(海军驻广州427厂军事代表室 广州510715)
侧推装置推力减额研究
李齐垚
(海军驻广州427厂军事代表室 广州510715)
回顾了推进器水动力干扰的研究概况,开展了单侧推装置在不同流速、流向下的推力减额的试验研究和CFD计算,分析了多侧推装置下推力减额的变化规律和侧推装置间距对推力减额的影响。研究成果可为侧推装置的布置以及改进侧推器槽道进出口形式提供参考。
侧推装置;推力减额;水动力干扰;海流流速流向
引 言
目前有多种形式的推力装置应用在动力定位船上,其中包括普通的推进器、导管推进器和直翼式推进器。有些推进器安装在船上,其推力轴相对于船舶是固定的;有些推进器则可以伸出船底,其推力轴可360°旋转。
当船舶在水流中保持定位或在静水中运动时,在推力器和主推进器的作用下,作用于船体上的力和转动力矩不再是单独运转时的简单作用力,这是由于干扰将引起船体上的作用力和力矩大于或小于推力器单独运转时的作用力或力矩。此外,在某些方位下,一个推进器的螺旋桨尾流将进入另一个推进器,并影响下游推进器的性能。
1 推进器水动力干扰研究概况
1.1 推进器对船体的影响
由于船体形式和推进器方向的不同,推进器对船体的干扰影响非常复杂,在实际设计中需要考虑的干扰有以下几种:
(1)摩擦力
当螺旋桨安装在船体平坦底部时,螺旋桨将贴近船底表面,产生与推力方向相反的摩擦力,导致推力减额。
(2)科安达(Coanda)效应
船体表面为曲面时,螺旋桨尾流会沿着曲面扩散(如舭部连接处),并在曲面附近形成低压区域,造成压差阻力,从而抵消部分推力,这时有效推力将会减少,这就是科安达效应。
1.2 推进器之间的相互干扰
采用多个推进器时,特别当两个推进器的方向接近一条直线时,一个推进器排出的水流会直接冲入另一个推进器。
很多拖曳水池都曾对螺旋桨间的干扰进行过试验研究,尽管采用不同的螺旋桨,但结果都非常相似。Lehn[1]和Moberg[2]对两个螺旋桨呈前后布置的形式进行了试验,试验结果表明:当两个螺旋桨距离越靠近,干扰问题就越严重,尾流会在相当大的范围内对下游螺旋桨产生影响,在16倍直径距离处,推力损失仍达1/4左右。当螺旋桨置于平板下时,螺旋桨尾流的最大速度偏向平板,从而降低下游推力器的平均入流速度,并减少推力损失。当上游螺旋桨改变角度或距离以避免其尾流对下游螺旋桨的直接冲击,干扰问题可以得到改善,Nienhuis[3]和Lehn的试验结果都证明了这点,他们对不同角度和不同距离进行了试验,试验结果表明:改变角度能够大大改善推力损失,尤其是当两桨之间距离较大时。
2 侧推装置推力减额试验研究
2.1 概 述
舰船动力定位时,侧推器受到海流的影响,当海流的流速和流向不同时,侧推器产生的推力与其在静水中的推力不同。为了正确估算所需侧推装置功率的大小,需确定侧推器受不同流速、流向影响时的推力减额。经查阅国内外资料,未见相关侧推装置在不同流速、流向下推力减额的研究成果。
在上海交通大学海洋工程国家重点实验室进行了侧推装置推力减缩试验研究[4],研究方案为:制作相应比例的船模和侧推螺旋桨,将侧推器固定安装在船模的隧道中,侧推器由电动机驱动。将船模固定在拖车上,通过改变船模与拖车的角度以及拖车的速度,来模拟不同的流速和流向。首先测量侧推器全负荷工况下在静水中的推力和扭矩,并以达到要求推力时的转速为额定转速。然后测量不同流速和流向下推力器全负荷(额定转速)工况下的推力和扭矩,以确定侧推器在不同流速流向时的推力减缩系数。
在本次模型试验中,试验和分析所采用的随船坐标系O-XYZ如图1所示。随船坐标系的原点位于船模的中心处。图中箭头表示试验中的来流方向。来流方向由船首自0°开始沿逆时针方向,共360°。安装在隧道中的螺旋桨安放在船的中纵剖面的位置上,叶面朝向左舷,故螺旋桨所受的推力方向指向右舷。

图1 试验所用的坐标系
2.2 侧推系统和船舶模型概述
试验用螺旋桨模型的大小为D = 0.12 m,而实船的螺旋桨的尺寸为2.1 m,故采用的实船模型缩尺比为17.5。所有的模型均按照该缩尺比制作。
Z 型侧推系统主要由螺旋桨、动力部件、测力部件等组装完成。其基本部件组成见下页图2。
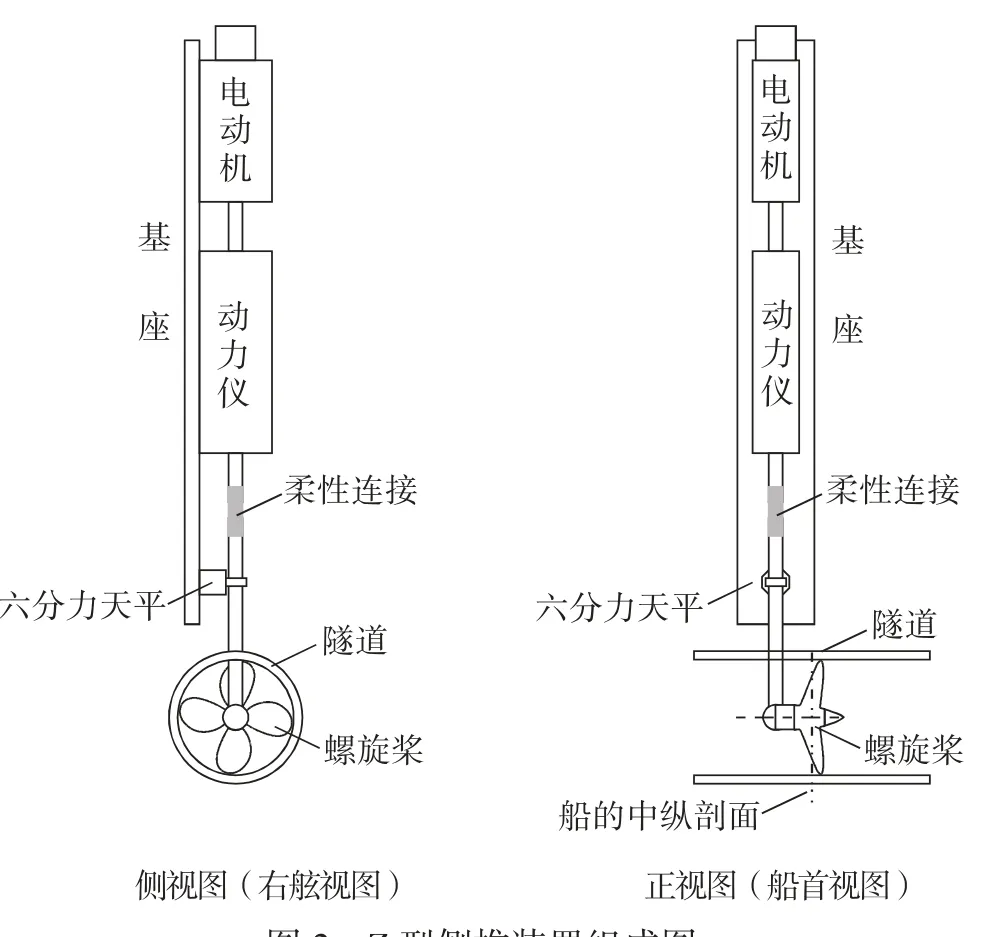
图2 Z型侧推装置组成图
侧推装置额定推力不小于150 kN(即1 000 kW ×0.15 kN/kW),螺旋桨直径D 为 2 100 mm。试验时,从备用桨中选取螺旋桨AU4作为试验用桨。该桨的直径D为 120 mm(相应的模型缩尺比为 2 100/120=17.5),螺距比(H / D) 为0.75,盘面比(A / Ad)为0.6。
侧推系统由1台稀土直流电机驱动。电动机最大功率250 W、输入电压90 V、最高转速1 500 r/min、最大扭矩1.67 N·m、最大电流3.7 A,直流电机的转速由数字转速表控制,控制精度为±1.0 r/min。
由于侧推系统采用Z型齿轮传动,故无法直接采用自航动力仪来测量推力,因此试验中仅用自航动力仪测量扭矩,而由固定螺旋桨垂向传动轴的测力天平来测量螺旋桨上的推力。在自航仪和螺旋桨的传动轴之间采用柔性连接结合。这样既可以将自航仪的扭矩传递到螺旋桨上驱动螺旋桨的转动,同时避免将螺旋桨的推力传递到自航动力仪上,使螺旋桨的推力完全施加在测力天平上,从而保证螺旋桨推力的正确测量。
自航仪最大测量扭矩±147 N·cm,推力和扭矩短时过载25%,最大转速1 500 r/min。测力天平的量程为98 N。试验模型完全依照型线图数据木制,并满足相应的精度。其吃水通过添加和改变船模内压载的质量和位置进行调整,以达到规定的要求。船首部的侧推孔隧道采用厚壁有机玻璃管制作,隧道内表面经过精车加工。
2.3 (无桨)背景流速下,船模隧道内的流速测量
当船模遭遇不同流向和流速的来流时,测量其在隧道内的流速。采用叶轮式流速计测量隧道内的流速。叶轮式流速计呈圆柱状,直径约6 mm、长约5 mm,流速计的测量位置距螺旋桨中轴线R / 2(R为螺旋桨半径),距离船舶的中纵剖面4.0 cm(相当于实船0.7 m),位于螺旋桨的叶背一侧处。隧道内流速测量的结果见表1和图3。

表1 (无桨)不同背景流速下,船模隧道内的流速测量结果
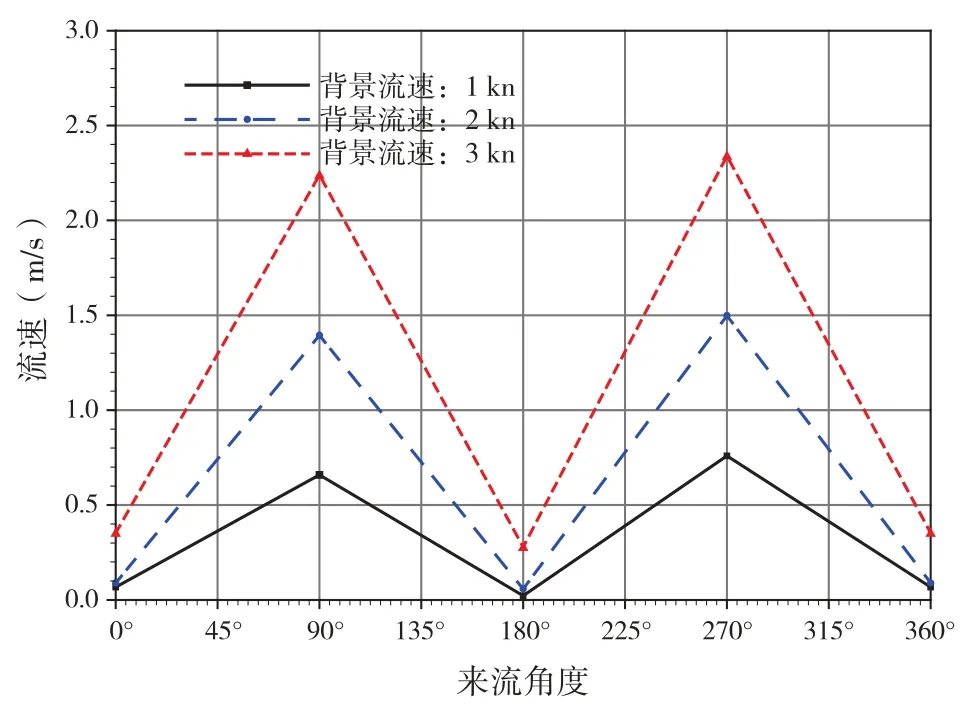
图3 (无桨)隧道内,不同来流角度和流速作用下的桨前流速
从表1可以看出,当来流方向为0°和180°(即艏部或艉部来流)时,隧道内流速较小;当背景流速达到3 kn(1.543 2 m/s)时,隧道内流速最高才0.348 m/s,仅为背景流速的22.55%;而当来流方向为90°和270°时,隧道内流速明显大于外界背景流速,尤其来流方向为270°、背景流速3 kn时,隧道内的流速比外界流速高51.31%。
2.4 (有桨)背景流速下,船模隧道内流速的测量
当安装螺旋桨的船模遭遇不同流向和流速的来流时,测量其在隧道内流速,流速计的测量位置同前。由于考虑到在叶片的后面和叶片间隙的后面测量的流速会有所不同,因此分别进行了以上两个位置的流速测量,流速测量的结果见表2和图4。

表2 (有桨,n=0)不同背景流速下,船模隧道内的流速测量结果
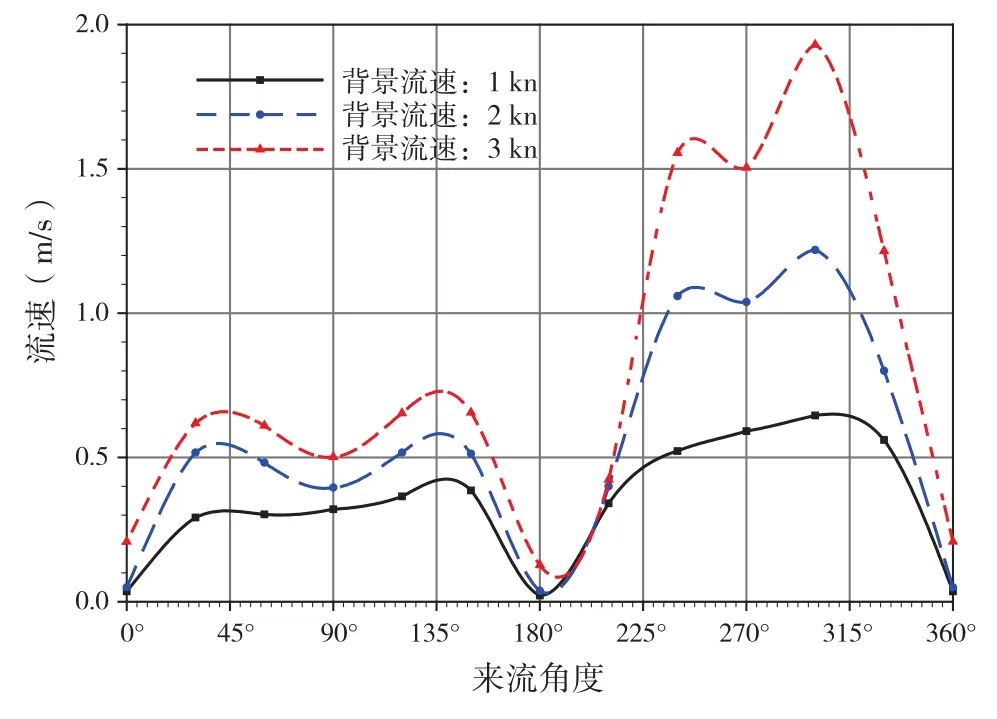
图4 (有桨)隧道内,不同来流角度和流速作用下的桨前平均流速
从表2可以看出,当隧道内有桨(n = 0)时,隧道中的流速小于无桨时隧道内流速。当来流经由桨背流入(顺流)时,桨前的流速比较均匀,桨叶和桨隙的流速相差不大;而当来流经由桨面流入(逆流)时,桨前的流速比较紊乱,位于桨前(桨背)处的桨叶和桨隙的流速相差比较大,显示流经过桨后比较紊乱,分布不再均匀了。
2.5 全负荷工况下的试验测量
测量当安装螺旋桨的船模在静水中和遭遇不同流向和流速的来流时,侧推装置全负荷运转(转速为1 220 r/min)时,螺旋桨推力和扭矩变化。
经过试验测得,该侧推系统(n = 1 220 r/min)在静水中的敞水推力为27.773 N(模型值),扭矩为36.995 N·cm(模型值),换算到实船为152.57 kN,35.56 kN·m。
安装到隧道内以后,该侧推系统(n = 1 220 r/min)在静水中的推力为20.54 N(模型值),扭矩为29.321 N·cm(模型值),换算到实船为112.838 kN,28.19 kN·m。可见,安装到隧道内以后,螺旋桨在相同转速下的推力、扭矩和功率都有所下降。
在不同流向和流速的来流中,相同转速(n = 1 220 r/min)的螺旋桨的推力和扭矩见表3和图5中所示。 从图表可以看出:
(1)螺旋桨在安装到隧道内后,相同转速时推力和扭矩都有所下降。
(2)除了个别角度,推力和扭矩都随来流流速的上升而下降。
(3)当来流改变时,推力的变化比扭矩的变化更大。
(4)当来流在180°~360°间变化时(此时水流从叶背流入,即顺流),推力和扭矩随流向而变化,但比较缓和。
(5)当来流在 0°~180°间变化时(此时水流从叶面流入,即逆流),推力和扭矩随流向变化比较剧烈;在90°~180°间,推力下降比较明显(此时的水流由船尾左舷流入)。

图5 同转速(n =1 220 r/min)时,螺旋桨推力随来流不同而变化

表3 不同背景流速下,螺旋桨推力和扭矩测量结果
3 多侧推装置推力减额CFD研究
3.1 概 述
如果船首部有多台侧推装置时,在海流以同一流速、流向作用于船体时,由于3台侧推器距离较近,会产生相互干扰,隧道内进流速度不同,3台侧推器发出的推力也会不同。[5]
本文以单隧道侧推力器的试验数据为基础,通过目前世界上广泛应用的CFD流体力学软件Fluent,进行三隧道侧推器联合工作的水动力性能分析,通过计算给出三隧道侧推器在不同流速、不同流向时推力和扭距的变化规律,为动力定位系统提供有用的数据资料。
3.2 螺旋桨敞水性能计算
螺旋桨敞水计算的模型为AU4,直径D为2 100 mm,螺距比(H / D)为0.75,盘面比(A /Ad)为 0.6,与侧推装置推力减缩试验研究相同。计算采用Fluent软件的Segregated求解器。由于在后面的槽道桨计算中有反向来流工况(例如来流方向在0°~180°之间),因此本文计算了螺旋桨在负进速系数时的性能(见图6)。

图6 螺旋桨性能计算结果
在图6中,除了画出计算结果外,也画出了实验结果。图中曲线计算值未作修正处理。可以看出,计算结果在进速系数等于0附近误差大一些,计算结果偏小;在J>0.2以后计算结果与实验值吻合较好。计算结果中扭矩偏大,这可能是因为计算采取粘性流体计算,桨建模与试验模型不同所致。
分析计算值和实验值,找出误差规律大约是进速系数的2次方函数,在J>0时用下式对计算结果进行修正后,可获得非常好的结果(见图7)。

图7 计算结果经修正后的曲线图
推力系数修正
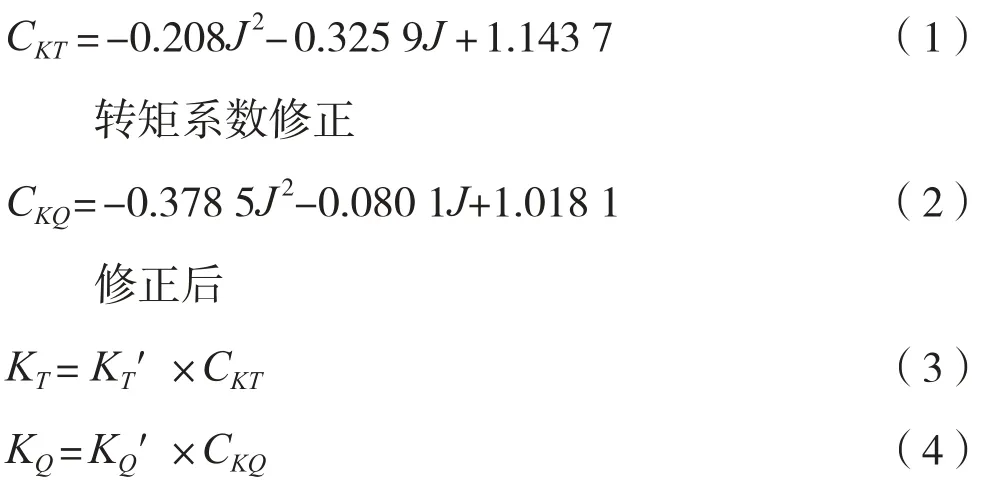
计算修正的目的在于了解引起计算误差的原因和规律,找出相关因素,供后期CFD计算参考。
3.3 单隧道侧推器推力减缩计算
单隧道侧推力器推力减缩计算包括:隧道内流速计算、螺旋桨推力计算和船体水动力计算3个部分,来流速度有1 kn、2 kn、3 kn,流向0°~360 °。隧道位置在舯前51.45 m且距基线2.4 m处,计算坐标系与试验相同。
3.3.1 单隧道无桨时的隧道内流速计算
为了验证计算值与实验值的符合情况。流速测量位置在隧道内距螺旋桨中轴线R / 2(R 为螺旋桨半径),距离船舶的中纵剖面0.7 m,位于螺旋桨的叶背一侧处,取圆周均布4点的轴向速度平均值。图8是实验值和计算值的比较。
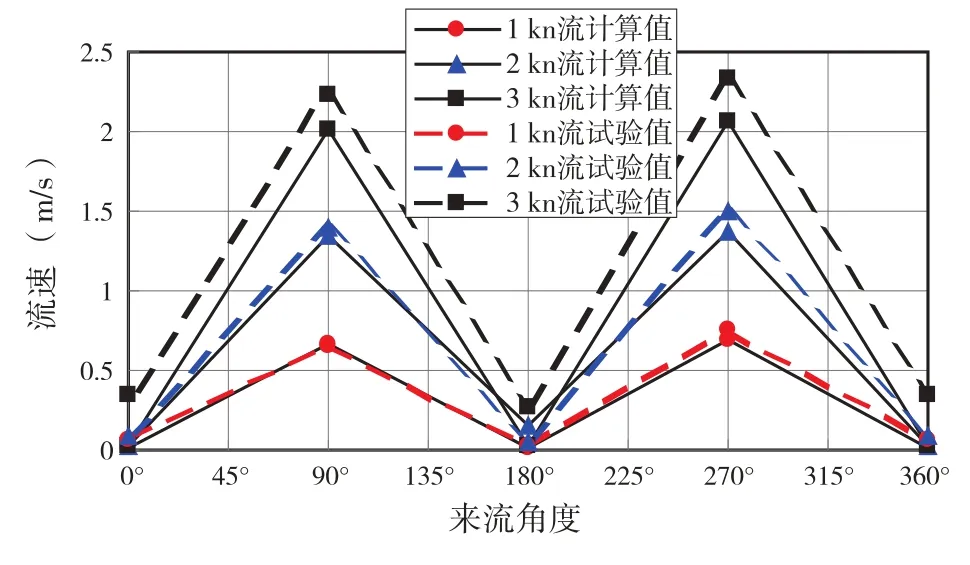
图8 隧道内流速的计算结果与实验结果的比较
可见,计算值比实验值偏小,但变化规律相同。本文认为主要原因在于计算时采取的是在桨前R / 2半径处沿周向均布4点的轴向流速计算的平均值,而试验时采用旋桨流速仪进行测量,隧道内可能产生的周向速度会对流速仪桨叶产生作用,使测量值偏大。此外,从计算时的流场分布图(图9-图11)中也可以看出,不同流向角时,隧道内速度分布迥然不同。来流方向0°隧道内流场,有两个对转的漩涡,在中剖面处流速不稳定;在45°来流时,靠近船中一侧流速较大,船首一侧为一漩涡,而在135°时,靠近船首一侧流速比较大,在船中一侧为漩涡。因此测速仪的测量位置直接影响测量值的大小。

图9 流向0°、流速3 kn时,桨轴线水平剖面速度图(无桨)
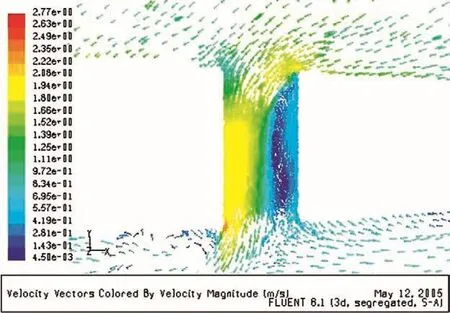
图10 流向45°、流速3 kn时,桨轴线水平剖面速度图(无桨)

图11 流向135°、流速3 kn时,桨轴线水平剖面速度图(无桨)
3.3.2 单隧道有桨(n=0)时的隧道内流速计算
有桨隧道模型是在无桨隧道船体的隧道内加上螺旋桨后生成,桨与隧道的一段组成一个计算域,
其他部分为另外一个计算域。计算流速点在隧道内距螺旋桨中轴线R / 2(R 为螺旋桨半径),距离船舶的中纵剖面0.7 m,位于螺旋桨的叶背一侧。这与无桨时测量点的位置相同。由于螺旋桨是4叶桨,
取圆周均布8点的轴向速度计算平均值,其中4点在叶前,另外4点在两叶的间隙处。来流速度分为1 kn、2 kn、3 kn,流向间隔为45°。图12 -图14给出在不同流向、流速的流作用下,隧道内桨前流速的计算结果和实验测量结果的比较。
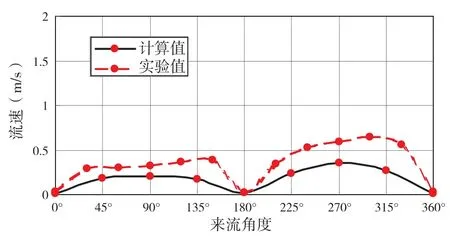
图12 (有桨)背景流速1 kn时,隧道内流速比较

图13 (有桨)背景流速2 kn时,隧道内流速比较

图14 (有桨)背景流速3 kn时,隧道内流速比较
计算结果表明,当隧道内有桨但未转时,隧道内流速小于无桨时隧道内流速,且来流在180°~360°之间比0°~180°之间的流速大,实验值的不对称要比计算值表现得更为突出。此外计算值比较光顺,实验值有起伏。在0°~180°范围内,水流从桨面流向桨背,测量点在叶片后,受叶片挡水的影响,测量和计算值小;在0°~360°范围内,水流从叶背流向叶面,测量点在桨叶前方,测量和计算的值比0°~180°内大。
综合看来,实验值比计算值偏大,测量值受叶片的影响比较明显。这主要是由于桨叶不动时,相当于导流片的作用,使水流产生旋转,螺旋桨流速仪会受到周向速度的影响,并且测点的布置也会受槽道内流场不均匀的影响所致。
3.3.3 单隧道侧推器不同来流的推力减缩计算
单隧道侧推器推力减缩计算模型和桨不转时相同,移动网格的旋转角速度设定为30.54 1/s,螺旋桨转速n为 291.6 r/min,同试验报告中一致。背景流速分别取1 kn、2 kn、3 kn,流向间隔45°。图15给出了计算值和实验值的比较,图中只画出180°~360°之间的比较,因为在此范围内是动力定位侧推装置工作的正常区域。

图15 计算与实验的推力比较
图15表明,除了实验值有波动外,计算值和试验结果相当。应该指出,在流向0°~180°之间,计算值的规律和试验结果有很大差别,主要表现在实验的推力减小,在130°左右达到最小值,计算值在0°~180°之间的推力、转矩、功率都比180°~360°之间大。0°~180°之间隧道中水流是从叶面流向叶背,螺旋桨处于负进速范围,在失速前推力增加。从敞水计算结果和相关资料上看,螺旋桨失速应在J=-0.25~-0.55之间,而从隧道流速的计算和测量结果分析,最大流速为2.0 m/s,计算进速系数为-0.196,达不到失速状态,计算结果应是正常的。而对于实验来说,由于水流状态受各种因素的影响,以及模型加工及安装等,会使螺旋桨的失速位置有变化,因此试验结果也是合理的。
3.3.4 三隧道侧推器推力减缩计算
三隧道侧推系统是在单隧道的基础上前后各增加一个隧道侧推器组成的,3个螺旋桨的尺寸和桨型相同,坐标系、网格形式、计算方法均与单隧道时相同,此处不再赘述。三隧道侧推器推力减缩计算内容包括:隧道内流速计算、螺旋桨推力计算和船体水动力计算三部分。来流速度有1 kn、2 kn、3 kn,流向0°~360°,以15°为间隔。1号隧道位置在舯前46.75 m、距基线2.2 m处,2号隧道位置在舯前50.65 m、距基线2.4 m处,3号隧道位置在舯前54.55 m、距基线2.6 m处,隧道纵向间距3.9 m。
(1)三隧道无桨时,隧道内流速计算
三隧道无桨时流速计算结果列于表4中。从中可以看出,在相同条件下,三个隧道中的流速变化和大小基本相同,这说明船体首部离隧道的距离足够远,船体对隧道所在位置处的流场影响基本相同。
(2)三隧道有桨(n=0)时,隧道内流速计算
三隧道有桨(n=0)时,隧道内流速计算结果列于下页表5中。从中可以看出,在相同条件下,三个隧道内流速变化和大小基本相差不大。在0°~18°之间,由于测量点在螺旋桨叶背一侧,水流受到桨叶的阻挡,流速变低,流动观测也可以发现,此时桨背附近是一个漩涡区。
(3)三隧道侧推器不同来流的推力减缩计算
三隧道侧推器推力减缩计算的背景流速分为1 kn、2 kn和3 kn,流向间隔30°,三个螺旋桨的转速相同,转速n为291.6 r/min。计算的推力列于下页表6中。计算结果表明:螺旋桨的推力随着背景流速的增大而减小,即推力减缩增大。
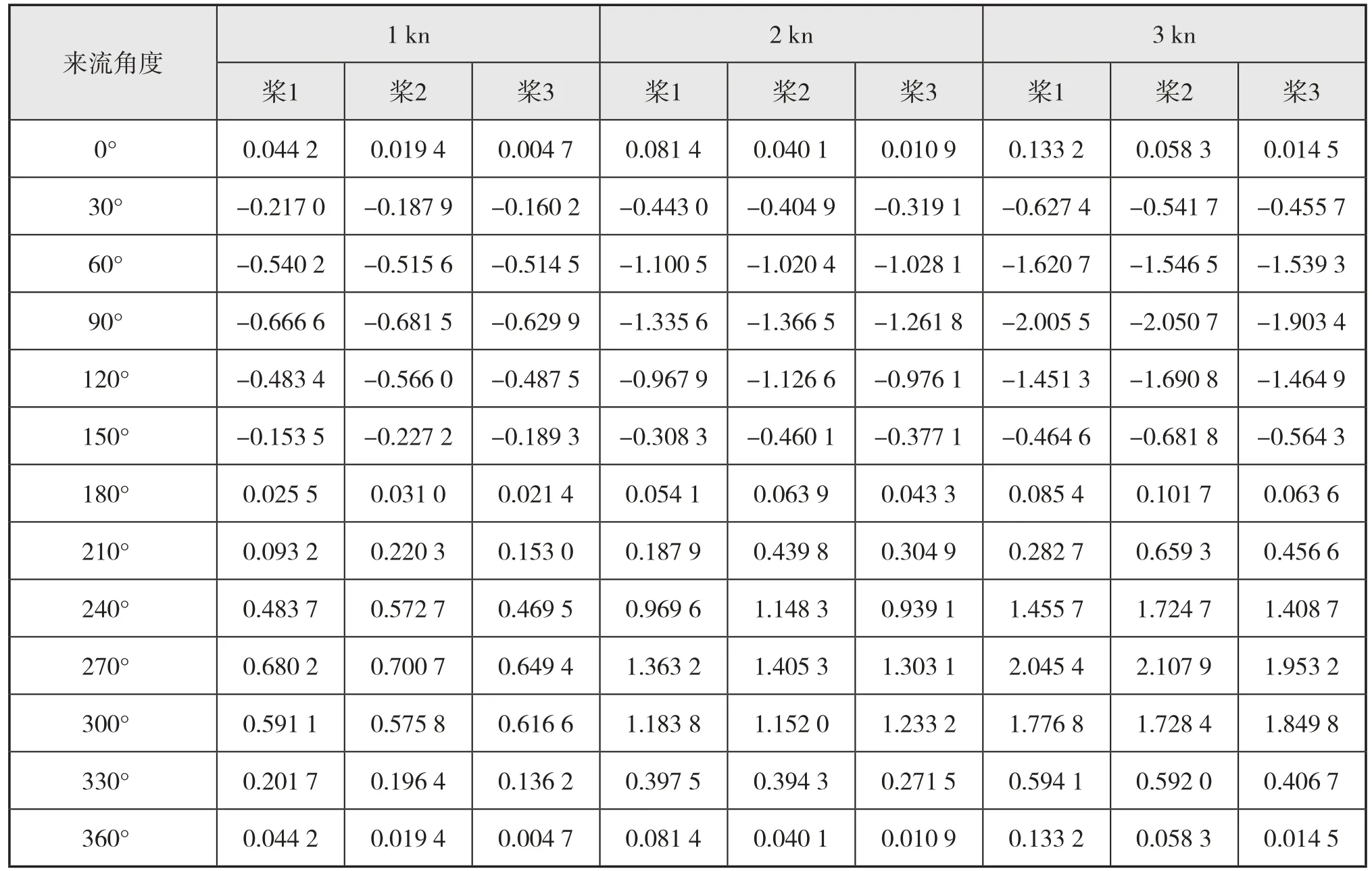
表4 不同背景流速下,三隧道无桨时的隧道内流速m/s
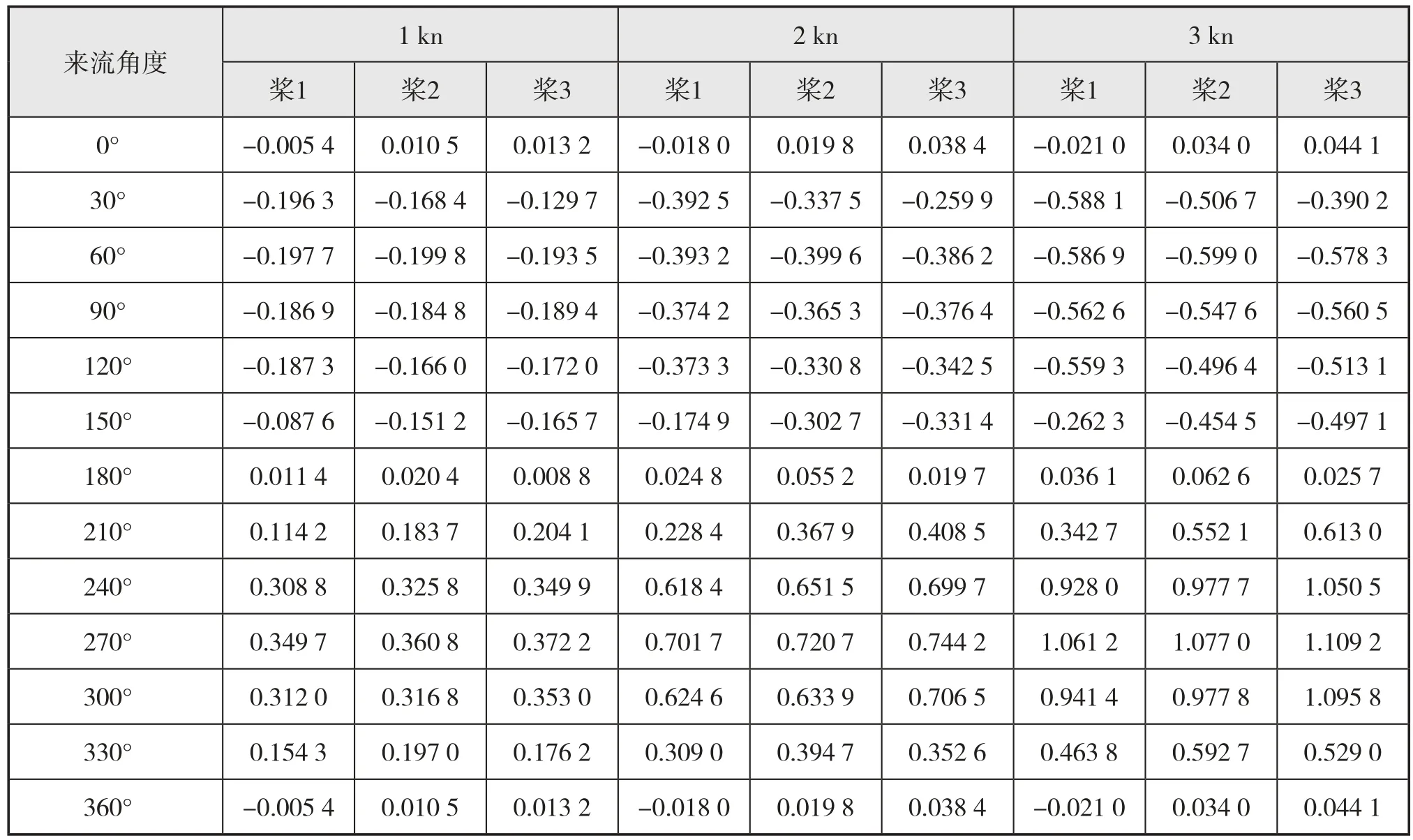
表5 不同背景流速下,三隧道有桨且n = 0时的隧道内流速m/s

表6 不同背景流速下,三隧道螺旋桨推力计算结果(n = 291.6 r/min)m/s
(4)改变侧推器间距后的螺旋桨性能计算
为了解隧道间距对侧推螺旋桨的影响,本文在原方案的基础上,将隧道间距减小后,以2 kn背景流速计算了侧推螺旋桨在不同来流方向时的推力和转矩。改变间距后的隧道位置是:2号隧道位置不变,纵向位置在中前50.65 m,垂向距基线2.4 m;1号隧道纵向位置在中前47.5 m,垂向距基线2.2 m;3号隧道纵向位置在中前53.8 m,垂向距基线2.6 m。隧道纵向间距3.15 m,由原来的1.857D变为1.5D,三个隧道的垂向位置保持原来不变。
计算结果表明:2号隧道中的螺旋桨推力、转矩与原间距时基本相同,几乎没有影响;1号桨的推力和转矩比原间距时小;3号桨的推力和转矩比原间距时大。
综合分析结果表明,隧道间距大于等于1.5D时间距的影响是小量,螺旋桨的推力大小主要与位置有关。靠近船首的螺旋桨推力减缩要比靠近船中的大。
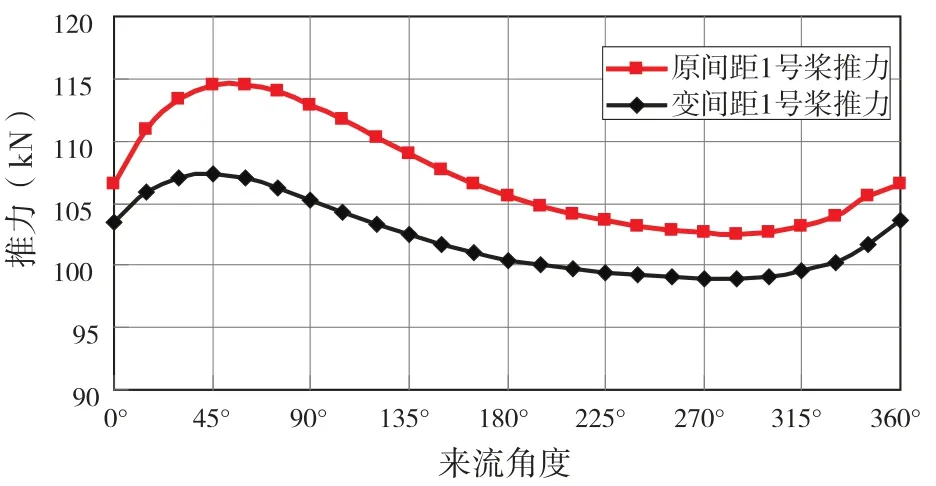
图16 背景流速2 kn时,1号桨推力比较
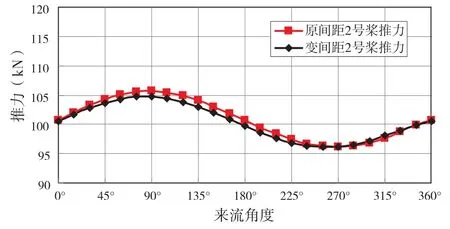
图17 背景流速2 kn时,2号桨推力比较
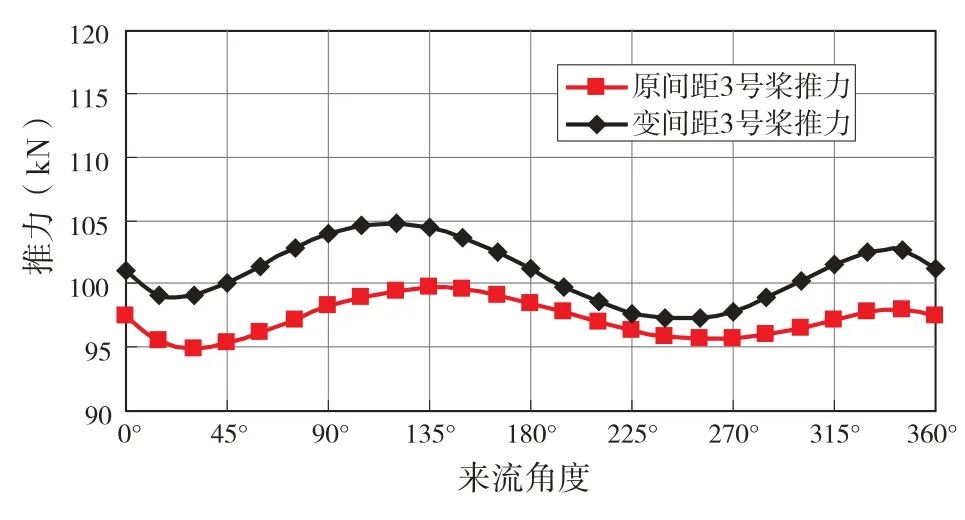
图18 背景流速2 kn时,3号桨推力比较
4 结 论
(1)通过对螺旋桨敞水性能计算和单隧道螺旋桨推力计算与模型实验的结果比较表明,本文的计算结果可供侧推系统研究中参考。
(2)隧道侧推装置螺旋桨的推力减缩,随背景流速的增加而增大。
(3)在三隧道情况下,侧推器越靠近船首螺旋桨推力减缩越明显,靠近船中的螺旋桨推力减缩比靠近船首的小。
(4)通过改变隧道间距的计算结果表明,在隧道间距大于1.5D时,间距对螺旋桨的推力减缩影响不大,位置的影响占主要地位。
(5)流场计算结果可作为改进侧推器槽道进出口形式的参考。
[1]LEHN E. Thruster Interaction Effect [R]. The Ship Research Institute of Norway: NSFI Report-102.80, 1980.
[2]MOBERG S,HELLSTROM S A. Dynamic Positioning of a Four-Column Semi-Submersible Model Tests of Interaction Forces and a Philosophy about Optimum Strategy when Operating the Thrusters [A]. Proceedings of the Second International Symposium on Ocean Engineering and Ship Handling [C]. Gothenburg, Sweden, 1983: 443-480.
[3]NIENHUIS U. Analysis of Thruster Effectivity for Dynamic Positioning and Low speed Manoeuvring [D]. Dissertation of Technical University Delft, 1992.
[4]彭涛,张承懿.侧推装置推力减缩试验报告[R]. 2003.
[5]叶明,姚朝帮.两船干扰力测试系统开发[J].船舶,2012(4):12-15.
On thrust deduction of side thruster
LI Qi-yao
(The Military Commissary Department in NO.427 Manufactory in Guangzhou, Guangzhou 510715, China)
This paper reviews the research of hydrodynamics interference of thrusters, and carries out the experimental investigation and CFD calculations of thrust deduction of side thruster under di ff erent current speed and direction. It also analyzes the change law of the thrust deduction of multiple side thrusters and the in fl uence of the spacing between side thrusters on thrust deduction. The results can provide reference for the arrangement of side thrusters and the improvement of the type of the inlet and outlet of thruster tunnels.
side thruster; thrust deduction; hydrodynamic interference; current speed and direction
U661.3
A
1001-9855(2014)04-0006-11
2014-04-28;
2014-06-16
李齐垚(1987-),男,硕士,工程师,研究方向:船舶总体设计和装备管理。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
能源工程(2022年2期)2022-05-23
舰船科学技术(2021年12期)2021-03-29
水利规划与设计(2020年1期)2020-05-25
火箭推进(2020年1期)2020-03-06
当代陕西(2018年12期)2018-08-04
科技创新导报(2016年31期)2017-03-30
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年3期)2016-09-27
